
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципи побудови багатоканальних систем зв’язкуСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Принципи побудови багатоканальних систем зв’язку Багатоканальна система зв’язку Канальні повідомлення rk1(t), rk2(t),…,rkN(t), які надходять від N незалежно від діючих джерел інформації за допомогою пристроїв, що називають канальними передавачами, перетворяться у відповідні канальні сигнали
Усі N канальних сигналів сумуються й отримується складне коливання:
де і = 1,2,3,..., N. У загальному передавачі це коливання знову перетвориться в сигнал, але тепер уже, як правило, високочастотний. Перетворення відображається оператором М, який описує формування сигналу Канальні передавачі, разом із сумуючим пристроєм, утворять пристрій ущільнення багатоканальної системи зв’язку. Загальний передавач, середовище і загальний приймач утворять загальний (груповий) канал зв’язку чи лінію зв’язку багатоканальної системи. За своєю структурою ця лінія нічим не відрізняється від звичайної одноканальної системи радіозв’язку. Коливання На вхід загального приймача попадає сигнал s`(t), який відрізняється від переданого, оскільки передача і прийом сигналів супроводжуються завадами і спотвореннями, тому для сигналу на вході приймача можна записати
де h(t) – деяке коливання, зумовлене дією адитивних завад і перекручувань; k(t) – коефіцієнт, що враховує дію мультиплікативних завад і перекручувань. У приймачі (рис. 2.1) відбувається зворотне перетворення сигналу в повідомлення
де n(t) – продукти перешкод і перекручувань на виході приймача.
Рис. 2.1 Отже, необхідна умова нормальної роботи лінії зв’язку – взаємна однозначність перетворень, здійснюваних операторами М і М-1, що характеризують відповідно роботу передавача і приймача. Коливання
Умова (2.5) відображає властивість l -го селектора відгукуватися лише на сигнали У канальних приймачах (рис. 2.1) відбувається зворотне перетворення канальних сигналів
Канальні селектори разом із канальними демодуляторами утворять пристрій поділу каналів багатоканальної системи зв’язку. Відповідно до принципу поділу сигналів у багатоканальних системах, їх підрозділяють на лінійні і нелінійні. Багатоканальна система лінійна, якщо поділ канальних сигналів відбувається в лінійних селекторах (фільтрах) із постійними чи змінними параметрами, у протилежному випадку її відносять до нелінійних систем. Основные виды импульсной модуляции и способы их получения Рис. 2.17
Диференційна система містить диференційний трансформатор з трьома обмотками, число витків яких дорівнює відповідно W 1, W 2, W 3 та опір Z б.к., який має назву балансний контур. Якщо W 1 = W 3, диференційна схема є симетричною. До клем 1 – 1 під‘єднується двопроводова лінія, до клем 2 – 2 – вхід каналу одного напрямку, до клем 4 – 4 – вихід каналу протилежного напрямку. Затухання диференційної системи в напрямку 4 – 2 повинно бути дуже великим, в ідеальному випадку – нескінченим. Розглянемо, в якому випадку виконується ця умова. Будемо вважати підсилювач зустрічного напрямку джерелом напруги із внутрішнім опором Z 4, який підключений до клем 4 – 4. Вхідний опір підсилювача прямого напрямку Z 2 підключений до клем 2 – 2, вхідний опір двопроводової лінії Z 1 – до клем 1 – 1. (рис. 2.18)
Рис. 2.18
Струми I 1 та I 2 проходячи по обмотках W 1 та W3 створюють в трансформаторі магнітні потоки, які направлені в протилежні сторони. Якщо ці потоки рівні, то ЕРС, яка наводиться в обмотці W 2 дорівнює нулю, та струм через опір Z 2 проходити не буде. Тобто затухання диференційної системи в напрямку 4 – 2 буде нескінченно великим. Так як W 1 = W 2, необхідно, щоб I 1 = I 3. Ця умова буде виконана, якщо Z 1 = Z б.к. Таким чином необхідно підібрати опір балансного контуру рівним вхідному опору лінії. Відповідна диференційна система має назву урівноваженої або збалансованої. На практиці виконання цієї умови неможливе, так як вхідний опір лінії Z 1 складним чином залежить від частоти. Тому в реальній диференційній системі затухання в напрямку 4 –2 завжди скінчене. Існують РП з використанням активних приладів, які мають переваги перед пасивними схемами. Генераторне обладнання АСП. Використання в сучасних АСП багаторазового та групового перетворення частоти потребує отримання великої кількості синусоїдних сигналів різних частот, які використовуються в якості несучих частот. Усі необхідні частоти виробляються генераторним обладнанням, яке є складовою частиною АСП. Основні вимоги до генераторів несучих частот - сталість їх частоти. Це зумовлено тим, що при використанні методу ОБП на перетворювач приймальної станції слід подавати несуче