Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Что понимается под компьютерной обработкой изображений и где она применяется, в какой степени и как используются при обработке данных дэз.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Что понимается под компьютерной обработкой изображений и где она применяется, в какой степени и как используются при обработке данных ДЭЗ. · Компьютерная обработка изображения – обработка цифровых изображений с помощью компьютеров или других специализированных средств или устройств, которые построены на цифровых сигнальных процессорах. Фактически обработка изображения не только улучшает зрительное восприятие изображения, но и классификацию объектов выполняемую при анализе изображения. · ААДЗЗ широко применяется при анализе местности (лесхоз, с/х, военная разведка, МЧС) · При компьютерной обработки информации решается широкий круг задач: улучшение качества, измерение параметров сигнала, спектральный анализ многомерного сигнала, сжатие изображения, распознавание образов.
2. Преобразование к главным компонентам. Свойства преобразования к главным компонентам. · Преобразование к ГК будет оптимальным в том смысле, что оно будет единственным, которое приводит ковариационную матрицу исходного многоспектрального снимка к диагональному виду (11.13):
Собственное значение (лямбда) определяется как k-й корень характеристического уравнения (11.14):
Где С – ковариационная матрица исходных данных, а I – диагональная матрица тождественного преобразования. Каждое из собственных значений матрицы равно дисперсии главного компонента изображения вдоль новых координатных осей и поэтому сумма всех собственных значений должна быть равна сумме дисперсий, которая рассчитывается для всех диапазонов исходного снимка, таким образом, суммарная дисперсия будет сохранена. Поскольку матрица диагональная, изображения, соответствующие главным компонентам, являются некорилированными. Их нумерую в порядке уменьшения дисперсии. Результатом преобразования снимков к главным компонентам является устранение корреляционной зависимости между исходными k-мерными данными при одновременном сжатии большей части дисперсии полного изображения до меньшей размерности. Координатные оси в пространстве главных компонент определяется K собственными векторами ek. Собственный вектор, соответствующий собственному значению (лямбда k), находится из следующего векторно-матричного уравнения (11.15):
Собственные векторы образуют строки матрицы преобразования WPC (11.16):
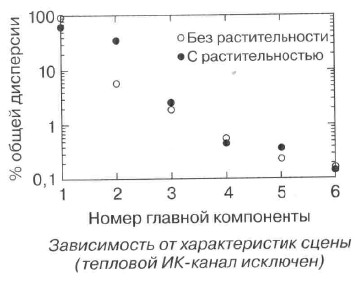
Где – j-й элемент i-го собственного вектора. Элементы собственного вектора являются направляющими cos между осями исходной и новой системы координат. На этом анализ собственного значения завершается и применяется (11.11). Компонента собственного вектора eij становится весовым коэффициентом спектрального диапазона j. · Рассмотри некоторые свойства преобразования главных компонент: 1) Преобразованием к главным компонентам является жесткое вращение, при котором совмещаются оси исходной системы координат k-мерного пространства с главными осями исходного набора данных. 2) Хотя в k-мерном пространстве главных компонент оси системы координат ортогональны, их проекции в пространстве исходных данных могут не обладать исходными свойствами. Поэтому проекции двух главных компонент, полученные для набора данных не могут совпадать при проецировании на одну из координат плоскостей исходного снимка. При большой размерности исходного набора данных нельзя использовать двумерную диаграмму рассеяния. 3) Преобразование набора данных к главным компонентам приводит к оптимальным перераспределениям дисперсии. То есть изображение, соответствующее первой главной компоненте обладает наибольшей дисперсией, суммарная дисперсия исходного набора данных всегда будет сохраняться. 4) Матрица преобразования WPC зависит от исходного набора данных. Если возьмем один снимок с растительностью, а другой без него, то:
Чем выше порядок главной компоненты, тем меньше полезной информации и больше шума. Алгоритм сжатия JPEG2000 Отличия от стандартного jpeg: -лучшее качество изображения при сильной степени сжатия; -кодирование отдельных областей с лучшим качеством; -основной алгоритм сжатия заменен на wavelet преобразования; -для повышения степени сжатия в алгоритме используется арифметическое сжатие; -в jpeg2000 появилась функция поддержки сжатия без потерь; -поддержка сжатия однобитных (двухцветных) изображений. Идея алгоритма: Она очень похожа на обычный jpeg: -в обоих алгоритмах используется сдвиг по яркости; -преобразование RGB в композицию YUV, Y – яркость, UV – разница цветов.
