
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механизмы прерывистого движения.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
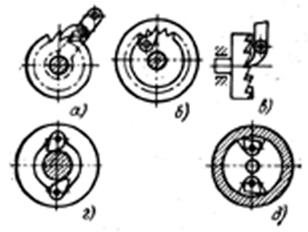
1. Храповые механизмы. Используют для преобразования колебательного движения ведущего звена во вращательное движение ведомого звена с остановами. Получение колебательного движения в большинстве случаев связано с использованием на промежуточной стадии преобразования вращения электродвигателя с помощью кривошипно-шатунных или кулисных механизмов. Применяются при прерывистом движении или поштучной подаче заготовок в зону контроля при его автоматизации.
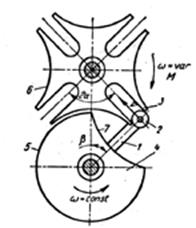
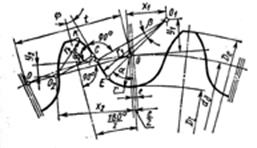
В основном используются зубчатые храповые механизмы, которые могут быть с внешним и внутренним зацеплением. Состоит из зубчатого колеса и одной или двух собачек, первая из которых является подающей, а вторая служит для фиксации зубчатого колеса при обратном ходе первой. Часто вторая собачка для фиксации колеса заменяется на фрикционную муфту. Попадание собачки во впадину между зубьями при рабочем ходе осуществляется за счет поджима пружиной (обычно дисковой). Глубина впадины обычно не превышает 4 мм при использовании в механизмах приборов. Число зубьев - не менее 10, равно числу циклов, требуемых в пределах одного оборота ведомого вала при выбранной кинематической схеме работы механизма. Рабочая сторона зуба выполняется либо по радиусу колеса, либо с небольшим поднутрением (в пределах 100). 2. Мальтийские механизмы. Используются при прерывистом движении, которое осуществляется с цикличностью 4...8 в пределах поворота ведомого вала. Обладают высокой надежностью. Состоит из креста и кривошипа с фиксирующим сектором. В большинстве случаев пазы в кресте направлены радиально, а угловой шаг между пазами постоянен. Учитывая, что кривошип должен входить в паз при их взаимном расположении под 900, то углы расположения кривошипа и креста определятся как
где z - число пазов креста. Соотношение размеров креста и кривошипа определится из зависимости
где М - межцентровое расстояние между осями креста и кривошипа. Следует отметить, что время поворота креста ТП и время его нахождения в неподвижном состоянии ТН соотносится как
Кулачковые механизмы.
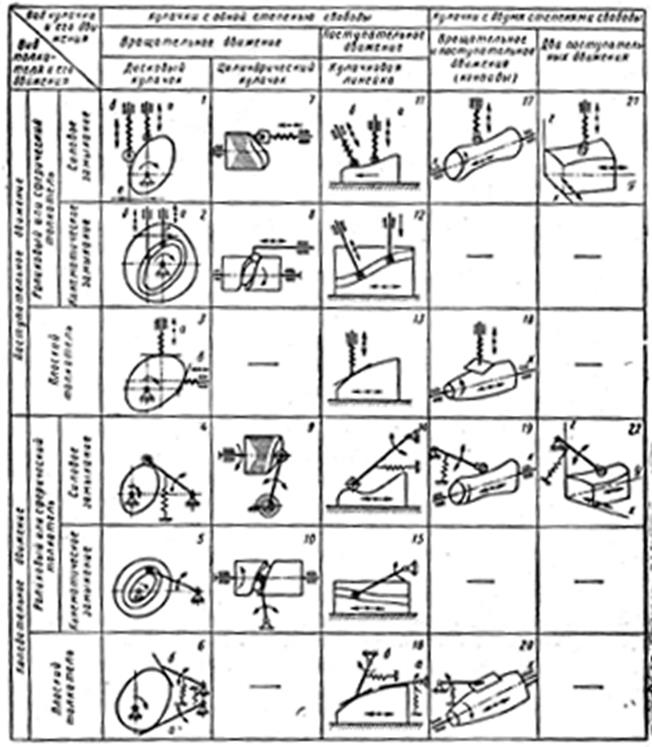
Кулачковые механизмы предназначены для преобразования вращательного движения кулачка в поступательное движение толкателя, осуществляемое по заданному закону. Учитывая высокие технологические возможности современного производства, точность изготовления кулачков очень высока и при изготовлении приборов можно считать, что она находится в пределах ±0.001...0.002 мм. Кулачковые механизмы используются в приборостроении как механизмы, передающие движение по требуемому закону, а также как контрольная система, обеспечивающая необходимое расположение измерительных приборов, соответствующее форме контролируемой поверхности и обеспечивающее относительный метод измерения. Кулачковые механизмы, применяемые в машиностроении и приборостроении классифицируются по количеству степеней свободы в зависимости от числа независимых движений кулачка, видам движений кулачка и толкателя, конструктивному исполнению кулачка, конструктивному исполнению наконечника толкателя, способу замыкания кинематической цепи. По количеству степеней свободы и конструктивному исполнению кулачка механизмы подразделяются на: - с дисковыми кулачками (линейки, диски) - используются в большинстве приборов; - с торцовыми или барабанными вращающимися кулачками - используются гораздо реже; - с объемными кулачками (коноиды и фасонные поверхности)- используются как мастер-копиры при контроле сложных поверхностей. По видам движений кулачка: - с вращением