коливання, частота якого точно співпадає з частотою несучого коливання на передавальній станції. Припустимо, що на перетворювач приймальної станції подається несуче коливання з частотою wн + Dw, де Dw - відхилення частоти від номінального значення. На виході демодулятора замість сигналу з частотою W з’явиться сигнал з частотою W + Dw, тобто виникає зсув частот. Це викликає спотворення сигналу, яке погіршує чіткість мови, а при передаванні нетелефонних сигналів (телеграф, передавання даних) підвищує кількість помилок. Максимально допустиме розходження частот = ±0,5Гц. Відносна нестабільність частоти за таких умовах: Dw0/w0£ 10-6...10-8, де w0 - номінальне значення частоти. Застосування великої кількості високостабільних генераторів несучих частот зробило би генераторне обладнання дорогим і малонадійним (із-за складності). Тому в сучасних АСП використовують принцип гармонійної генерації несучих частот. Усі несучі частоти вибираються як гармоніки деякої основної частоти w0, яка виробляється високостабільним задавальним (опорним) генератором (ЗГ). У задавальному генераторі застосовують високодобротні кварцові резонатори, які розміщують в термостаті. Іноді весь ЗГ також ставлять в термостат. Частота ЗГ може перевищувати опорну, оскільки на високих частотах можливо виготовити більш якісні і економічні кварцові резонатори. У цьому випадку частота ЗГ ділиться подільником частоти (ДЧ), з виходу якого поступає частота w0=wз.г./ n, де n - коефіцієнт ділення.
Рис. 2.32
Гармоніки виділяються фільтрами Ф. Виділенні частоти к іw0 (де кі - номер відповідної гармоніки) використовуються в якості несучих частот.
Рис. 2.33
ФІНЧ - фільтри індивідуальних несучих частот. Надійність генераторного обладнання повинна бути виключно високою, оскільки від його надійності залежить робота всієї СП. Для забезпечення надійності генераторне обладнання звичайно резервується з автоматичним переключенням на резерв при виході із ладу яких-небудь вузлів. Звичайно один комплект генераторного обладнання забезпечує перетворення сигналів сотень і навіть тисяч стандартних каналів ТЧ, тобто велика кількість СП може використовувати одне й те ж генераторне обладнання. Отже, генераторне обладнання повинно бути уніфікованим. Для його розміщення передбачені спеціальні стійки уніфікованого генераторного обладнання (СУГО).
2.7.4. Обладнання спряження і лінійного тракту АСП. Спектри стандартних груп каналів, сформованих каналоутворюючим обладнанням, як правило, не співпадають з лінійним спектром СП. Тому вказані групи піддаються додатковому перетворенню за допомогою апаратури спряження (АС). АС є специфічною для кожної конкретної СП і забезпечує формування лінійного спектру із певного числа стандартних груп. Наприклад, в системі передавання К-60П вторинна група перетворюється в лінійний спектр 12...252 кГц в груповому перетворювачі частоти за допомогою несучої 564 кГц.
Рис. 2.34
Для більшого числа каналів ТЧ апаратура спряження забезпечує перетворення в лінійний спектр декількох стандартних груп, причому групи можуть бути різних типів. Наприклад, в СП К-1920П лінійний спектр 312...8524 кГц утворюється із 6 третинних і двох вторинних груп.
Рис. 2.35
При цьому одна ВГ і одна ТГ не перетворюються, а входять в лінійний спектр безпосередньо. Груповий сигнал, сформований обладнанням спряження, повинен бути переданий в лінію з певним рівнем, який визначається типом лінії, числом каналів та ін. Заданий рівень забезпечується підсилювачем передавання, який розташований на кінцевій станції. Підсилювач в тракті приймання підсилює сигнал, ослаблений при проходженні по лінії. Підсилювачі передавання і приймання входять у склад кінцевої апаратури лінійного тракту. Для забезпечення високої якості зв’язку необхідно контролювати стан лінійного тракту. Такий контроль звичайно здійснюється передаванням в лінію сумісно з основним груповим сигналом додаткових сигналів, які називаються контрольними частотами (КЧ). У тракті приймання протилежної кінцевої станції струми КЧ виділяються із лінійного спектру та керують роботою пристроїв автоматичного регулювання підсилення (АРП), за допомогою яких підтримуються незмінними характеристики лінійного тракту СП. Груповий сигнал при проходженні по лінії передавання піддається спотворенням, величина яких залежить від типу лінії і ширини спектру групового сигналу. Для усунення спотворень в тракті приймання кінцевої станції, а також на підсилювальних станціях вмикаються спеціальні коректуючі пристрої. Пристрій для введення і виділення струмів КЧ, коректуючи пристрої і пристрої АРП, розташовані на кінцевих станціях, входять у склад кінцевої апаратури лінійного тракту.