-дискретное wavelet преобразование; -квантование; -mq кодер – один из вариантов арифметического сжатия.
Общие характеристики jpeg2000 -степень сжатия от 2до 200, также имеет возможность сжатия без потерь; -класс изображений: полноцветные 24-битные, изображения в градации без резкого перехода цветов, однобитные; -симметричность от 1 до 1,5;
Особенности: -позволяет удалять визуальные неприятные эффекты; -при сильном сжатии появляется блочность и большие волны в вертикальном и горизонтальном направлении.
А)Квантовые Б)Тепловые А) Основаны на изменении электрических свойств полупроводника при поглощении фотонов. Фотодиоды, Фоторезисторы, ПЗС. Наибольший интерес – ПЗС. Они обеспечивают высокое разрешение, большие форматы изображения, у них есть возможность управлять экспонированием. Плюсы: высокая однородность чувствительных элементов, более высокое отношение сигнал/шум, малые габариты, малый вес, малая потребляемая мощность. Б) Используют эффект изменения электрических свойств материала либо сопротивление, либо емкость в зависимости от температуры. Изменение электрического сопротивления материала при радиационном нагреве => изменение температуры материала. Болометрический эффект характеризуется температурным сопротивлением материалов.
R – сопротивление материала чувствительного слоя болометра при температуре t. 3 класса твердотельных тепловых: Болометры Пироэлектрические приемники. Чувствительным элементом у них является фотоэлектрический конденсатор, при изменении температуры конденсатора изменяется его диэлектрическая постоянная (изменяется емкость). Термопары. Используют свойство двух разных слоев (изменение разностоного потенциала). Обработка сигналов.
Компьютерная обработка изображения возможна в том случае, когда мы преобразовали сигнал в цифровую форму. Очень много зависит от модели изображения, от системы канала связи, от влияния передающей и принимающей систем. Модель изображения – это набор функций, описывающих какие-то характеристики изображений. Например, функция яркости (яркость может изменяться по всей плоскости), функция спектральной характеристики изображения (зависит от диапазона). Для формирования любого изображения, в общем случае, требуются следующие аппаратные устройства:
1. Система получения изображения (любая: оптическая, цифровая) 2. Оптико-электронный преобразователь 3. Аналогово-цифровой преобразователь 4. Устройство цифровой обработки сигналов изображения В общем случае любое непрерывное изображение можно представить функцией пяти аргументов: F(x,y,z,t,λ) – координаты, время, длина волны. Упрощение этой модели приводит к модели пространственно - временного сигнала ЦОС – цифровая обработка сигнала. DSP – digital signal processor. Любой непрерывный аналоговый сигнал S(t) можно подвергнуть дискретизации по времени и квантованию по уровню. Если частота дискретизации сигнала F(d) не меньше чем удвоенная наивысшая частота в спектре сигнала Процесс преобразования сигналов называется фильтрацией, а устройство фильтр. Поскольку отсчеты сигналов поступают с какой-то постоянной скоростью, то наш фильтр должен успевать обрабатывать текущий отсчет до прихода следующего. Задачи: добиться фильтрации в режиме реального времени даже при задержке.
Цифровые сигнальные процессоры. Применяются как для непрерывных, так и для прерывных.(??) … Различают методы обработки сигналов во временной и частотной области (time domain, frequency domain). Эквивалентность преобразований однозначно можно определить только через преобразование Фурье. Обработка сигналов во временной области широко используется в цифровом осциллографе. Для представления сигналов в частотной области используются цифровые анализаторы спектра. Для изучения математических аспектов используются ППП (маткад, матлаб). Вейвлет преобразования – можно обрабатывать сигналы с разрывами, пакетные сигналы и другие нестандартные виды сигналов. Радиометрическая коррекция. Радиометрическая коррекция – устранение ошибок связанных с условиями освещенности сцены, также ошибок связанных с состояниями атмосферы, с чувствительностью сенсора т.д. т.е. тех параметров которые могут меняться в зависимости от аппаратуры и условий окружающей среды. Рассмотрим случай атмосферной коррекции. Все возможные варианты светокоррекции 3 группы: 1. Физическое моделирование взаимодействия излучения с атмосферой. Получим пересчет измеренных значений к условиям абсолютно прозрачной атмосферы. Однако, для того чтобы делать физические модели нам необходимы точные достоверные и подробные метеорологические данные (влажность Т хим состав, примеси и т.п.). Если будет большой объем данных требуются огромные вычислительные ресурсы 2. Метод минимума гистограммы. На гистограмме (рис лист 1) яркости видимого света определяют наименьшее значение. И далее из всех значений яркости всех пикселей нашего изображения вычитают это наименьшее значение. Метод является крайне приближенным. Не рекомендуется. 3. Методы линейной регрессии.
