
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сложение вращений твердого тела вокруг пересекающихся осейСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Пусть твердое тело совершает вращательное движение вокруг подвижной оси с угловой скоростью
а б в г Рис.7. Определение положения мгновенного центра скоростей
Вектор 1.5.2. Сложение вращений твердого тела вокруг параллельных осей Если оси относительного и переносного вращения параллельны друг другу, то тело совершает плоское движение, а его абсолютная угловая скорость равна
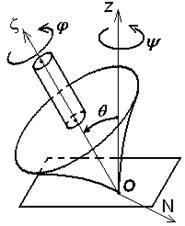
1.5.3. Сферическое движение твердого тела - это такое его движение в пространстве, при котором одна точка тела остается неподвижно. Таковым является, например, движение волчка (рис. 8). Траектория каждой точки тела лежит на сфере с центром в неподвижной точке в общем случае есть результат сложения его вращений вокруг трех осей. Тело имеет 3 степени свободы. Обобщенными координатами могут служить углы Эйлера: угол собственного вращения Перемещение тела в заданное положение из начального положения представляется как последовательность прецессии, затем нутации и, наконец, собственного вращения. Направляющий орт 1.5.4. Скорость и ускорение точки тела при сферическом движении Угловая скорость тела равна векторной сумме угловых скоростей ротации, прецессии и нутации:
Рис.8. Углы Эйлера
Линия действия вектора
где Ускорение точки тела равно
«Осестремительное» ускорение Перемещение твердого тела в заданное положение из начального положения можно осуществить одним поворотом вокруг некоторой оси. Конечные повороты можно складывать, но они, в отличие от бесконечно малых вращений, не коммутативны: результат зависит от порядка поворотов. Конечные повороты описывают в терминах кватернионов – гиперкомплексных чисел, имеющих вещественную часть (характеризующую величину угла поворота) и три мнимые части, задающие направление оси поворота. 1.5.5. Движение свободного твердого тела Для исследования свободного движения тела некоторая точка С тела выбирается в качестве полюса. С полюсом С связывают подвижную систему отсчета
Введение в динамику. Статика твердого тела Введение в динамику 2.1.1.Аксиомы классической механики А) Первый закон Ньютона (принцип инерции). Б) Второй закон Ньютона в общем виде формулируется по отношению к материальной точке переменной массы
Основное уравнение динамики материальной точки постоянной массы:
Второй закон Ньютона, как и другие уравнения динамики, формулируется («по умолчанию») относительно инерциальной системы отсчета (существование таких систем отсчета постулируется первым законом Ньютона). В качестве инерциальной системы берут обычно систему отсчета, связанную с Землей («геоцентрическая» система отсчета). С большей точностью второй закон Ньютона выполняется по отношению к системе отсчета, связанной с плоскостью эклиптики («гелиоцентрическая»), и еще точнее - относительно системы отсчета, связанной с «удаленными звездами». В) Дополнение ко второму закону Ньютона (принцип независимости действия сил). Следствие: запись основного уравнения динамики точки в виде
Г) Третий закон Ньютона (принцип соответствия действия и противодействия): силы взаимодействия между материальными точками 1 и 2 связаны уравнением Простейшими следствиями законов Ньютона являются теоремы динамики. Они выражают связь между мерами механического движения и соответствующими им мерами действия сил. Теоремы динамики являются формами законов сохранения (импульса, момента импульса и энергии). Законы сохранения в свою очередь отражают симметрию пространства и времени классической механики: однородность пространства, изотропность пространства, однородность времени. 2.1.2.Классификация сил, действующих на точки механической системы А) Задаваемые («активные») силы и реакции связей. Задаваемые – силы, действующие на точки исследуемой механической системы со стороны тех тел или силовых полей, которые непосредственно не ограничивают подвижность системы. Активная сила задается или непосредственно некой инструкцией, или указанием на какой-то физический закон (являющийся следствием не законов Ньютона, а иной физической теории). Реакции связей - это силы, характеризующие действие связей на исследуемый объект. В задачах механики реакции связей обычно являются неизвестными величинами. Б) Внешние и внутренние силы Внешние силы ( Внутренние силы ( Помимо вышеупомянутых двух основных способов классификации, в частных ситуациях применяют и иные. Так, например, силы, действующие на сплошное (континуальное) тело, подразделяются на объёмные и поверхностные, сосредоточенные силы и распределенные нагрузки. 2.1.3. Момент вектора относительно полюса (механический момент) Момент вектора
Здесь приложения вектора Латинское слово «момент» означает некое действующее начало, существенное качество какого-то явления. Момент силы характеризует вращательный эффект действия силы. Вектор момента силы направлен перпендикулярно плоскости Величина момента силы равна произведению величины силы на плечо:
Плечо
Рис. 9. Момент вектора
Аналогично определяется момент вектора
Пусть
2.1.4. Момент вектора