кулачка (плоские механизмы)- широко распространены в механических приводах; - с поступательным перемещением кулачка (плоские механизмы)- используются при настройке, например, синусные линейки; - с вращением и связанным или свободным поступательным перемещением кулачка (объемные механизмы); - с поступательным перемещением кулачка и дополнительным связанным или свободным поступательным перемещением кулачка (объемные механизмы). По видам движений толкателя: - поступательному; - колебательному. По конструктивному исполнению наконечника толкателя: - с острым наконечником; - с плоским наконечником; - с роликовым наконечником; - с шаровым наконечником. По способу замыкания кинематической цепи: - силовое замыкание с помощью пружины; - кинематическое замыкание формой кулачка.
Расчет параметров кулачковых механизмов. Основными ограничивающими критериями при назначении конструктивных параметров деталей кулачковых механизмов являются: - габариты механизма; - ход толкателя; - передаваемые усилия (напряжения давления в точке контакта кулачка и толкателя);
- углы давления в точке контакта. Кинематическая цепь кулачек-толкатель, чаще всего замыкается с помощью винтовых пружин сжатия-разтяжения и реже спиральными пружинами (при малых скоростях движения). Для того, чтобы в процессе работы кулачкового механизма на происходило размыкания контакта между кулачком и толкателем, необходимо, чтобы сила замыкания превышала инерционные силы механизма, то есть
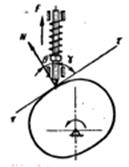
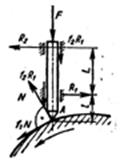
где S - математическое описание закона движения толкателя, mS - суммарная масса всех перемещающихся под действием кулачка элементов приспособления, k - коэффициент запаса, принимаемый из условий надежности 1.8...3. При изменении формы кулачка, связанном с заданием закона движения обеспечивается изменение высоты кулачка, что ведет к появлению в месте контакта силы давления N, направление которой не совпадает с направление движения толкателя. Разность данных направлений характеризуется углом давления q. Одновременно в точке контакта возникает сила трения f1N скольжения. В результате этого в направляющих, в которых перемещается толкатель, возникают реакции опор R1 и R2, а также сил трения - сопротивления R1f2 и R2f2, где f1, f2 - коэффициенты трения-скольжения, так как в большинстве случаев толкатели таких механизмов перемещаются в опорах скольжения (со смазкой или без). Во избежание заклинивания толкателя под действием сил трения необходимо ограничивать величину угла давления q. Его допустимое значение можно определить из уравнения
Решая систему уравнений можно определить значение qmax
где n =
Для компенсации погрешностей изготовления и сборки кулачкового механизма рекомендуется наконечник толкателя или ролика выполнять сферической формы. Это ведет к уменьшению пятна контакта, а следовательно и к большим деформациям (погрешностям) при значительных передаваемых нагрузках. Учитывая изменение рабочего усилия в процессе поворота кулачка на 1оборот, для точных перемещений рекомендуется производить расчеты данных деформаций и компенсировать их за счет увеличения пятна контакта или профиля кулачка. В большинстве случаев в измерительных приборах рабочие усилия не превышают 10...30 кгс, поэтому данным расчетом можно пренебречь, принимать толщину кулачка в пределах 3...5...10 мм, а поперечную кривизну профиля толкателя принимать равной радиусу контактного ролика. В большинстве случаев в дисковых кулачковых механизмах ход толкателя не превышает 30...40 мм, а кулачек вращается в одну сторону. При большем ходе рекомендуется использовать барабанные кулачки с обязательным их реверсом при возвращении в начальное положение. Минимальный диаметр дискового кулачка или барабана определяется по участку с наибольшим ростом его высоты. Если h - увеличение высоты профиля на наиболее крутом участке, а b - угловое расположение данного участка (в рад), то
