Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Глава 3. Механические передачи трением и зацеплениемСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
3.1. Общие сведения о передачах 3.1.1. Назначение и классификация передач. Применение передач в узлах артиллерийской техники Из механических передач самые распространенные передачи вращательного движения. Вращательное движение легко сделать непрерывным, проще и легче осуществить в виде компактной конструкции, легче обеспечить равномерность хода и уменьшить потери на трение. Механические передачи классифицируют по различным признакам. По конструктивному признаку: зубчатые, винтовые, планетарные, волновые, червячные, цепные, у которых движение передается за счет зацепления; фрикционные и ременные, у которых движение передается за счет сил трения. По характеру изменения скорости: понижающие (ω1 > ω2) и повышающие (ω1 < ω2). По числу передаточных ступеней, т.е. отдельных передач, взаимно связанных и одновременно участвующих в передаче и преобразовании движения: одно- и многоступенчатые. Передачи могут быть закрытые, заключенные в корпус, обеспечивающие герметизацию и постоянную смазку, и открытые. Развернутая передача, в которой энергия от одного двигателя передается нескольким исполнительным органам, называется многопоточной. Во всех механических передачах различают два основных вала (звена): входной и выходной. Между этими валами в многоступенчатых передачах располагаются промежуточные валы. Валы, передающие вращающий момент, называют ведущими, а валы, приводимые в движение от ведущих, называют ведомыми. Цилиндрические, конические и червячные передачи нашли широкое применение в подъемных и поворотных механизмах артиллерийских орудий, винтовые передачи – в приборах наведения артиллерийских систем, планетарные передачи – в электромеханических приводах боевых машин САУ, РСЗО и ПТРК. Ременные и цепные передачи используются для привода агрегатов двигателей автомобилей и самоходных артиллерийских установок. 3.1.2. Основные кинематические и силовые отношения Основными кинематическими и силовыми параметрами передач (рис.3.1) являются: мощность на выходе Рвых (Р2) (Вт); быстроходность, которая выражается угловой скоростью вращения выходного вала ωвых (ω2) (рад/с) или частотой вращения nвых (n2) (с-1 или мин-1). Угловая скорость и частота вращения связаны между собой соотношением
Рис.3.1. Кроме основных различают производные характеристики, которыми часто пользуются при расчетах. Коэффициент полезного действия (КПД). Для многоступенчатой передачи, состоящей из нескольких отдельных последовательно соединенных передач, общий КПД определяется как произведение КПД отдельных передач и других звеньев привода, где имеются потери мощности (подшипники, муфты и др.). Вращающий момент Т = Р/ω, Н·м (3.1) Вращающий момент Т1 является моментом движущих сил, приложен к ведущему валу, его направление совпадает с направлением вращения вала. Момент Т2 – момент сил сопротивления, приложен к ведомому валу, его направление противоположно направлению вращения вала. Передаточное отношение – важнейший кинематический параметр передачи. Передаточное отношение ί – представляет отношение угловой скорости ω1 ведущего звена к угловой скорости ω2 ведомого в направлении потока мощности от ведущего звена к ведомому, т.е. ί = ω1/ω2 = n1/n2 (3.2) Для привода с многоступенчатой передачей общее передаточное отношение ίоб равно произведению передаточных отношений всех его передач (ступеней), т.е. ίоб = ί1 ί2… ίn. (3.3) При ί > 1, ω1 >ω2 (n1 > n2) – передача понижающая; при ί < 1, ω2 > ω1 (n2 > n1) – передача повышающая. С учетом КПД, передаточного отношения и вращающего момента Т1 на ведущем валу вращающий момент на ведомом валу определяется по формуле Т2 = Т1 ί η. (3.4) К характеристикам передач относятся размеры, компактность, масса, стоимость, надежность. В табл.3.1 приведены ориентировочные значения основных параметров одноступенчатых механических передач. Таблица 3.1
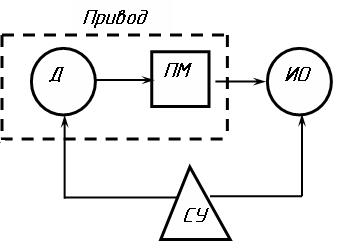
3.1.3. Общий расчет привода Приводом называют устройство, приводящее в движение исполнительный (рабочий) орган машины или механизма. Привод (рис.3.2.) включает источник энергии (двигатель) и передаточный механизм (передачу). Для согласования работы двигателя и исполнительного органа применяют систему управления. Привод может быть механический, электромеханический, гидравлический, пневматический.
Рис. 3.2 Передаточным механизмом электромеханического привода является механическая передача. Механические передачи выполняют функции передачи и преобразования движения, изменения и регулирования скорости распределения потоков мощности между исполнительными органами. Например, в автомобилях и других транспортных машинах требуется изменять величину скорости и направление движения, а на подъемах и при трогании с места необходимо в несколько раз увеличить вращающий момент на ведущих колесах. Сам же автомобильный двигатель не может выполнить эти требования, так как он работает устойчиво только в узком диапазоне изменения величины вращающего момента и угловой скорости. При выходе за пределы этого диапазона двигатель останавливается. В редких случаях, когда угловые скорости валов двигателя и рабочего органа машины совпадают, применяют непосредственное их соединение муфтой (например, в приводах вентиляторов, насосов, турбин и т.п.). Таким образом, выбор типа механической передачи для привода является одной из наиболее распространенных инженерных задач, решаемых при разработке проекта машины. Для заданной или обоснованно выбранной принципиальной кинематической схемы привода общий расчет включает: выбор электродвигателя, кинематический и силовой расчет привода. Исходными данными для расчета являются: кинематическая схема привода; мощность на выходном валу Рвых (Вт); частота вращения выходного вала nвых (мин-1); ресурс работы (ч). Выбор электродвигателя Мощность выбираемого серийного электродвигателя должна быть не ниже расчетной. Из существующих типов двигателей выбирают преимущественно асинхронные электродвигатели общего применения. Последовательность общего расчета рассмотрим на примере электромеханического привода с двухступенчатым цилиндрическим редуктором (рис.3.3).
Рис.3.3 Требуемую мощность электродвигателя (мощность на входном валу) определяют из выражения Рвх = Р1 = Рвых /η, (3.5) где η = η1 η2 ηкn ηr – КПД привода; здесь η1 и η2 – КПД ступеней, учитывающие потери в зацеплении данной передачи (табл.3.1); ηn – коэффициент, учитывающий потери энергии в паре подшипников качения (ηп = 0,99); к – число пар подшипников качения; ηr– коэффициент, учитывающий потери энергии на разбрызгивание и перемешивание масла в корпусе редуктора (ηr = 0,98…0,99). По величине Рэд ≥ Рвх можно выбрать несколько марок двигателей, которые отличаются частотой вращения вала. Предпочтение отдается той марке двигателя, частота вращения nэд которого позволяет реализовать в кинематической схеме передаточное отношение передач.
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 870; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.209.163 (0.012 с.) |

 , если n, мин-1.
, если n, мин-1.