Рис. 2.36
В тракт передачі крім підсилювачів введені режекторні фільтри (РФ), які ліквідують вплив групового сигналу на струми КЧ. Через розв‘язуючий пристрій РП струми КЧ подаються на вхід підсилювача передавання. На вході підсилювача приймання включені коректуючи пристрої, які ліквідують спотворення групового сигналу, що виникають в лінії передавання. Пристрої виділення із лінійного спектра струмів КЧ і прилади АРП включені в коло зворотного зв’язку підсилювача приймання. На виході підсилювача приймання встановлені режекторні фільтри, які перешкоджають прониканню струмів КЧ на вхід перетворюючого обладнання. Кінцеве обладнання лінійного тракту, як і обладнання спряження, є специфічним для даної СП. Рис. 3.15 Аналогова частина декодера містить: - два однакових формувача еталонних сигналів ФЕС-А та ФЕС-В, які по призначенню аналогічним пристроям кодера; - диференційний підсилювач, який перетворює однополярні відліки сигналу АІМ у біполярний сигнал. Функціональними вузлами цифрової частини декодера є: - перетворювач послідовного двійкового коду у паралельний; - регістр з логікою керування, призначений для зберігання кодового слова на протязі інтервалу часу, необхідного для отримання заданої тривалості відліків вихідного АІМ сигналу; - цифровий експандер, який виконує перетворення 7-символьного коду у 12-символьний; - логічні елементи вибору ФЕС, які пропускають сигнали цифрового експандера на входи одного з ФЕС у залежності від значення символу у знаковому розряді.
Рис. 3.16 При цьому послідовно у часі передаються кодові групи, які відповідають відлікам квантованих АІМ сигналів різних каналів. Проміжок часу, який відводиться на передавання кодової групи одного каналу називається канальним інтервалом (КІ). Відповідні ЦСП називають системами ІКМ- часовим РК. Можливий інший спосіб формування групового сигналу, при якому поєднуються частотне розділення каналів та імпульсно-кодова модуляція. В цьому випадку методами ЧРК формується стандартна група каналів. Потім груповий сигнал піддається дискретизації за часом, квантуванню і кодуванню. В результаті відповідна група передається на протилежну кінцеву станцію у вигляді цифрової послідовності. Відповідні ЦСП називають системами ІКМ- частотним РК. На приймальному кінці в таких ЦСП цифрова послідовність декодується, а потім методами ЧРК груповий сигнал розділяється на канальні сигнали. Розглянемо структурну схему ЦСП з ІКМ - часовим РК (рис.3.17)
Рис. 3.17 Первинний сигнал (наприклад, телефонний) подається на фільтр нижніх частот, який обмежує спектр сигналу до 3,4 кГц. За допомогою дискретизатора (електронного ключа ЕК) здійснюється дискретизація за часом з частотою Fд. Електронні ключі різних каналів замикаються в моменти, які відрізняються один від одного на величину КІ tк = Тд/Nк де Т д =1/ F д - період дискретизації N к - число каналів. На виході дискретизаторів відліки з’єднуються, утворюючи груповий АІМ сигнал, який поступає на кодуючий пристрій КОД. На виході КОД утворюється груповий цифровий сигнал у вигляді імпульсної послідовності, тактова частота якої: fт = Fд m Nк де m - розрядність кодової групи. На виході тракту СП з ІКМ- часовим РК встановлюється перетворювач коду (ПК), який перетворює груповий цифровий сигнал так, щоб забезпечити його передавання по лінійному тракту з максимальною завадостійкістю і мінімальними спотвореннями. В тракті приймання прийнятий цифровий сигнал декодується і методами часового розділення за допомогою електронних ключів розподіляється по каналам СП. Встановлений на вході приймального тракту регенератор (Р) відновлює форму імпульсів ІКМ сигналу, змінену внаслідок впливу завад та спотворень в лінійному тракті, а також здійснює зворотне перетворення імпульсної послідовності, зміненої в ПК. Фільтр нижніх частот на виході тракту приймання кожного каналу виділяє первинний безперервний сигнал із спектру канального АІМ сигналу. Комутацією електронних ключів, роботою пристроїв кодера, декодера і регенератора керують сигнали, які виробляються генераторним обладнанням (ГО). Для правильного декодування і розділення сигналів на прийманні необхідно, щоб ГО передавальної і приймальної станцій працювали синхронно. Для цього в ІКМ сигнал, який передається в лінійний тракт, додається синхронізуючий сигнал у вигляді імпульсу або групи імпульсів, які несуть інформацію про частоту і моменти появи керуючих сигналів ГО. На приймальній станції синхросигнал виділяється приймачем ПрСС, поступає на ГО приймання і підстроює його під роботу ГО передавання протилежної станції.