Данные наносят на координатную ось, где х – видимый диапазон, у – инфракрасный. Далее методом наименьших квадратов подбирают кривую наиболее точно описывающую этот набор данных. Смещение а на оси х и будет являться поправкой на влияние атмосферой. 15. Что такое стандартизованные методы главных компонент. Преобразование колпачок с кисточкой. Категории улучшения методов - Пространственные методы - Частотные методы Пространственные методы оперируют над понятием – пространственная область (относят к плоскости изображения). Напрямую базируют над пикселями.
Частотные методы оперируют в частотной области
Функция градиентного преобразования. Значения пикселей до и после обработки: r, s.
T – Преобразование какое-то Введение в преобразование 1 линейное -1 тождественное 2 негатив 3 n-степень 4 логарифмическое -1 не используется Преобразование изображения в негатив [0, L-1]. S=L-1-r. создает эквивалент фотографического негатива – для усиления белых или серых деталей. Логарифмический. S=c*log(1+r) при r≥0 Указывает данное преобразование. Отображает узкий диапазон малых значений яркости на исходном изображении более широкий диапазон яркости в выходном изображении. Используя случай, когда необходимо использовать с проведение растяжения с современным сжатием. Степенные преобразования
Отличие от логарифмического преобразования. Возникает семейство возможных преобразований: Гамма-коррекция – степенное преобразование 1=1 1 2=0,62 1,5 3=0,4 2,5 4=0,2 5 5=0,1 10 6=0,04 25 Часто используемые линейные преобразования в программах обработки изображения Этап классификации 1в классификация объектов на снимке, 2в неконтролируемая классификация, 3в неконтролируемая, 6в дополнительные сведения, 4в классифицированные данные, 5в постобработка этих данных (группирование классов). В классификации используются такие методы как: IHS, (intensivety, huesituation интенсивность тон насыщенность), метод главных компонент (PCA), isodata (итеративная самоорганизующая методика анализа данных), неиронные сети прямого обратного распросатранения, кластерный анализ и т.п. Сжатие алгоритмом Хафмана. Характеристики алгоритма. - степень сжатия (лучший, средний, худший, 8;1,5; 1 – исходный файл равен полученному); - симметричность по времени (пропорции архивации и разархивации). - характерные особенности: это один из алгоритмов, который не увеличивает размер исходных данных в лучшем случае. Арифметическое сжатие Связано со сроком действия с патентом. Например, если есть символы a, b, c, d, то с вероятностью ½, ¼, 1/8, 1/16 для их кодирования будут использовать коды 0,01,101, 1010
Арифметическое сжатие дает лучшую степень сжатия. По теореме шеннона если будем кодировать символы с относительной частотой f с помощью -log2(f) [количество бит]. Относительная частота символа.
Когда возникает ситуация, когда частоты не кратны степени 2, то сжатие становится не эффективным. Мы представляем кодированный текст в виде дроби. Дробь представлена так, чтобы текст был компактным. [0;1) – этот интервал разбиваем на интервалы (интервалы вероятности появления символа в потоке)
КОВ. КОРОВА
Эта таблица известна компрессору и декомпрессору, таким образом, кодирование будет заключаться в уменьшении рабочего интервала.
В качестве следующего рабочего интервала берется диапазон кодируемому текущему символу. Его длина пропорциональна символу в потоке i1---h1. Длина интервала уменьшается с вероятностью наступления признака (вероятность текущего признака), а точка начала сдвигается в право. Окончательная длина интервала равна произведению вероятностей всех встретившихся символов. А начало зависит от порядка следования символа в потоке.