Графо-аналитический расчет момента вектора 1) строим плоскость
Рис. 10. К расчету момента вектора
2) строим проекцию 3) находим плечо 4) Моменту вектора
Знак момента определяется по правилу правого винта (часовой стрелки): если направление вектора Момент вектора относительно оси равен нулю, если вектор и ось компланарны (линия действия вектора параллельна оси или пересекает её). 2.1.5.Главный вектор и главный момент системы сил Множество сил Главный вектор системы сил: Главный момент системы сил относительно данного полюса
Главный вектор и главный момент системы внутренних сил равны нулю (следствие третьего закона Ньютона). 2.1.6. Меры механического движения А) Количество движения материальной точки Мера механического движения механической системы равна сумме мер движения фрагментов системы. Количество движения механической системы, состоящей из
Количество движения механической системы можно найти как произведение общей массы системы на скорость центра масс (см. Ч. 2). Б) Кинетический момент материальной точки относительно неподвижного полюса О (момент количества ее движения относительно полюса):
Кинетический момент механической системы относительно полюса О
В) Кинетическая энергия материальной точки
Кинетическая энергия механической системы
2.1.7. Меры действия сил А) Импульс силы Элементарный импульс силы (импульс действия силы за бесконечно малое время Суммарный элементарный импульс множества сил, приложенных к точкам механической системы:
где Импульс силы
Б) Момент силы относительно полюса или оси (см. п. 2.1.4) В) Работа и мощность силы Элементарная работа силы
где Работа на «конечном» перемещении точки из положения
Мгновенная мощность силы Если элементарная работа является полным дифференциалом работы как функции 2.1.8. Мощность и элементарная работа сил, действующих на твердое тело Суммарная мощность всех сил, действующих на тело, есть величина
Скорость
где Суммарная мощность сил будет равна
Определив вектор бесконечно малого поворота тела как
Рис. 11. Полюс
Поскольку главный вектор и главный момент внутренних сил равны нулю, то эти силы не совершают работы при движении твердого тела. Работа складывается из работы главного вектора внешних сил при поступательном движении тела (вместе с полюсом При вращательном движении тела вокруг неподвижной оси 2.1.9.Теоремы динамики механической системы в дифференциальной форме можно записать как суждения о скоростях изменения мер движения:
Подчеркнем, что изменение кинетической энергии определяется мощностью как внешних Статика твердого тела 2.2.1. Эквивалентные друг другу системы сил Количество движения и кинетический момент твердого тела выражаются через скорость Пусть система сил состоит из одной силы. Перенеся силу вдоль линии ее действия, получим новую систему из одной силы, эквивалентную исходной системе. Поэтому сила, приложенная к твердому телу, является скользящим вектором. 2.2.2. Векторные уравнения равновесия твердого тела Если твердое тело покоится в течение некоторого промежутка времени, то меры механического движения его сохраняют в этом промежутке постоянные значения, равные нулю. Тогда из теорем динамики получаем необходимые условия равновесия твердого тела, накладываемые на приложенные к нему силы (уравнения равновесия системы сил):
Внутренние силы на состояние твердого тела как единого объекта не влияют, поэтому индекс «Е» (Exterior) в записях уравнений равновесия по умолчанию опускают. 2.2.3. Классификация систем сил, действующих на твердое тело, по взаимному расположению линий их действия: А) пространственные и плоские системы сил, Б) сходящиеся системы сил (линии действия всех сил пересекаются в одной точке); системы параллельных сил (линии действия всех сил параллельны друг другу); произвольные системы сил. Например: «пространственная система параллельных сил». 2.2.4. У равнения равновесия твердого тела (уравнения равновесия системы сил) в проекциях на оси декартовой системы координат Уравнения равновесия произвольной пространственной системы сил
Возможна краткая форма записи: Уравнения равновесия произвольной плоской системы сил
В уравнении моментов для плоской системы сил индекс «z» по умолчанию опускают. Знаки моментов определяют по правилу часовой стрелки: если сила «стремится» повернуть плоскую фигуру вокруг данного полюса против часовой стрелки, то момент считают положительным, иначе – отрицательным. Если полюс лежит на линии действия силы, то момент равен нулю. Можно составить уравнения равновесия плоской системы сил иначе: - два уравнения моментов относительно разных полюсов и одно уравнение проекций сил на ось, не перпендикулярную прямой, содержащей полюсы; - три уравнения моментов относительно трех разных полюсов, не лежащих на одной прямой. 2.2.5. Пара сил – система двух сил, равных по величине, направленных в противоположные стороны и имеющих не совпадающие линии действия. Главный вектор такой системы двух сил равен нулю, а главный момент относительно любого полюса есть один и тот же вектор Действие на твердое тело пары сил характеризуется действием на него силового момента со стрелками или круговой стрелкой.