17. Синхронізація в системах з ІКМ- часовим РК. В СП з КМ- часовим РК розрізняють тактову і циклову синхронізацію. Тактова синхронізація забезпечує рівність частот прямування імпульсів в пристроях обробки сигналів на передавальній і приймальній станціях, наприклад, в кодері і декодері. Відсутність тактової синхронізації може призвести, наприклад, до того, що декодер не закінчить декодування кодової комбінації попереднього каналу, коли на його вхід поступить кодова група наступного каналу. Для здійснення тактової синхронізації ГО приймальної станції керується тактовою частотою, яка виділяється із прийнятого ІКМ сигналу. ІКМ сигнал можна представити у вигляді суми регулярної і випадкової складових.
Рис. 3.18 Спектр регулярної складової G p(w) є дискретним і містить непарні гармоніки тактової частоти, в тому числі і першу. Цю гармоніку можна виділити вузькосмуговим фільтром. Випадкова складова має безперервний спектр G с(w). Повністю відділити гармоніку тактової частоти від усіх складових спектру ІКМ сигналу неможливо, оскільки у смугу перепускання вузькосмугового фільтру попадають складові неперервного спектра. Внаслідок цього форма сигналу виділеної тактової частоти відрізняється від синусоїдальної. Це може призвести до порушення тактового синхронізму і появи помилок при декодування. Циклова синхронізація. Циклом передавання називають сукупність сигналів, які передаються за час між двома сусідніми відліками сигналу одного каналу, тобто за період дискретизації. Таким чином, частота прямування циклів і частота дискретизації співпадають (F д = f ц). Для правильного розподілу декодованих АІМ сигналів по відповідним приймальним канальним трактам необхідно, щоб замикання електронних ключів даного каналу на приймальній і передавальній станціях відбувались одночасно. Для забезпечення синхронної і синфазної роботи ключів однойменних каналів в склад групового сигналу вводиться спеціальний синхросигнал. Цей сигнал володіє розпізнавальною ознакою, яка дозволяє відрізнити синхросигнал від інформаційних імпульсів. Такою ознакою може бути структура групи імпульсів, вибрана так, щоб вірогідність кодової комбінації такої ж структури була мала. Додатковою розпізнавальною ознакою синхросигналу є частота проходження, яка звичайно вибирається постійною, тоді як поява інформаційних сигналів носить випадковий характер. Так в системі передавання ІКМ-30 кодова група СС містить сім розрядів і має вигляд 0011011. Ця група передається в перших канальних інтервалах кожного парного циклу. Таким чином, частота прямування циклового синхросигналу удвічі менше частоти дискретизації і дорівнює 4 кГц. При включенні апаратури в роботу цикловий синхронізм встановлюється не одразу, а через певний проміжок часу, який має назву час входження у синхронізм. Цей час має бути достатньо малим (не більший ніж декілька мілісекунд). У протилежному випадку при випадковій втраті синхронізму може відбутися роз’єднання абонентів приладами АТС. Пошук стану синхронізму здійснюється послідовним контролем та порівнянням структури кодових груп групового сигналу з еталоном синхросигналу, який виробляється ГО приймальної станції. Якщо кодова група не відповідає еталону, приймач синхросигналу здійснює зсув послідовності керуючих імпульсів, які виробляються ГО приймальної станції, на один період тактової частоти. Такий зсув приймального ГО по відношенню до передаючого здійснюється, поки між кодовою групою та еталоном не встановиться однозначна відповідність, яка відповідає стану синхронізму у системі. В якості приклада розглянемо реалізацію циклової синхронізації у системі ІКМ-30. На рис. 3.19 представлена спрощена структура циклу цієї системи передавання.