где k - рабочий участок кулачка (в числах оборотов), k = 1, если кулачек выполнен с постоянным подъемом и на нем не предусмотрен участок сбега.
Профилирование кулачковых механизмов. Основу профилирования составляет заданный закон перемещения толкателя во времени S = S(t), а также полный цикл времени работы механизма TЦ. Время цикла приравнивается к угловой координате одного оборота кулачка (3600) и, опираясь на точность изготовления, принимают шаг расчетов DS = 0.250, 0.50, 10 и число расчетных точек n = 3600 / DS + 1. Задаваясь величиной времени t =
Примеры использования кулачковых механизмов.
1. Синусные линейки. Используются при контроле винтовых поверхностей - контроле их осевого шага. Представляют собой шпиндель приспособления с центром и поводком или с патроном для крепления детали. На шпинделе устанавливается диск или зубчатое колесо, которое посредством гибкого элемента (металлической ленты) или зубчатой рейки связано с поперечным толкателем, перемещающимся в осевом направлении вместе со шпинделем. На неподвижном столе приспособления установлена поворотная рейка, один из концов которой может поворачиваться на заданный угол. Величина угла a устанавливается по лимбу или с помощью набора размерных плиток h = Lsina, где L - длина базовой части линейки. Взаимосвязь между перемещением h и углом поворота шпинделя
где r - диска или делительной окружности колеса. При h = 2pr шпиндель делает полный оборот. Контроль ведется относительным методом, для чего контролируемая винтовая поверхность контактирует с индикатором.
2. Элементы приборов-самописцев. Из-за значительной массы перемещающихся элементов часто у данных систем привод осуществляется с помощью кулачков, работающих реверсивно от специальных электродвигателей (сельсины). Обычно используются кулачки с постоянным подъемом. При оценке результатов следует учитывать передаточное отношение рычажных механизмов.
Механизмы с гибкими звеньями. Данные механизмы могут быть классифицированы на 3 группы: - с креплением конца звена - в основном механизмы настройки; - без крепления - фрикционные механизмы - в основном приводные механизмы со значительной скоростью передаваемых движений (приводные от электродвигателей с числом оборотов более 500 об/мин) - с использованием ременной передачи; - цепные механизмы - при передаче синхронного движения на значительные расстояния на несколько потребителей.
Механизмы с креплением конца звена служат для преобразования вращательного движения во вращательное или поступательное и наоборот. Включают в себя 2 диска с прорезями для крепления, промежуточные шкивы для изменения направления движения и гибкие элементы в виде резиновых, синтетических, хлопчатобумажных (часто прорезиненных), металлических лент, шнуров или тросиков. Крепление осуществляется прижимными планками, приворачиваемыми болтами, либо после зафасовки конца ленты в паз забиванием в него клина или штифта. Шкивы могут быть различного диаметра. Однако не рекомендуется передаточное отношение механизма более 3. Для создания постоянного натяжения в системе используют упругие ленты или предохранительные фрикционные муфты с дополнительным поджимом пружинным устройством. Суммарное напряжение, возникающее в ленте, по условиям прочности ленты и точности системы не должно превышать допускаемых напряжений упругости. Так для лент из сталей 65Г, 60С2А, 65С2ВА эти напряжения равны [s] = 40...60 кгс/мм2 sS = где k - коэффициент запаса прочности (обычно 2...4); Р - сила натяжения; d - диаметр наименьшего шкива; Е - модуль упругости материала ленты (модуль Юнга); h - толщина ленты; b - ширина ленты.
