
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опорный конспект лекций. Ч. 1Стр 1 из 4Следующая ⇒
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Опорный конспект лекций. Ч. 1 Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Санкт-Петербург
УДК 531.1:531.2(075.8) ББК 2221я73 У76
Рецензент: профессор кафедры машиноведения Санкт-Петербургского государственного университета технологии и дизайна А. В. Марковец
Усов, А. Г. У76 Теоретическая механика. Опорный конспект лекций: учебное пособие для студентов СПГУТД всех спе- циальностей. Ч. 1 / Усов А. Г. – СПб.: ФГБОУВПО «СПГУТД», 2011. – 52 с. ISBN 978-5-7937-0661-2
Конспект содержит определения терминов, формулировки основных положений курса теоретической механики, а также разъяснения тех вопросов программы, изучение которых студентам предлагается выполнить самостоятельно. Конспект предназначен для студентов, обучающихся в СПГУТД по различным специальностям.
УДК 531.1:531.2(075.8) ББК 2221я73
Содержание Введение …………………………………………………………...... 5 Основные объекты, изучаемые в курсе теоретической механики (5). Материальная точка, механическая система, твердое тело (5). Механическое движение (5). Свойства пространства и времени (5). Система отсчета (6). Обобщенные координаты (7). Число степеней свободы (7). Связи (7). Что означает задать движение механической системы (7). Сила (10). Положение и состояние механической системы (10). Три раздела теоретической механики (11). Раздел 1. Кинематика …………………………………………… 11 1.1. Кинематика точки ………………………………………….. 11 Способы задания движения точки (11). Кинематические параметры точки, траектория (11). Вектор перемещения (11). Скорость точки (12). Ускорение точки (13). Путь (13). Траектория, скорость и ускорение точки при картезианском задании движения (13-14). Естественный способ задания движения (14). Скорость точки при естественном задании ее движения (14). Ускорение точки при естественном задании движения (14). Кривизна и радиус кривизны траектории (15). Естественный трехгранник (17). Равнопеременное движение точки (17). 1.2. Простейшие движения твердого тела ……………………… 19 Классификация движений твердого тела (18). Поступательное движение тела(18). Вращательное движение тела ( описание движения) (18). Угловая скорость вращающегося тела (18). Угловое ускорение (19). Равнопеременное вращение (19). Траектория точки вращающегося тела (19). Скорость и ускорение точки вращающегося тела (20). Передаточная формула для зубчатой передачи. Редукторы. Формула Виллиса (20-22).
1.3. Сложное движение точки........................................................... 22 Описание сложного движения; относительная, переносная и абсолютная скорость (22). Теоремы сложения (22-23). 1.4. Плоское движение твердого тела …………………………… 23 Описание плоского движения (23). Скорость точки плоской фигуры (23). Ускорение точки плоской фигуры (24). Мгновенный центр скоростей (25). 1.5. Сложение вращений твердого тела ………………………. 25 Сложение вращений вокруг пересекающихся осей (25).Сложение вращений вокруг параллельных осей (26).Сферическое движение тела (26). Скорость и ускорение точки тела при сферическом движении (27). Движение свободного тела (28). Раздел 2. Введение в динамику. Статика твердого тела ……… 28 2.1. Введение в динамику ……………………………………… 28 Аксиомы классической механики (29). Классификация сил (30). Момент вектора относительно полюса (30). Момент вектора относительно оси (32). Главный вектор и главный момент системы сил (33). Меры механического движения (33). Меры действия сил (34). Мощность и элементарная работа сил, действующих на твердое тело (35). Теоремы динамики механической системы в дифференциальной форме (37). 2.2. Статика твердого тела ………………………………………. 37 Эквивалентные системы сил (37). Векторные уравнения равновесия твердого тела (37). Классификация систем сил (38). Уравнения равновесия в проекциях (38). Пара сил (39). Равнодействующая (39). Приведение системы сил к полюсу (40). Инварианты статики (40). Центр тяжести (40).Координаты центра тяжести однородного тела (41). Теоремы Гюльдена (42). Основные типы связей и их реакции (42). Статически определимые конструкции (44). Силы сопротивления движению тела по опоре (46). Трение скольжения (47). Сопротивление качению колеса(49). Трение гибкой нити о шероховатый цилиндр (49). Заключение....................................................................................... 50 Список литературы ……………………………………………… 50 Gaudeamus........................................................................................... 51
ВВЕДЕНИЕ В.1. Основные объекты, изучаемые в курсе теоретической механики: материальная точка, твердое тело, механическая система с конечным числом степеней свободы. Движение этих объектов описывается обыкновенными дифференциальными уравнениями (в отличие от дифференциальных уравнений с частными производными, описывающих движение сплошной среды). В.2. Материальная точка - физическое тело, размерами которого можно пренебречь по сравнению с расстояниями, на которые оно перемещается. Бесструктурный объект нулевой размерности, обладающий единственным существенным качеством – массой. В.3.Механическая система - множество материальных точек, движения которых взаимосвязаны. В.4. Твердое тело - механическая система, расстояние между любыми двумя точками которой остается неизменным. Совокупность изменений расстояний между точками тела представляет собой деформациютела. В.5. Механическое движение - упорядоченное изменение взаимного расположения механических объектов. Изучение порядка изменения основывается на идее времени. Изучение порядка расположения - на идее пространства. ♦ Обсуждение смысла понятий «пространство» и «время» продолжается в позитивных науках и в философии с античных времен по настоящее время. Философский словарь 1983 г. акцентирует свойство времени выражать «последовательность смены состояний материальных систем и процессов». Переведенная с немецкого языка энциклопедия, изданная Шуваловым в 1781 г., обращает внимание читателя на случайную ткань времени: «Порядок случайных вещей, одна за другою последующих». КИНЕМАТИКА КИНЕМАТИКА ТОЧКИ 1.1. 1.Способы задания движения точки: векторный, координатный и естественный. 1.1.2. Кинематические параметры точки - это величины, определяющие а) положение (перемещение) точки, б) скорость, в) ускорение точки. Аналогичные кинематические параметры вращающегося твердого тела - это угол его поворота, угловая скорость, угловое ускорение тела. 1.1.3. Траектория точки - геометрическое место положений точки в пространстве, или годограф («рисунок пути») радиус-вектора точки. 1.1.4. Векторперемещения точки Пусть движение точки происходит в интервале времени Вектор перемещения точки за время
