
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципы построения типовых СЭПСодержание книги
Поиск на нашем сайте
1) Одноконтурные СЭП. Состоят из контура, включающего в себя регулятор (Р), объект управления (ОУ), датчик регулируемого параметра и сумматор, сравнивающий заданную и отработанную приводом величину параметра.
Достоинства: простота и высокое быстродействие. Недостатки: не обеспечивает достаточной помехозащищенности и имеются проблемы ограничения регулируемых координат (чаще всего тока двигателя).
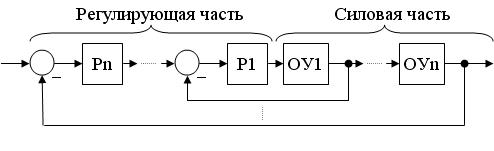
2) Системы подчиненного регулирования. Состоят из нескольких контуров, "вложенных" друг в друга.
Достоинства: а) Унификация структуры и настроек регуляторов. б) Простота ограничения регулируемых координат путем ограничения регуляторов соответствующих контуров. в) Удобство наладки СЭП на объекте. Контура настраиваются последовательно, от внутреннего к внешним.
Недостатки: а) Возрастание некомпенсируемой (малой) постоянной времени по мере увеличения числа контуров от внутреннего к внешнему, а следовательно, снижение быстродействия. б) Критичность динамики к изменению параметров объекта. При изменении, например, момента инерции обрабатываемой детали изменяются и показатели качества переходных процессов (см. рис.). Поэтому в случае изменения параметров объекта управления в широком диапазоне необходимо применение адаптивных систем.
3) Системы модального управления
Достоинства: а) Высокое быстродействие. б) Унификация структуры привода
Недостатки: а) Относительная сложность настройки привода. б) Критичность динамики привода к вариации параметров объекта.
Одноконтурные СЭП
1. Функциональная схема СЭП и статические характеристики системы
На выходе тахогенератора ТГ включен фильтр
2. Оптимизация динамики СЭП Структурно-динамическая схема СЭП может быть представлена в виде
На схеме введены обозначения: РС –регулятор скорости, П – силовой преобразователь, Д – датчик скорости; ДС – датчик скорости; При
где Должны быть скомпенсированы регулятором скорости для получения быстропротекающих малоколебательных переходных процессов; Компенсация больших постоянных времени физически происходит за счет форсировок выходных напряжений регуляторов.
ПФ разомкнутой системы будет:
С учетом малых постоянных времени можно определить настройку ПИД-регулятора.
1) Настройка на оптимум по модулю (ОМ):
ПФ разомкнутого контура скорости
Переходные процессы в системе определяются малыми постоянными времени. Большие постоянные времени скомпенсированы регулятором скорости. ПФ замкнутого контура скорости Настройка на ОМ соответствует коэффициенту демпфирования колебательного контура
2) Настройка на симметричный оптимум (СО):
ПФ разомкнутого контура скорости
ПФ замкнутого контура скорости Настройка на СО соответствует коэффициенту демпфирования колебательного контура
|
||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 1132; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.008 с.) |





 для сглаживания пульсаций и помех на коллекторе ТГ. Стабилитрон СТ выполняет роль токовой отсечки
для сглаживания пульсаций и помех на коллекторе ТГ. Стабилитрон СТ выполняет роль токовой отсечки  . При моментах двигателя
. При моментах двигателя  стабилитрон закрыт, при
стабилитрон закрыт, при  стабилитрон открыт и токовая отсечка вступает в действие, приводя к снижению напряжения регулятора скорости вплоть до остановки привода. Механические характеристики при этом называются экскаваторными.
стабилитрон открыт и токовая отсечка вступает в действие, приводя к снижению напряжения регулятора скорости вплоть до остановки привода. Механические характеристики при этом называются экскаваторными.

 ,
,  ,
,  - коэффициенты передачи;
- коэффициенты передачи;  ,
,  - "малые" постоянные преобразователя и датчика скорости;
- "малые" постоянные преобразователя и датчика скорости;  - электромагнитная (якорная) постоянная времени;
- электромагнитная (якорная) постоянная времени;  - электромеханическая постоянная времени.
- электромеханическая постоянная времени. структурная схема примет вид,
структурная схема примет вид,
 - "большие" постоянные времени, определяются
- "большие" постоянные времени, определяются 
 - "малые" постоянные времени не компенсируются, так как являются постоянными времени фильтров.
- "малые" постоянные времени не компенсируются, так как являются постоянными времени фильтров. ;
; - суммарная малая постоянная времени.
- суммарная малая постоянная времени. ; где
; где 
 ;
; ;
; и перерегулированию
и перерегулированию  ;
;
 ;
; ;
; и перерегулированию
и перерегулированию  .
.