Ременные передачи по форме передачи движения могут быть открытые и перекрестные. Различаются по форме используемых ремней: плоскоременные, клиноременные и с ремнями (обычно резиновыми) круглого сечения (пассиками). Ремни выпускаются цельными (в виде колец) и сшивными (из лент). В приборостроении рекомендуются только цельные (непрерывные) ремни. Плоские ремни выпускают из кожи (ГОСТ18697-73), цельнотканными из хлопчатобумажной пряжи (ГОСТ6982-75), 4...8 слойные, пропитанные специальными составами, с прочностью на разрыв 350...405 кгс/см2 поперечного сечения, работают при скорости до 25 м/с. Минимальный угол охвата шкива не менее 1500. При значительных передаточных отношениях для соблюдения данного условия устанавливают дополнительный натяжной шкив. Рекомендуемое предварительное натяжение ремней в пределах 0.5 кгс/мм2 поперечного сечения. Форма шкивов: плоские, радиусно-выпуклые, с фасками по краям, с внутренним пазом.
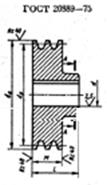
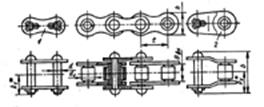
Клиновые кордотканевые или кордошнуровые (резинотканевые) ремни (ГОСТ1284-81) используют при значительных передаваемых моментах и скоростях. Наиболее употребимы в промышленности. Выпускаются с четко определенной формой сечения, определяемой маркировкой (О, А.Б...Д, Е),и постоянным углом профиля 40±10. Сечение ремня выбирается в зависимости от скорости и передаваемой мощности по таблицам справочников. Ремни также используют с предварительным натяжением за счет дополнительного натяжного ролика, либо за счет изменения межцентрового расстояния при установке. Передачи могут быть 1...6 ремневые. Форма шкивов полностью соответствует форме ремней и определяется по ГОСТ20889-75, ГОСТ20890-75, ГОСТ20891-75. Передачи с круглым сечением ремня (обычно резинового) применяются при малых передаваемых усилиях и скоростях, тиспользуются для приводов вспомогательных механизмов, наиболее часто используются в приборостроении особенно в приводах записывающих механизмов. Гасят рывки и толчки измерительной системы и привода. Цепные передачи по ГОСТ13568-75 в зависимости от передаваемых усилий могут быть однорядные и многорядные. Используются при скорости цепи менее 18 м/с, при передаточных отношениях менее 7, при высоких скоростях обязательна обильная смазка. Состоят из звездочек и кольцевой цепи. Цепь состоит из набора проушин, осей и втулок. С ее помощью реализуется так называемое цевковое зацепление. Размер цепи и звездочек определяется в зависимости от передаваемой скорости и усилия согласно рекомендаций справочников конструктора. Звездочка - зубчатая деталь, размер впадины которой позволяет разместить с рабочим зазором втулки цепи, шаг зубьев по начальной окружности равен шагу зубьев цепи, а вершина зуба утонена и выполнена в виде острого клина, обеспечивающего надежное попадание в звенья цепи. Цепь работает при предварительном натяжении. Уровень натяжения определяется прогибом прямолинейного участка под поперечным усилием 5...7 кгс, который не должен превышать 5...15 мм. Натяжение производится смещением натяжной звездочки, чаще изменением межцентрового расстояния при монтаже цепи.
Зубчатые механизмы.