Рис. 12. Пара сил
2.2.6. Равнодействующая системы сил - это одна сила, эквивалентная данной системе сил. Если главный момент системы относительно полюса 2.2.7. Приведение системы сил к полюсу. Инварианты статики твердого тела Систему сил, приложенных к твердому телу, можно интерпретировать как совокупность приложенной в полюсе
где При перемене полюса приведения сохраняет значение проекция Систему сил можно привести в общем случае к динаме; в частных случаях - к равнодействующей или к паре. Динама – это совокупность главного вектора и главного момента, в случае, когда они направлены вдоль одной прямой. Эта прямая называется осью динамы или центральной винтовой осью. В случае равновесия системы сил главный вектор и главный момент относительно любого полюса равны нулю. 2.2.8. Центр тяжести тела - такая точка заданы веса
где Абсцисса центра тяжести сплошного (континуального) тела, имеющего плотность Центр тяжести
Рис. 13. Выпуклое замыкание плоской фигуры
2.2.9. Координаты центра тяжести однородного тела А) Тело составлено из фрагментов:
Здесь роль весов играют объёмы Б) Абсцисса центра тяжести сплошного тела равна:
В) Центр тяжести симметричного однородного тела лежит в плоскости симметрии или на оси симметрии или совпадает с центром симметрии. 2.2.10. Теоремы Гюльдена А) Пусть отрезок кривой образовал поверхность вращения (рис. 14, а). Тогда площадь её боковой части равна
где Б) Пусть плоская фигура, вращаясь, образует тело вращения (рис. 14, б). Его объём равен
а б Рис. 14. Вращение отрезка кривой и плоской фигуры вокруг оси
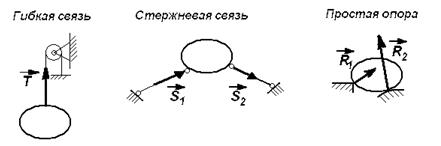
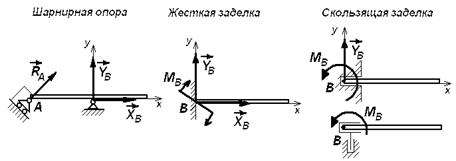
2.2.11. Основные типы связей и их реакции При решении задач на равновесие действие связей описывают путем ввода в задачу сил реакций связей и прикладывая их к выбранному объекту исследования. После этого сами связи далее игнорируются (принцип освобождаемости от связей) и объект считается условно свободным. А) Связи в плоских задачах статики (рис.15). Реакция гибкой связи направлена вдоль нити (каната, троса и т.п.) от объекта исследования. Реакция невесомого стержня направлена вдоль прямой линии, соединяющей концы стержня. Стержень оканчивается шарнирами. Силы прикладываются к стержню только в его концах. Стержень или сжат, или растянут.