Рис. 3.19 Цикл передавання відповідає рекомендації МККТТ G.732 та складається із 32 канальних інтервалів (КІ0 – КІ30). 30 канальних інтервалів призначені для передавання інформації, один – для передавання сигналу циклової синхронізації (ЦСС), один – для передавання сигналів керування та взаємодії (СКВ), які виробляються приладами АТС, та надциклового синхросигналу (НЦСС). Кожен КІ складається із восьми розрядів (Р 1 – Р 8). Частота прямування циклів дорівнює частоті дискретизації: F Ц = F Д = 8 кГц (T Ц = 125 мкс). Частота прямування канальних інтервалів: F К = F Ц k = 8 кГц ´ 32 = 256 кГц (T К ≈ 4 мкс); k – кількість канальних інтервалів. Тактова частота: F Т = F Ц k n = 8 кГц ´ 32 ´ 8 = 2048 кГц (T Т ≈ 0.5 мкс); n – кількість розрядів у кодовій групі. Цикловий синхросигнал передається у КІ0 у парних циклах на позиціях Р 2 – Р 8 та має вигляд 0011011, а у непарних циклах на позиції Р2 передається 1. Позиція Р 1 у КІ0 призначена для передавання дискретної інформації. У КІ1 – КІ15, КІ17 – КІ31 передається інформація, яка відповідає 30 сигналам ТЧ. При цьому КІ8 може відводиться для передавання дискретної інформації. У канальному інтервалі КІ16 на позиціях Р 1, Р 2 та Р 5, Р 6 передається по два СКВ для кожного сигналу ТЧ. Передавання СКВ здійснюється почергово в 15 циклах – для 1- та 16-го, 2- та 17-го, 3- та 18-го, …, 15- та 30-го сигналів ТЧ. Для правильного розподілу СКВ передбачено синхронізація роботи пристроїв СКВ. З цією метою 16 циклів об’єднуються у надцикл. У 16-му циклі у КІ16 на позиціях Р 1 – Р 4 передається надцикловий синхросигнал. Частота прямування надциклів: F НЦ = F Ц / 16 = 500 Гц. З такою частотою передається кожний СКВ. На позиціях Р 3, Р 6 КІ0 у непарних циклах та Р 6 КІ16 Ц0 формуються сигнали про аварію приймальної частини ІКМ – 30, які передаються у приймальну частину апаратури. Пошук стану синхронізму здійснюється у два етапи: спочатку встановлюється стан циклового, а потім надциклового синхронізму. Пошук циклового синхронізму здійснюється у зоні, яка дорівнює двом циклам передавання (що відповідає періоду прямування синхросигналу) шляхом послідовного аналізу 7-розрядних кодових комбінацій на відповідність синхросигналу. Якщо група, яка аналізується, відрізняється від синхросигнала, здійснюється зсув на одну позицію, та наступною аналізується 7-розрядна кодова група, яка містить шість символів попередньої групи. Такий аналіз здійснюється, поки кодова комбінація не буде аналогічна синхросигналу. Наступною аналізується комбінація, яка розташована на таких саме позиціях циклу передавання, але зі зсувом на період прямування синхросигналу. Якщо формування кодової групи, аналогічної синхросигналу, викликано випадковим сполученням у груповому сигналі одиниць та нулів інформації (ложна синхрогрупа), у наступному періоді на позиціях, які аналізуються, з’явиться кодова група, яка відрізняється від синхрогрупи, та відбудеться зсув. Такий процес послідовного аналізу буде продовжуватись, поки не буде знайдений істиний цикловий синхросигнал. Для того, щоб при спотворенні символів циклового синхросигналу не почався процес пошуку синхронізму, вводиться накопичувач по виходу із синхронізму, який забезпечує перехід к пошуку синхронізму тільки після чотириразового підряд спотворення синхросигнала, імовірність чого достатньо мала. У процесі пошуку синхросигналу, для того, щоб не збільшувати час пошуку, цей накопичувач відключається, та включається знов тільки після встановлення стану циклового синхронізму. Наявність циклового синхронізму фіксується накопичувачем по входу у синхронізм, який спрацьовує після дворазового підряд знаходження синхросигналу на одних та тих саме позиціях у циклі передавання. Імовірність помилкового спрацювання накопичувача по входу у синхронізм достатньо мала. Після фіксації наявності циклового синхронізму починається процес пошуку надциклового синхросигналу, який передається комбінацією 0000 в нульовому циклі у КІ16 на позиціях Р 1 – Р 4. Ця комбінація може бути легко впізнана, поскільки в усіх циклах (крім нульового) у КІ16 на позиції Р 4 передається 1.