Широко используются в машинах и приборах для передачи мощности от ведущего вала к ведомому при параллельных,скрещивающихся и пересекающихся осях, а также преобразования вращательного движения в поступательное.
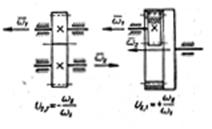
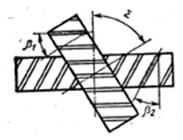
1. Наиболее часто встречающиеся механизмы представлены цилиндрическими зубчатыми колесами с параллельными осями “триб-колесо”. В приборах колеса с меньшим числом зубьев называют трибом или шестерней. Такие механизмы выполняются с внешним или внутренним зацеплением. Зубчатые колеса могут иметь прямые или косые зубья. Механизмы с прямыми зубьями применяются в тихоходных передачах при окружных скоростях менее 2...3 м/с и малых динамических нагрузках. Для повышения плавности работы используют колеса с винтовыми зубьями, причем у парных колес зубья имеют противоположное направление с одинаковым по величине углом наклона зубьев. 2. Для передачи вращения при пересекающихся осях используют также косозубые колеса с одинаковым по величине углом наклона зубьев, однако с одинаковым направлением. Угол наклона зубьев при этом равен половине угла скрещивания осей. Так при скрещивании осей под углом 900 угол наклона зубьев колес составляет 450.
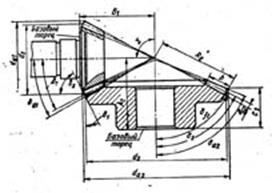
3. Для передачи вращения при пересекающихся осях колес используют конические зубчатые колеса, при этом величина угла скрещивания равна сумме половин углов начальных конусов колес, по которым между ними в зацеплении происходит качение. 4. Для преобразования вращательного движения в поступательное и наоборот используют механизм с зацеплением колеса и рейки.
5. При значительных передаточных отношениях в зубчатых механизмах используют червячное зацепление. Различают закрытые и открытые передачи. Открытые передачи тихоходны, не смазываются или смазываются тугоплавкими смазками типа Литол, ЦАТИМ, УС-1. Закрытые заключены в герметичные кожухи и смазываются разбрызгиванием за счет быстрого вращения одного из опущенных в масло колес. В зависимости от передаваемой нагрузки и чисел оборотов используют “Индстриальные” масла с вязкостью 8...20.
Снижение чисел оборотов в передачах происходит за счет разного числа зубьев парных колес. Передаточное отношение - U может достигать в приборах 15, а в машинах 8...10. При необходимости получения больших передаточных отношений используют многоступенчатые механизмы, имеющие несколько пар зубчатых колес (передач)
где Ui - передаточное отношение пары колес, Zi - число зубьев колеса. Зубчатые механизмы достаточно компактны, имеют высокий КПД и постоянство передаточного отношения, большую долговечность и простое обслуживание. Зубчатые механизмы, применяемые в приборостроении, имеют следующие особенности: 1. Учитывая малые передаваемые усилия, а также малые величины скоростей вращения параметры зубчатого зацепления часто выбирают конструктивно (по аналогии) и выполняют только проверочные расчеты, которые выполняются для наиболее нагруженной пары. 2. Большие передаточные отношения требуют использования трибов с малым числом зубьев (10...12), то есть работать с коррегированными колесами. 3. Часто действующий или передаваемый момент соизмерим с суммарным моментом сил трения, возникающего в механизме. В приборостроении используют различные виды зацепления, но наиболее часто - эвольвентное, 200 по ГОСТ16530-81. Основы эвольвентного зацепления.
Основой построения профиля зуба эвольвентного колеса является его качение по исходной инструментальной рейке, профиль которой задан по ГОСТ 13755-81. Шаг между зубьями рейки
где mn - нормальный модуль зубьев - коэффициент, определяющий соотношение между числом зубьев колеса и делительным диаметром колеса, на котором толщина зуба по дуге окружности равна ширине впадины.