Рис. 15. Реакции связей в плоских задачах статики
Реакция простой физически гладкой опоры направлена от опоры к объекту исследования вдоль нормали к их соприкасающимся поверхностям. Одна из этих поверхностей может быть геометрически не гладкой, если производные функций, задающих поверхность, имеют разрыв. Реакция подвижной шарнирной опоры направлена перпендикулярно опорной поверхности. Эта опора выражает запрет на смещение конца А в направлении перпендикуляра к опорной поверхности и одновременно - разрешение на смещение конца А вдоль опорной поверхности и на поворот вокруг конца А. Неподвижная шарнирная опора запрещает смещение точки Жесткая заделка означает соединение балки со стеной, при котором все три степени свободы балки как плоской фигуры закрепощены. Действие заделки на балку характеризуется моментом заделки и составляющими силами. Скользящая заделка оставляет закрепощённой «вращательную» степень свободы балки и одну или две поступательные; соответственно действие заделки на балку описывается моментом заделки и силой, перпендикулярной разрешенному направлению скольжения, или только моментом. Б) В пространственных задачах встречаются: цилиндрический шарнир, реакция которого описывается составляющими силами, перпендикулярными оси шарнира; сферический шарнир, реакция которого описывается тремя составляющими силами; заделка, реакция которой описывается в общем случае тремя составляющими силами и тремя составляющими момента заделки. 2.2.12. Статически определимые конструкции Когда исследуют равновесие системы твердых тел, соединенных между собой тем или иным способом, то её называют конструкцией. Если неизвестные величины в задаче статики могут быть найдены из системы уравнений равновесия всей конструкции или ее частей, то конструкция называется статически определимой. Если число неизвестных больше числа уравнений статики, то конструкция будет статически неопределимой. В задачах статики часто встречаются стержневые конструкции: фермы, рамы и проч. Стержнем называют цилиндрическое тело, поперечный размер которого мал по сравнению с размером в направлении образующей. Стержни могут «работать» не только на сжатие-растяжение, но и на изгиб и кручение; их в строительной механике называют также балками и брусьями. Рассмотрим плоскую конструкцию из трех стержней (балок) 1, 2 и 3, изображенную на рис. 16, а. На каждый отдельно взятый в качестве твердого тела стержень действует плоская произвольная система сил (см. п. 2.2.4), и для трех стержней можно составить неопределимости данной конструкции. Найдем число степеней её свободы по формуле п. В.10. Система трех свободных балок как плоских фигур имеет
Уравнения, описывающие шарнирные соединения балок друг с другом:
Всего 10 уравнений связей; число степеней свободы
Число степеней свободы статически определимой стержневой конструкции, изображенной на рис. 16. в, равно нулю. Расчет статически неопределимой упругой стержневой конструкции выполняют методами сопротивления материалов. Допустив, что конструкция способна деформироваться, к уравнениям равновесия самой конструкции или ее частей как твердых тел добавляют уравнения, выражающие условия совместности деформаций ее частей. Систему уравнений равновесия замыкают уравнения, описывающие связь между деформациями и силами - закон упругости (закон Гука).
а б в Рис. 16. Составные стержневые конструкции
|
||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 1077; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.014 с.) |

 , а эта подвижная ось вращается вокруг неподвижной оси с угловой скоростью
, а эта подвижная ось вращается вокруг неподвижной оси с угловой скоростью  так, что оси пересекаются. Тогда абсолютная угловая скорость тела определяется формулой
так, что оси пересекаются. Тогда абсолютная угловая скорость тела определяется формулой

 меняет величину и направление. Прямая, вдоль которой в данный момент времени направлен этот вектор, называется мгновенной осью вращения тела.
меняет величину и направление. Прямая, вдоль которой в данный момент времени направлен этот вектор, называется мгновенной осью вращения тела. . Моделью сферического движения может служить движение сферической фигуры по сфере. Сферическое движение
. Моделью сферического движения может служить движение сферической фигуры по сфере. Сферическое движение , угол прецессии
, угол прецессии  и угол нутации
и угол нутации  . Термин «прецессия» (предшествование) происходит из астрономии: благодаря прецессии земной оси имеет место ежегодное предварение равноденствий примерно на
. Термин «прецессия» (предшествование) происходит из астрономии: благодаря прецессии земной оси имеет место ежегодное предварение равноденствий примерно на  секунд. Период этой прецессии 26 тысяч лет. Термин «нутация» происходит от латинского глагола «качаться», «дрожать». Нутация тела совершается вокруг линии узлов
секунд. Период этой прецессии 26 тысяч лет. Термин «нутация» происходит от латинского глагола «качаться», «дрожать». Нутация тела совершается вокруг линии узлов  .
. (греч. «ню») линии узлов задается выражением
(греч. «ню») линии узлов задается выражением  , где
, где  - орт неподвижной оси
- орт неподвижной оси  ,
,  - орт подвижной оси
- орт подвижной оси  (оси собственного вращения), связанной с телом.
(оси собственного вращения), связанной с телом.