Фильтры свертки Все основные операции при использовании фильтров свертки выполняются в скользящем окне. Значения пикселей внутри скользящего окна используются для расчета нового значения центрального пикселя. Как только произошел расчет, окно смещается вправо. В качестве операции выполняемой в окне может использоваться практически любая функция.
Типы локальных фильтров
Линейный фильтр рассчитывается в пространственной области как взвешенная сумма исходных значений пикселей в скользящем окне. Дискретную свертку исходного изображения f и придаточную функцию W можно записать:
У нас размеры скользящего окна намного меньше всего изображения, то суммирование производится не по всем параметрам: Wx и Wy - размер скользящего окна
Если W – нечетное, то W/2 округлятся в меньшую сторону. Новое значение пикселя gi,j является взвешенной суммой исходных значений пикселей в некоторой его окрестности. В основе линейной фильтрации лежит принцип суперпозиций, согласно ему, результат фильтрации суммы двух и более входных сигналов равен сумме результатов, которые были получены при независимой обработке каждого входного сигнала по отдельности. Алгоритм можно представить в следующем виде: 1.переворот строк и столбцов, используемой в скользящем окне функцией (эквивалент: поворот на 180); 2.центрирование окна на обрабатываемом пикселе; 3.перемножение весовых коэффициентов окна и значений соответствующих пикселей исходного изображения; 4.суммирование взвешенных значений и сохранение результата в качестве выходного значения пикселей; 5.возвращение в шагу 2 и пока не будет достигнут конец изображения (пока не будут обработаны все пиксели). Шаг 1 не обязательно делать для симметричных.
Фильтры LP и HP P(x,y)=LPF*p(x,y)+HPF*p(x,y)=(LPF+HPF)p(xy)=IFp(x,y) IF – тождественный фильтр (или дельта функция) Равенство выполняется если сумма фильтра H и B частот = тождественному фильтр. LPF сохраняет локальное среднее значение и сглаживает выходной сигнал (чем больше локальное окно, тем больше уровень сглаживания). HPF обнуляет локальное среднее значение и на выходе дает сигнал, характеризующий отклонение входного сигнала от локального среднего.
Полосовые фильтры Изображение с полосовой фильтрацией можно представить как результат применения низких и высоких частот. Bp(x,y)=HPF[LPFp(x,y)]=HPF(Lp(x,y)) Полосовые фильтры в основном применяют для выделения и устранения периодических шумов.
Направленные фильтры
Граничная область Дано окно wj*wi (3*3) - граничная область (рисунок 1) w/2, округляется в большую сторону.
Выходные пиксели нельзя посчитать непосредственно и так как окно не может выходить за границы изображения, то для сохранения размеров выходного изображения нужно использовать дополнительные приемы. Применяют: 1. Метод основан на повторе ближайшего пикселя в каждом граничном пикселе
2. Отражение выходных пикселей из граничной области наружу с целью увеличения размера входного изображения
3. Уменьшение границы области применения фильтра на 1 (был 3х3, делаем 2х2) 4. Установка значения граничного пикселя 0 или среднему значению. 5. Переход окна фильтра на противоположную сторону В общем случае, для сохранения размера изображения и без образования серьезных искажений наиболее эффективными будут 1 и 2 метод.
Интервальное кодирование Оно предполагает что мы имеем дело с целыми дискретными величинами, которые принимают ограниченное число значений [0, N). N –число возможных значений переменных, используемых для хранения границ интервала. Мы должны закодировать каждый символ S посредством –log2(fs), где fs – частота символа s. Для каждого символа s мы можем отвести на интервале диапазон значений: [N(Fs), N(Fs+fs)) где Fs – накопленная частота символов, предшествующих символу s в нашем алфавите, N(f) – значение соответствующее частоте f в интервале из N возможных значений. Чем больше будет значение N(fs), тем точнее будет представление символа s в интервале наших значений. fs>0. Все рассмотренные методы применимы для любой информации. Фильтры LP и HP P(x,y)=LPF*p(x,y)+HPF*p(x,y)=(LPF+HPF)p(xy)=IFp(x,y) IF – тождественный фильтр (или дельта функция) Равенство выполняется если сумма фильтра H и B частот = тождественному фильтр. LPF сохраняет локальное среднее значение и сглаживает выходной сигнал (чем больше локальное окно, тем больше уровень сглаживания). HPF обнуляет локальное среднее значение и на выходе дает сигнал, характеризующий отклонение входного сигнала от локального среднего.