Толщина зуба рейки и ширина впадины равны по средней линии (Рn/2). Высота зуба и глубина впадины, отсчитанные от средней линии равны между собой hf = ha = mn(hf(a)*+ c), где hf(a)* = 1, а c = 0.25 при mn ³ 1 мм и с = 0.3 при mn < 1 мм. Качение без скольжения производится делительным диаметром колеса по средней линии рейки. Основные параметры зацепления: делительный диаметр прямозубых колес d = mnZ, число зубьев колеса Z, диаметр выступов некоррегированного колеса de = d + 2 he, высота головки зуба колеса he = he* mn, коэффициент головки зуба колеса he* = 1, высота ножки зуба колеса hf = hf* mn, коэффициент ножки зуба колеса hf* = 1.25, 1.3, диаметр окружности впадин df = d - 2 hf, диаметр основной окружности dв = d cos a, угол зацепления a = 200. Вопросы по пройденному материалу: 1. Основное назначение передаточных механизмов? 2. По каким группам классифицируют передаточные механизмы? 3. Основные требования, предъявляемые к передаточным механизмам? 4. Какой зависимостью описывается преобразование движений синусного механизма? 5. Какой зависимостью описывается преобразование движений кулисного механизма? 6. В конструкции каких приборов используются шарнирные механизмы? 7. Какой зависимостью описывается преобразование движений поводкового механизма? 8. Какой вид резьбы наиболее рекомендуем к применению в винтовых ходовых механизмах для поступательного перемещения суппортов измерительных приборов? 9. Какие винтовые механизмы рекомендуются для поступательного перемещения суппортов измерительных приборов? 10. С какой целью и в каких условиях используются вариаторы? 11. Условия применения фрикционных предохранительных муфт? 12. Условия применения храповых механизмов? 13. Условия применения “мальтийского креста”?
Лекция № 6 План лекции: 1. Зубчатые механизмы. 2. Крепление зубчатых колес. 3. Механизмы деления. 4. Шкалы.
В процессе качения колеса по рейке боковая прямолинейная поверхность зуба рейки формирует боковую поверхность зуба колеса как огибающую ее многократных положений в процессе обката. Данной огибающей является кривая линия, называемая эвольвентой. Эвольвента строится как след конца прямой линии, которая без скольжения катится по окружности, называемой основной (dв). При этом данная линия в любом положении проходит перпендикулярно к линии, касательной к эвольвенте в точке пересечения. Для схемы координат XOY, когда начало эвольвенты лежит в точке А с координатами (rв, 0) расстояние от точки Б до эвольвенты i равно длине дуги АБ d
Откуда эвольвента описывается зависимостями
В случае, когда координатная ось проходит по середине зуба колеса угловая координата d имеет смещение D = -
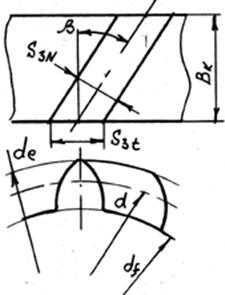
то есть d = d + D. Согласно рекомендаций нормативных документов требуемое значение модуля следует принимать из числового ряда: mn = 0.1; 0.3; 0.5; 0.7; 0.8; 0.9; 1; 1.25; 1.5; 1.75; 2; 2.25; 2.5; 2.75; 3; 3.5; 4..... При косозубом зацеплении профиль инструментальной рейки задается в сечении перпендикулярном направлению зуба. Для определения конструктивных параметров колес необходим перевод размеров рейки в нормальном сечении в торцовую плоскость колеса:
торцовый шаг рейки Рt = Pn / cosb (Pn = p mn), угол наклона зуба на делительном диаметре b, торцовый модуль mt = Pt / p = mn / cos b, торцовый угол зацепления at находится из условий
Расчет конструктивных параметров косозубых колес производится в торцевой плоскости по вышеприведенным зависимостям с заменой mn на mt и a на at, при этом при расчете параметров зуба he и hf используется значение модуля mn.