Рис. 3.20 Приймач синхросигналу містить приймач циклового синхросигналу, приймач надциклового синхросигналу та розподільник СКВ. У приймачі циклового синхросигналу груповий сигнал надходить на вхід регістра зсуву Р З. Кожна комбінація символів, яка аналогічна цикловому синхросигналу, обумовлює наявність імпульсів на виході дешифратора ДШ1. Якщо передавальна та приймальна частини апаратури знаходяться у стані циклового синхронізму, сигнал з виходу дешифратора співпадає з часом з сигналом на виході елемента І1, який відповідає часовій позиції Р 8 КІ0 у кожному парному циклі. При цьому на виході логічного елемента НІ1, який з’єднаний з накопичувачем по виходу із синхронізму, сигнал відсутній. На виході І2, який виконує функції накопичувача по входу у синхронізм, з’являється сигнал скидання у нульовий стан перших трьох комірок накопичувача по виходу із синхронізму. Остання (четверта) комірка скидається у нульовий стан безпосередньо з виходу ДШ1. В результаті накопичувач по виходу із синхронізму при роботі системи у режимі циклової синхронізації буде повністю розряджений. Помилкові синхрогрупи, які містяться у груповому сигналі, не співпадають з часом з сигналом на виході логічного елемента І1, та тому не викликають появу сигналів помилки на вході накопичувача по входу у синхронізм. При одиночних спотвореннях синхрогруп сигнал з виходу логічного елементу І1 проходить через відкритий логічний елемент НІ1 на вхід накопичувача по виходу із синхронізму. Але при цьому накопичувач не встигає повністю зарядитися, та збою циклового синхронізму не відбувається. Сигнал з виходу ДШ1, який відповідає першій неспотвореній синхрогрупі, через логічний елемент І2 скине накопичувач у нульовий стан. При відсутності синхронізму у чотирьох наступних підряд циклах (періодів прямування циклового синхросигналу 0.25 мс) накопичувач по виходу із синхронізму заповниться та здійснює заборону декодера та ввімкнення сигналу аварії циклової синхронізації, а також через логічний елемент АБО1 – заборону приймача СКВ та включення сигналів аварії системи надциклової синхронізації. Одночасно відкривається логічний елемент І3, та перший імпульс, обумовлений прийманням помилкової синхрогрупи, встановить у нульовий стан подільник частоти у ГО1 та останню комірку у накопичувачі по виходу із синхронізму. В результаті наступне впізнання групового синхросигналу буде проводитись на цих саме позиціях, але у наступному циклі (через 0.25 мс). Якщо повторно на цих позиціях помилкова синхрогрупа не сформується, сигнал з виходу логічного елементу І1 знов заповнить накопичувач по виходу із синхронізму, відкриється логічний елемент І3 та пошук синхрогрупи продовжиться. Якщо на позиціях, які аналізуються помилкова синхрогрупа з’явиться два рази підряд, імпульс з виходу ДШ1 пройде через відкритий логічний елемент І2, який виконує функції накопичувача по входу у синхронізм, та скине накопичувач по виходу із синхронізму у нульовий стан. Пошук синхрогрупи у даному випадку буде продовжено тільки після чотириразової підряд появи на позиціях, які аналізуються, кодових груп, які відрізняються від синхросигналу. Однак імовірність помилкового заповнення накопичувача по входу у синхронізм достатньо мала. Після дворазового підряд знаходження істіної синхрогрупи сигнал з виходу логічного елемента І2 скине накопичувач по виходу із синхронізму в нульовий стан. Приймач надциклового синхросигналу будується аналогічно приймачу циклового синхросигнала. Кожна комбінація символів, аналогічна надцикловому синхросигналу, викликає появу імпульсів на виході ДШ2. Контроль надциклового синхросигналу на відповідність часовому положенню сигналу, який формується логічним елементом І4, здійснюється тільки у режимі циклової синхронізації. Це забезпечується логічним елементом НІ2, на вхід якого подається сигнал з накопичувача по виходу із циклового синхронізму. При наявності циклового та надциклового синхронізму на виході логічного елементу І5 сигнал відсутній, а з виходу логічного елемента І6, який виконує функцію накопичувача по входу у синхронізм, надходить сигнал скидання першої комірки накопичувача по виходу із надциклового синхронізму. При відсутності надциклового синхронізму у двох підряд надциклах на виході останньої комірки накопичувача виробляється сигнал заборони приймачів СКВ та аварії у системі надциклової синхронізації. Одночасно відкривається логічний елемент І5 та перший імпульс, який з’явився на виході ДШ2, при наявності циклового синхронізму встановить подільник частоти у ГО2 та другу комірку накопичувача у нульовий стан. При повторному формуванні надциклового синхросигналу на цих же позиціях через логічний елемент І6 скидається у нульовий стан перша комірка накопичувача. Крім вказаних функцій, у приймачі синхросигналу за допомогою логічних елементів І із групового сигналу виділяються СКВ.