Полосовые фильтры Изображение с полосовой фильтрацией можно представить как результат применения низких и высоких частот. Bp(x,y)=HPF[LPFp(x,y)]=HPF(Lp(x,y)) Полосовые фильтры в основном применяют для выделения и устранения периодических шумов.
Полосовые фильтры Изображение с полосовой фильтрацией можно представить как результат применения низких и высоких частот. Bp(x,y)=HPF[LPFp(x,y)]=HPF(Lp(x,y)) Полосовые фильтры в основном применяют для выделения и устранения периодических шумов.
Направленные фильтры
Алгоритм сжатия изображений Основной объект – это изображение, тип данных, который характеризуется тремя особенностями: 1.Изображение требует большего объема памяти при хранении, чем текст. 2.Человеческое зрение при анализе изображения оперирует контурами, общим переходом цветов, следовательно человеческий глаз не особо чувствителен к небольшим изменениям в изображении, т.е. можно создавать архивы изображений, которые не совсем сходны со входными данными. 3.Изображение обладает избыточностью двух измерений.
Известно 3 семейства алгоритмов, разработанные только для сжатия изображений, и неприменимы для других типов данных: 1.какие критерии можно предложить для сравнений алгоритмов; 2.какие классы изображений существуют; 3.какие классы приложений существуют. Изображение – статическое, растровое изображение, представляющее собой двумерный массив чисел, элементарная единица – пиксель.
Изображения бывают двух групп: с палитрой и без: -у изображений с палитрой в пикселе хранится число, являющееся индексом в некотором одномерном векторе цветов – палитре, например, gif, bitmap (16,32,256); -изображение без палитры бывает в какой-либо системе цветопредставления, например RGB, и градациях серого (0,255).
Для того чтобы корректно оценивать степень сжатия нужно ввести понятие класса изображений. Под классом будем понимать совокупность изображений, применение к которым алгоритма архивации дает качественно одинаковые результаты.
Классы: 1.изображения с небольшим количеством цветов (4-16) и большими областями, которые заполнены одним цветом, следовательно плавные переходы отсутствуют; 2.изображение с плавными переходами цветов; 3.фотореалистичные изображения; 4.фотореалистичные изображения с наложением деловой графики.
Классы приложений для компьютера: 1.требовательный ко времени процедуры архивации и дизархивации; 2.высокие требования к степени архивации и времени дизархивации; 3.высокие требования к степени архивации.
Требования приложений к алгоритмам компрессий: 1.высокая степень компрессии; 2.высокое качество изображения; 3.высокая скорость компрессии; 4.высокая скорость декомпрессии; 5.масштабирование изображений; 6.устойчивость к ошибкам; 7.требования для широковещательных сетей; 8.учет специфики изображения; 9.редактируемость; 10.малая стоимость аппаратной реализации.
Критерии сравнения алгоритмов: Характеристики алгоритмов зависят от конкретных условий, где поставлена алг степень. -компрессия от того на каком классе алгоритмов тестировался; -скорость алгоритмов зависит, для какой платформы разрабатывался. 1.степень сжатия (лучшая/средняя/худшая); 2.класс изображений, на который ориентирован алгоритм; 3.симметричность (отношение времени кодирования к декодированию); 4.фактор потери качества; 5.характерные особенности алгоритма и изображений, к которым их применяют. Статистические фильтры В результате их применения на выходе получим новое изображения, которое характеризует локальные статистические свойства данных. Хотя СТ оценки рассчитываются в небольшой окрестности каждого пикселя и обладают низкой значимостью из за небольшого объема выборки, но не смотря на это они могут быть полезны для решения задач по подавлению шума, выделение границ, выделение текстуры изображения….. в результате применения фильтра из изображения будут исключены те пиксели которые не починяются типичной статистике в текущем окне. Медианный фильтр позволяет удалить отдельные пиксели, которые соответствуют небольшому участку.