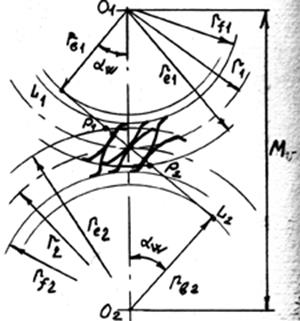
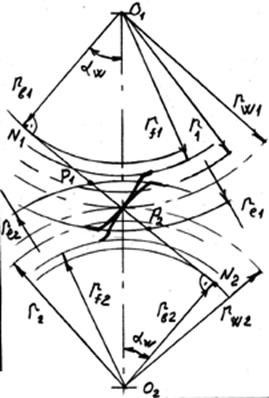
Условия зацепления некоррегированных колес. Качение без скольжения некоррегированных колес осуществляется по делительным окружностям, соответственно межцентровое расстояние зацепления определяется как
В точке касания Р зубьев касательные к их боковым поверхностям совпадают, а следовательно нормали в данной точке к рассматриваемым поверхностям лежат на одной линии, при этом данная линия проходит касательно к основным окружностям сопряженных колес. Так как это условие независимо от углового положения зубьев во время зацепления, то точка Р будет в любой момент времени лежать на прямой N1N2. Линия N1N2 называется линией зацепления N1N2 = rв1tgaW + rв2tgaW = M sin aW. Моменты сил, действующих в точке контакта будут постоянными, так как действуют вдоль линии зацепления, а радиусы действия этих моментов будут постоянными и равными радиусам основных окружностей r1 и r2. Это обеспечивает постоянство передаточного отношения в пределах поворота на 1 зуб
Окружности, по которым происходит качение, называют начальными (rW1, rW2) и для некоррегированных колес они совпадают с делительными окружностями. Угол зацепления (aW) в этом случае равен торцовому углу зацепления (at)
Рабочий участок линии зацепления Р1Р2 определится из условия пересечения линии зацепления окружностями выступов
Р1Р2 = N1N2 - L1P1 - L2P2.
Коррегированные колеса
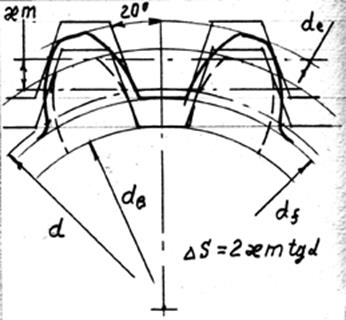
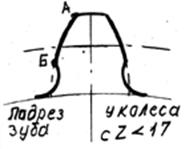
При использовании зубчатых колес с числом зубьев Z > 17 процесс контакта зубьев происходит в пределах линии Р1Р2, расположенной на линии N1N2. Это обусловлено тем, окружность впадин зубьев имеет радиус больший или равный основной окружности. При уменьшении числа зубьев колес rf становится меньше rв. Это приводит к уменьшению размера эвольвентного участка на зубе и при изготовлении таких колес возможно срезание (подрезание) части боковой поверхности зуба и уменьшение длины участка контакта зубьев по боковой поверхности. Для уменьшения подрезанного участка проводят коррекцию профиля зубьев. Она заключается в смещении инструментальной рейки от исходного положения (по отношению к делительной окружности колеса) на величину b. При этом увеличивается толщина зуба по делительной окружности и радиус окружности впадин при одновременном уменьшении величины площадки на вершине зуба. Величина коррекции обычно задается коэффициентом коррекции c
b = c mn. Увеличение толщины зуба по дуге делительной окружности D = b tga, тогда угол зацепления начальных окружностей aw определится по зависимости:
Диаметры начальных окружностей колес, находящихся в зацеплении определяются как rw1 = rв1 / cos aw rw2 = rв2 / cos aw. Основные параметры коррегированных колес, отличающиеся от рассчитанных для некоррегированного зацепления: de = d + 2 he + 2 b, df = d - 2 hf + 2 b, M = rW1 + rW2. Коррекция колес позволяет получить необходимые значения межцентрового расстояния при заданном числе зубьев колес. Обычно для приборов используют зацепление с m = 0.1...1 мм и высотой зуба h=1.1...2.5m. Кроме эвольвентного по ГОСТ16530-81в приборостроении используют специальные виды зацепления. 1. Для индикаторов используют эвольвентное зацепление с высокими зубьями и большим боковым зазором. Высота головки зуба увеличена до ha=1.2m, а межцентровое расстояние на 0.4 m. При этом минимальное число зубьев шестерни может быть уменьшено до 9, а сопряженное колесо иметь не меенее 30 зубьев. Такое зацепление используется при формировании гитар сменных колес. 2. В наиболее точных передачах используют прецезионное эвольвентное зацепление с a=15°. 3. Часовое зацепление. Обладает малой точностью, однако при малом модуле (m = 0.08...0.5 мм) проще в изготовлении. В этом случае головка зуба очерчена дугами окружности, а ножка радиальными прямыми. Имеет значительный боковой зазор и применяется в передачах с принудительным выбором зазора за счет гибких элементов (пружин) и отсутствием реверса движения. 4. Цевочное зацепление используется, когда рейка или сопряженное колесо имеет круговые зубья (например цепные передачи). Упрощенное по форме, более легкое при изготовлении, но имеет пониженную точность. 5. Специальные зацепления (в основном с пониженной точностью). В приборах используют, хотя и редко: шаровое зацепление и зубчатые механизмы с некруглыми колесами.