18 Лінійний тракт цифрової системи передавання з ІКМ – часовим розділенням каналів. 3.9.1. Формування лінійного сигналу. Однополярний дворівневий (1 чи 0) імпульсний цифровий сигнал, який з’являється на виході кодера повинен бути переданий по лінії з мінімальними спотвореннями, тобто форма імпульсів повинна бути по можливості збережена. Для передавання прямокутних імпульсів без спотворень необхідна нескінченно широка смуга частот. Однак, будь-який реальний лінійний тракт має обмежену смугу частот. Знизу ця смуга обмежена наявністю лінійних трансформаторів. Зверху - тим, що вгамування будь-якої лінії зв’язку зростає з ростом частоти. Форма імпульсів може також спотворюватись під впливом адитивних завад, тобто завад, які в лінійному тракті сумуються разом з сигналом. До адитивних відносяться власні завади лінії передавання і підсилювачів, завади від лінійних переходів, атмосферні та інші зовнішні завади. Обмеження смуги перепускання зверху призводить до зміни форми імпульсів і зростанню їх тривалості, що може призвести до помилок при декодуванні ІКМ сигналу. Міжсимвольні завади, які викликані обмеженням смуги тракту передавання зверху називають завадами першого роду.
Рис. 3.22 Обмеження смуги частот знизу викликає спотворення імпульсів, які призводять до міжсимвольних завад другого роду.
Рис. 3.23 Ці спотворення особливо великі в тому випадку, коли в спектрі імпульсної послідовності є постійна складова, наприклад при передаванні однополярних імпульсів. Міжсимвольні завади другого роду викликаються тривалими викидами протилежної полярності. Вони можуть призводити не тільки до спотворень сигналу в межах одного каналу ЦСП, але й до взаємного впливу між каналами. В лінійному тракті ЦСП на форму імпульсів здійснюють вплив власні завади вузлів тракту і кабелю, а також завади від лінійних переходів з сусідніх пар кабелю. Нелінійні завади в каналах ЦСП з ІКМ- часовим РК несуттєві, оскільки при часовому розділенні каналів відмінна ознака сигналу - час його появи. Будь-яке нелінійне обладнання, яке змінює форму лінійного сигналу, не може змінити проміжок часу, на протязі якого сигнал відмінний від нуля. Для зменшення впливу спотворень імпульсів і завад необхідно відповідним чином формувати цифровий сигнал на передавальній станції. Цей сигнал в системах ІКМ- часовим РК повинен задовольняти наступним вимогам: 1. Лінійний сигнал не повинен містити постійну складову. Виконання цієї вимоги знижує міжсимвольні завади другого роду, оскільки зменшується спотворення сигналу за рахунок обмеження смуги частот знизу. 2. Енергія сигналу повинна бути сконцентрована у можливо більш вузькій смузі частот, тобто енергія повинна швидко зменшуватись з ростом частоти. При цьому обмеження смуги частот лінійного тракту зверху в меншому ступеню впливає на форму імпульсів, а також дозволяє зменшити вплив власних завад шляхом обмеження смуги перепускання тракту. 3. Структура лінійного цифрового сигналу повинна бути такою, щоб із його спектру можна було виділити коливання тактової частоти. Це необхідно для забезпечення тактової синхронізації обладнання передавальної і приймальної станцій. Амплітуда першої гармоніки максимальна при довжині імпульсів tn = T/2 (T - період тактової частоти). Таким звичайно вибирають tn. Смуга частот лінійного тракту, яка необхідна для задовільного відтворення прямокутних імпульсів залежить від тривалості імпульсів і може бути приблизно оцінена: D f» 0,5...0,6/tn = 1,0...1,2/ Т = (1...1,2) f т Однополярна послідовність двїйкових імпульсів містить у спектрі постійну складову. Низькочастотні складові спектру мають велику потужність, складові спектру в районі тактової частоти також порівняно великі. Таким чином, однополярний сигнал не задовольняє першим двом із наведених вимог, і його використ
|
||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 764; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.122.95 (0.012 с.) |

 . Перетворення – взаємно однозначне і може бути подати деяким оператором
. Перетворення – взаємно однозначне і може бути подати деяким оператором  , тобто для i-го каналу можна записати
, тобто для i-го каналу можна записати . (2.1)
. (2.1) , (2.2)
, (2.2) , що далі випромінюється в середовище.