Морфологический фильтр В результате применения фильтров макс и мин значений результирующего изображения представляет карту локальных мин и максимумов исходного снимка. При использовании фильтров минимальных значений для бинарных изображений получается тот же результат что и при использовании дилатационного фильтра. Действие фильтра в максимальных значениях при обработке бинарных значений эквивалентно эррозионноному фильтру. Области применения этих фильтров. Пространственная сегментация и подавление шума. При морфологической обработке окно операции называют структурирующим элементом. Такой элемент может использоваться для сопоставления с эталонами или изменениями определенных форм.
Градиентные фильтры
В частности они подчеркивают границы. Градиент может, вычислен путем фильтрации изображения в двух перпендикулярных направлениях, потом их сложением для расчета градиента. Величина градиента определяется длинной составного вектора, а направление - углом между вектором и осью абсцисс. Наиболее распространенный фильтр Робертса, Собела и Превита. Фильтр Робертса
Фильтр Собела
Фильтр Превита
Выделение границ - задача бинарной классификации, которую можно решить с помощью пороговых значений модуля градиента. При этом слишком низкий порог может привести к выделению большого числа пикселей и появлению широких нечетких границ, а слишком высокий порог может привести к разбиению границ на несколько Фурье анализ Первая компонента имеет нулевую частоту (нулевая гармоника). Т.к. представляет собой среднее значение сигнала. Компонента с наименьшей нулевой частотой имеет тот же период, что и прямоугольный сигнал и называется основной гармоникой. Третья гармоника имеет частоту в 3 раза больше, чем в основной гармонике. 5-ая гармоника в 5 раз больше. Относительные веса этих компонент при их суммировании для синтеза исходного прямоугольного сигнала равны соответственно 1, 1/3, 1/5. По мере добавления новых компонент с больше частотой сумма их всё точнее будет описывать прямоугольный сигнал. Полная сумма всех компонент называется рядом Фурье прямоугольного периодического сигнала. Т.к. изображение у нас дискретное, то ряд Фурье представляет собой конечную сумму синусов и косинусов. Так же как и в 1-мерном случае ряда Фурье, исходное изображение воспроизводится полностью только при использовании всех членов разложения. С увеличением слагаемых повышается точность аппроксимации исходного изображения. Причём каждую такую сумму можно рассматривать как низкочастотную компоненту, а карту невязок – как высокочастотную. Нейронные сети Кохаиена Этап улучшение снимков 1б улучшение визуального восприятия снимков и 2б визуальный анализ. Улучшение снимков тоже самое, что и фильтрация (устранение вуали, дифференцирование усиление контраста, устранение строчности, битых пикселей и т.п.) Этап классификации 1в классификация объектов на снимке, 2в неконтролируемая классификация, 3в неконтролируемая, 6в дополнительные сведения, 4в классифицированные данные, 5в постобработка этих данных (группирование классов). В классификации используются такие методы как: IHS, (intensivety, huesituation интенсивность тон насыщенность), метод главных компонент (PCA), isodata (итеративная самоорганизующая методика анализа данных), неиронные сети прямого обратного распросатранения, кластерный анализ и т.п. Этап улучшение снимков 1б улучшение визуального восприятия снимков и 2б визуальный анализ. Улучшение снимков тоже самое, что и фильтрация (устранение вуали, дифференцирование усиление контраста, устранение строчности, битых пикселей и т.п.) Этап классификации 1в классификация объектов на снимке, 2в неконтролируемая классификация, 3в неконтролируемая, 6в дополнительные сведения, 4в классифицированные данные, 5в постобработка этих данных (группирование классов). В классификации используются такие методы как: IHS, (intensivety, huesituation интенсивность тон насыщенность), метод главных компонент (PCA), isodata (итеративная самоорганизующая методика анализа данных), неиронные сети прямого обратного распросатранения, кластерный анализ ит.п 47. Использование преобразования Фурье при распознавании и анализе изображений. Геометрическая коррекция.
На всех космических и аэроснимках присутствуют геометрические искажения.