 - мгновенная ось вращения. Мгновенные скорости ее точек равны нулю. Движение плоской фигуры (см. п. 1.4.1) можно рассматривать как предельный случай движения сферической фигуры по сфере, радиус которой бесконечно велик. Скорость точки тела при сферическом движении определяется по формуле
- мгновенная ось вращения. Мгновенные скорости ее точек равны нулю. Движение плоской фигуры (см. п. 1.4.1) можно рассматривать как предельный случай движения сферической фигуры по сфере, радиус которой бесконечно велик. Скорость точки тела при сферическом движении определяется по формуле ,
, - радиус-вектор точки, проведенный из неподвижного полюса. Скорость направлена по касательной к окружности, центром которой является основание перпендикуляра, опущенного из точки на мгновенную ось.
- радиус-вектор точки, проведенный из неподвижного полюса. Скорость направлена по касательной к окружности, центром которой является основание перпендикуляра, опущенного из точки на мгновенную ось. .
. направлено на мгновенную ось.
направлено на мгновенную ось. движущуюся поступательно. Движение тела рассматривают как сложное его движение, состоящее из поступательного движения вместе с полюсом С и сферического движения вокруг полюса относительно системы отсчета
движущуюся поступательно. Движение тела рассматривают как сложное его движение, состоящее из поступательного движения вместе с полюсом С и сферического движения вокруг полюса относительно системы отсчета  . Обобщенные координаты тела – три координаты полюса С и три угла Эйлера. Скорость и ускорение точки тела определяются по формулам, которые выглядят так же, как формулы для скорости и ускорения точки плоской фигуры (см. п. 1.4.4):
. Обобщенные координаты тела – три координаты полюса С и три угла Эйлера. Скорость и ускорение точки тела определяются по формулам, которые выглядят так же, как формулы для скорости и ускорения точки плоской фигуры (см. п. 1.4.4): ;
; .
. .
. .
. – сила, действующая на точку со стороны какого-то корпускулярного тела или силового поля (fors (лат.) – неодолимая сила, случай; fortis – сильный).
– сила, действующая на точку со стороны какого-то корпускулярного тела или силового поля (fors (лат.) – неодолимая сила, случай; fortis – сильный).
 причем эти силы имеют общую линию действия, проходящую через точки 1 и 2.
причем эти силы имеют общую линию действия, проходящую через точки 1 и 2. ; индекс «Е» от слова exterior (лат.) - внешний) – это силы, действующие на систему со стороны тех механических объектов, которые не входят в состав этой системы.
; индекс «Е» от слова exterior (лат.) - внешний) – это силы, действующие на систему со стороны тех механических объектов, которые не входят в состав этой системы. ; interior - внутренний) – это силы взаимодействия между фрагментами данной механической системы.
; interior - внутренний) – это силы взаимодействия между фрагментами данной механической системы.
 - радиус-вектор, проведенный из полюса О в точку
- радиус-вектор, проведенный из полюса О в точку , содержащей полюс и линию действия силы
, содержащей полюс и линию действия силы 
 вектора силы
вектора силы 
 количества движения точки относительно полюса («кинетический момент»):
количества движения точки относительно полюса («кинетический момент»): .
. - декартовы проекции вектора
- декартовы проекции вектора  ,
,  ,
,  - проекции радиус-вектора (то есть координаты точки приложения силы). Тогда момент вектора относительно начала координат может быть найден по правилу символического определителя:
- проекции радиус-вектора (то есть координаты точки приложения силы). Тогда момент вектора относительно начала координат может быть найден по правилу символического определителя:


 вектора
вектора  вектора
вектора  относительно полюса
относительно полюса  ;
; относительно оси
относительно оси 
 совпадает с направлением оси
совпадает с направлением оси  (i = 1,2,…, n), приложенных к точкам механической системы, называют системой сил.
(i = 1,2,…, n), приложенных к точкам механической системы, называют системой сил.
 .
. .
. точек:
точек:




 ):
): 
 ,
, равен
равен
 точки приложения силы - скалярное произведение векторов
точки приложения силы - скалярное произведение векторов  ,
, - угол между векторами
- угол между векторами  на траектории в положение
на траектории в положение  есть криволинейный интеграл второго рода:
есть криволинейный интеграл второго рода:

 , то мощность равна
, то мощность равна  Мощность силы как и работа силы, является скалярной величиной. Она может быть положительна, отрицательна или равна нулю.
Мощность силы как и работа силы, является скалярной величиной. Она может быть положительна, отрицательна или равна нулю. .