, що далі випромінюється в середовище. , що являє собою суму канальних сигналів, які часто називають модульованими несучими, можна розглядати як складне повідомлення і називати лінійним багатоканальним повідомленням (груповим сигналом), а коливання s(t), що виходить на виході передавача сигналом.
, що являє собою суму канальних сигналів, які часто називають модульованими несучими, можна розглядати як складне повідомлення і називати лінійним багатоканальним повідомленням (груповим сигналом), а коливання s(t), що виходить на виході передавача сигналом. , (2.3)
, (2.3) . Робота приймача характеризується деяким оператором М-1, оберненого оператору М. Без врахування мультиплікативних шумів на виході приймача
. Робота приймача характеризується деяким оператором М-1, оберненого оператору М. Без врахування мультиплікативних шумів на виході приймача (2.4)
(2.4)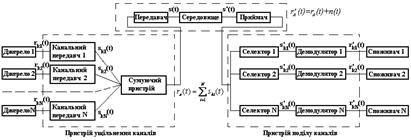
 далі надходить на пристрій поділу, де поділ і демодуляція канальних сигналів здійснюються канальними приймачами. Селекторні пристрої можуть бути лінійними чи нелінійними, з постійними або зі змінними параметрами. Якщо дія кожного канального селектора характеризується деяким оператором
далі надходить на пристрій поділу, де поділ і демодуляція канальних сигналів здійснюються канальними приймачами. Селекторні пристрої можуть бути лінійними чи нелінійними, з постійними або зі змінними параметрами. Якщо дія кожного канального селектора характеризується деяким оператором  , тоді процес поділу є дією оператора поділу
, тоді процес поділу є дією оператора поділу  і на виході селектора l-го каналу виділяється відповідний канальний сигнал
і на виході селектора l-го каналу виділяється відповідний канальний сигнал  , a всі інші сигнали затримуються. За відсутності завад процес поділу описується співвідношеннями:
, a всі інші сигнали затримуються. За відсутності завад процес поділу описується співвідношеннями: . (2.5)
. (2.5) цього каналу і не реагувати на сигнали всіх інших каналів. Величина та характер відгуку повинні бути однозначно зв’язані з відповідним канальним сигналом і зовсім неважливо який вигляд має відгук селектора
цього каналу і не реагувати на сигнали всіх інших каналів. Величина та характер відгуку повинні бути однозначно зв’язані з відповідним канальним сигналом і зовсім неважливо який вигляд має відгук селектора  у повідомлення
у повідомлення  . Дія цих приймачів характеризується оператором
. Дія цих приймачів характеризується оператором  , що для забезпечення взаємної однозначності перетворення повинен бути оберненим оператору
, що для забезпечення взаємної однозначності перетворення повинен бути оберненим оператору  :
: . (2.6)
. (2.6)
 Гармоніки основної частоти утворюються в пристрої, який називається генератором гармонік (ГГ). ГГ - це нелінійне обладнання, яке викривлює форму синусоїдального сигналу.
Гармоніки основної частоти утворюються в пристрої, який називається генератором гармонік (ГГ). ГГ - це нелінійне обладнання, яке викривлює форму синусоїдального сигналу. Приклад:
Приклад:
 Приклад: спрощена схема кінцевого обладнання лінійного тракту СП К‑60П:
Приклад: спрощена схема кінцевого обладнання лінійного тракту СП К‑60П:
 Розглянемо структурну схему циклової синхронізації приймальної частини системи ІКМ – 30 (рис 3.20).
Розглянемо структурну схему циклової синхронізації приймальної частини системи ІКМ – 30 (рис 3.20).