Их причины, факторы: 1. Ракурс съемки. 2. Движение сканирующей аппаратуры. 3. Движение спутника. 4. Вариация высоты, скорость и ориентация спутника (круговая солнечная система, но высота будет различной, т.к. земной шар это не совсем шар, в каждой точке своя гравитационная постоянная). 5. Рельеф поверхности земли. 6. Вращение земли (происходит смаз и геометрическое искажение).
Цель геометрической коррекции – устранить искажение так, чтобы характеристики объектов на снимке как можно точнее соответствовали их фактическим характеристикам. Часть искажений относится к разряду систематических, эти искажения можно учесть, смоделировав движение сенсора и спутника относительно земли. Существуют и случайные искажения, для их исправления необходима геометрическая привязка снимка к известной и заданной системе координат и уже последующее геометрическое преобразование.
Типы геометрических искажений: 1. Перекос полосы съемки. Причина – перемещение спутника за время необходимое для поворота зеркала сканирующей системы. В результате полоса съемки под некоторым углом к трассе спутника, должен быть 90. 2. Вариация скорости вращения зеркал (разное расстояние между строками снимка). 3. Панорамные искажения. Площадь сканирующей плоскости пропорциональна не углу съемки, а тангенсу этого угла и поскольку данные регистрируются с каким-то шагом - это проводит к искажению вдоль снимка (разное расстояние между столбцами снимка). 4. Вариации скорости платформы. В результате вариации скорости платформы последовательные проходы зеркала сканирующей системы соответствуют участкам разной длины. 5. Вращение земли. Приводит к сдвигу полосы съемки и как следствие к искажению вдоль строк снимка.
6. Проекционные искажения. В некоторых случаях требуется, чтобы снимок представлял собой проекцию точек земной поверхности на тангенциальную плоскость. Причем линии проецирования должны быть ортогональны этой плоскости, соответственно, это будет приводит к искажению вдоль строк снимка.
Случайные искажения: 1. Вариация высоты орбиты. Изменение масштаба и пространственного разрешения снимка. 2. Ориентация. У ландсата одна из осей сканирующей системы всегда направлена перпендикулярна к поверхности земли и это приводит к случайным искажениям. 59. Линейное и нелинейное согласование детекторов. Глобальное линейное согласование детекторов - данные поступают от разных детекторов, должны иметь одинаковые значения пикселей и стандартные отклонения. На этом правиле основан очень простой алгоритм подавления полосового дума. Берется 1 из детекторов в качестве эталона, для него рассчитывается среднее значение пикселей и стандартное отклонение. Соответствующие характеристики всех остальных детекторов мы будем выравнивать по этим значениям. Преобразование для i детектора:
В результате этого преобразования все детекторы будут иметь те же отклонения что и эталонный детектор
Нелинейное согласование детекторов - применяется, когда линейная коррекция не является достаточной. Необходимо: нужно выбрать 1 из детекторов в качестве эталона, построить кумулятивные гистограммы для эталона и для того набора данных, который будем обрабатывать и сделать преобразование:
В результате кумулятивная гистограмма каждого детектора будет соответствовать гистограмме эталона, и все нелинейные эффекты будут учтены нашей формулой. Что понимается под компьютерной обработкой изображений и где она применяется, в какой степени и как используются при обработке данных ДЭЗ. · Компьютерная обработка изображения – обработка цифровых изображений с помощью компьютеров или других специализированных средств или устройств, которые построены на цифровых сигнальных процессорах. Фактически обработка изображения не только улучшает зрительное восприятие изображения, но и классификацию объектов выполняемую при анализе изображения. · ААДЗЗ широко применяется при анализе местности (лесхоз, с/х, военная разведка, МЧС) · При ком
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 621; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.117.128 (0.021 с.) |





 обратные преобразования: R=U+G; G=Y-[U+V/4]; B=V+G.
обратные преобразования: R=U+G; G=Y-[U+V/4]; B=V+G.


 (F(d)≥2
(F(d)≥2 



 gi,j – выходные значения пикселей. Либо g=fW.
gi,j – выходные значения пикселей. Либо g=fW. , W – центрирована внутри локального окна, в координате (0,0) и она будет принимать не нулевые значения в области ±Wx/2 ±Wy/2
, W – центрирована внутри локального окна, в координате (0,0) и она будет принимать не нулевые значения в области ±Wx/2 ±Wy/2