|
||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 794; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.23.103.14 (0.011 с.) |

 ,
,  ,
, ,
, .
.
 ,
, .
. ,
, . Результаты расчета и опыт использования таких механизмов показывает, что с учетом эксплуатационного запаса не рекомендуется для острых толкателей принимать qmax больше 6...100. При использовании толкателя с роликом на конце рекомендуется принимать qmax £ 160...200. При использовании качающихся толкателей допускается угол давления по отношению к направлению толкателя более 600.
. Результаты расчета и опыт использования таких механизмов показывает, что с учетом эксплуатационного запаса не рекомендуется для острых толкателей принимать qmax больше 6...100. При использовании толкателя с роликом на конце рекомендуется принимать qmax £ 160...200. При использовании качающихся толкателей допускается угол давления по отношению к направлению толкателя более 600.
 ,
, , где i - порядковый номер точек от 1 до n. Подставляя t в S = S(t) и i в a = DS(i-1), рассчитывают параметры кулачка в соответствующих координатах, если направление движения толкателя проходит через ось кулачка. При остром конце толкателя расчеты заканчиваются. При роликовом наконечнике с помощью расчетов, либо графически определяется эквидистанта, которая и будет являться профилем кулачка. В этом случае особенно на вогнутых участках кулачка возможно срезание его рабочего профиля. Поэтому профилирование кулачков является сложной задачей и требует использование специальных зависимостей, которые даются в справочной литературе.
, где i - порядковый номер точек от 1 до n. Подставляя t в S = S(t) и i в a = DS(i-1), рассчитывают параметры кулачка в соответствующих координатах, если направление движения толкателя проходит через ось кулачка. При остром конце толкателя расчеты заканчиваются. При роликовом наконечнике с помощью расчетов, либо графически определяется эквидистанта, которая и будет являться профилем кулачка. В этом случае особенно на вогнутых участках кулачка возможно срезание его рабочего профиля. Поэтому профилирование кулачков является сложной задачей и требует использование специальных зависимостей, которые даются в справочной литературе.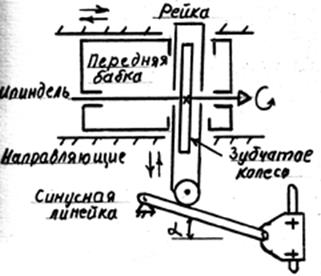
 ,
,

 [s],
[s],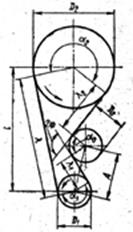

 ,
,
 = p mn,
= p mn,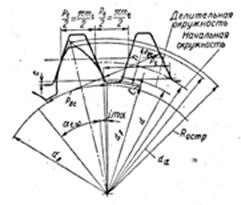

 ,
,
 .
. ,
,


 .
. .
.
 .
. ,
,
 ,
,