. – ой точки твердого тела равна сумме скорости полюса
– ой точки твердого тела равна сумме скорости полюса  и скорости вращения этой точки вокруг полюса (п. 1.5.5):
и скорости вращения этой точки вокруг полюса (п. 1.5.5): ,
, - радиус-вектор точки относительно полюса
- радиус-вектор точки относительно полюса 
 , получим выражение суммарной элементарной работы сил:
, получим выражение суммарной элементарной работы сил:

 - ой точки
- ой точки , проходящей через полюс
, проходящей через полюс  , тогда мощность сил
, тогда мощность сил 
 .
. , так и внутренних
, так и внутренних  сил.
сил. полюса – центра масс и угловую скорость
полюса – центра масс и угловую скорость  тела (см. п. 3.2). Теоремы об изменении количества движения и об изменении кинетического момента дают возможность составить дифференциальные уравнения относительно проекций этих скоростей – дифференциальные уравнения движения тела. Количество этих уравнений равно числу степеней свободы тела. Главный вектор и главный момент системы внешних сил вполне определяют силовое влияние на тело со стороны окружающей среды. Поэтому системы сил, приложенные к твердому телу, считаются взаимно эквивалентными, если они имеют одинаковые главные векторы и главные моменты.
тела (см. п. 3.2). Теоремы об изменении количества движения и об изменении кинетического момента дают возможность составить дифференциальные уравнения относительно проекций этих скоростей – дифференциальные уравнения движения тела. Количество этих уравнений равно числу степеней свободы тела. Главный вектор и главный момент системы внешних сил вполне определяют силовое влияние на тело со стороны окружающей среды. Поэтому системы сил, приложенные к твердому телу, считаются взаимно эквивалентными, если они имеют одинаковые главные векторы и главные моменты.
 ;
;  ;
;  ;
; ;
;  ;
;  .
. и т.д.
и т.д. ;
;  , называемый моментом пары. Пусть
, называемый моментом пары. Пусть  ; тогда величина момента пары равна
; тогда величина момента пары равна  . Здесь
. Здесь 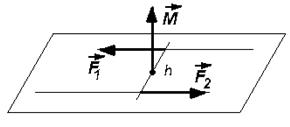
 . В этом смысле система сил считается приведенной к полюсу
. В этом смысле система сил считается приведенной к полюсу  ,
, - главный вектор, приложенный в полюсе
- главный вектор, приложенный в полюсе  главного момента на направление главного вектора. Величины
главного момента на направление главного вектора. Величины  фрагментов тела и координаты
фрагментов тела и координаты  центров тяжести этих фрагментов, то координаты общего центра тяжести
центров тяжести этих фрагментов, то координаты общего центра тяжести  ,
,  ,
,  ,
, - общий вес тела. Радиус-вектор центра масс определяется формулой
- общий вес тела. Радиус-вектор центра масс определяется формулой  . Множители
. Множители  называют нормированными весовыми коэффициентами, т.к. их сумма равна 1.
называют нормированными весовыми коэффициентами, т.к. их сумма равна 1. , равна
, равна  .
.
 .
. фрагментов (или их площади, или длины). Если фрагмент представляет собой пустоту (раковину в теле), то его объём берется со знаком «-».
фрагментов (или их площади, или длины). Если фрагмент представляет собой пустоту (раковину в теле), то его объём берется со знаком «-». .
. , вращаясь вокруг оси Оz,
, вращаясь вокруг оси Оz, ,
, - абсцисса центра
- абсцисса центра  , где
, где  - абсцисса центра тяжестифигуры,
- абсцисса центра тяжестифигуры,  – ее площадь.
– ее площадь.
 в плоскости
в плоскости  и разрешает поворот вокруг точки
и разрешает поворот вокруг точки  и
и  .
. уравнений равновесия. В этих уравнениях будут фигурировать 10 неизвестных реакций: реакции опор
уравнений равновесия. В этих уравнениях будут фигурировать 10 неизвестных реакций: реакции опор  и
и  , а также проекции действующих в шарнирах сил давления балок друг на друга:
, а также проекции действующих в шарнирах сил давления балок друг на друга:  и
и  (рис. 16,б). Количество неизвестных превышает число уравнений статики на 1, и это число «1» можно рассматривать как меру статической
(рис. 16,б). Количество неизвестных превышает число уравнений статики на 1, и это число «1» можно рассматривать как меру статической степеней свободы. Уравнения связей, выражающие условия заделки:
степеней свободы. Уравнения связей, выражающие условия заделки: ;
;  .
. ;
;  .
. .
.