Рис. 2. Участок траектории точки
Скорость точки Вектор средней скорости на участке Вектор мгновенной скорости в момент времени
Здесь предыдущая точка Вектор средней скорости
Величина скорости (модуль вектора
Ускорение точки Рассмотрим три последовательных положения точки на траектории, соответствующие моментам времени
Вектор среднего ускорения лежит в плоскости треугольника 1.1.7. Путь точки на заданном промежутке времени
1.1.8. Исследовать траекторию точки при координатном способе задания ее движения бывает удобно, если исключить время как параметр из уравнений движения и составить таким способом уравнения траектории в виде зависимостей между координатами точки. 1.1.9. Скорость точки при задании ее движения в декартовой системе координат Проекции скорости на оси координат:
Составляющие скорости по осям координат:
Вектор скорости: Величина (модуль вектора) скорости:
Сложное движение точки 1.3.1.Описание сложного движения точки Пусть имеются две разные системы отсчета, относительно которых исследуется движение некоторой точки М, причем одна из этих систем отсчета считается неподвижной, или абсолютной, а другая является подвижной (в качестве абсолютной обычно выступает инерциальная система отсчета). Движение точки М относительно неподвижной системы отсчета называется абсолютным движением этой точки, а движение относительно подвижной системы отсчета - относительным. Сложным движением точки М называется такое абсолютное ее движение, которое можно представить как композицию (результат «сложения») относительного и переносного её движений. При этом переносным называется движение точки М вместе с подвижной системой отсчета относительно неподвижной. 1.3.2.Относительная, переносная и абсолютная скорости точки Относительная (relatif (фр.))скорость точки Переносная (emporter) скорость бы точка при «замороженном» относительном движении; иначе говоря, это скорость того пункта подвижной системы отсчета, в котором находится точка в расчетный момент времени.
Абсолютная (absolu) скорость 1.3.3. Теорема о сложении скоростей при сложном движении точки
1.3.4. Теорема Кориолиса о сложении ускорений
где
Введение в динамику 2.1.1.Аксиомы классической механики А) Первый закон Ньютона (принцип инерции). Б) Второй закон Ньютона в общем виде формулируется по отношению к материальной точке переменной массы
Основное уравнение динамики материальной точки постоянной массы:
Второй закон Ньютона, как и другие уравнения динамики, формулируется («по умолчанию») относительно инерциальной системы отсчета (существование таких систем отсчета постулируется первым законом Ньютона). В качестве инерциальной системы берут обычно систему отсчета, связанную с Землей («геоцентрическая» система отсчета). С большей точностью второй закон Ньютона выполняется по отношению к системе отсчета, связанной с плоскостью эклиптики («гелиоцентрическая»), и еще точнее - относительно системы отсчета, связанной с «удаленными звездами». В) Дополнение ко второму закону Ньютона (принцип независимости действия сил). Следствие: запись основного уравнения динамики точки в виде
Г) Третий закон Ньютона (принцип соответствия действия и противодействия): силы взаимодействия между материальными точками 1 и 2 связаны уравнением Простейшими следствиями законов Ньютона являются теоремы динамики. Они выражают связь между мерами механического движения и соответствующими им мерами действия сил. Теоремы динамики являются формами законов сохранения (импульса, момента импульса и энергии). Законы сохранения в свою очередь отражают симметрию пространства и времени классической механики: однородность пространства, изотропность пространства, однородность времени. 2.1.2.Классификация сил, действующих на точки механической системы А) Задаваемые («активные») силы и реакции связей. Задаваемые – силы, действующие на точки исследуемой механической системы со стороны тех тел или силовых полей, которые непосредственно не ограничивают подвижность системы. Активная сила задается или непосредственно некой инструкцией, или указанием на какой-то физический закон (являющийся следствием не законов Ньютона, а иной физической теории). Реакции связей - это силы, характеризующие действие связей на исследуемый объект. В задачах механики реакции связей обычно являются неизвестными величинами. Б) Внешние и внутренние силы
Внешние силы ( Внутренние силы ( Помимо вышеупомянутых двух основных способов классификации, в частных ситуациях применяют и иные. Так, например, силы, действующие на сплошное (континуальное) тело, подразделяются на объёмные и поверхностные, сосредоточенные силы и распределенные нагрузки. 2.1.3. Момент вектора относительно полюса (механический момент) Момент вектора
Здесь приложения вектора Латинское слово «момент» означает некое действующее начало, существенное качество какого-то явления. Момент силы характеризует вращательный эффект действия силы. Вектор момента силы направлен перпендикулярно плоскости Величина момента силы равна произведению величины силы на плечо:
Плечо
Рис. 9. Момент вектора
Аналогично определяется момент вектора
Пусть
2.1.4. Момент вектора
Графо-аналитический расчет момента вектора 1) строим плоскость
Рис. 10. К расчету момента вектора
2) строим проекцию 3) находим плечо 4) Моменту вектора
Знак момента определяется по правилу правого винта (часовой стрелки): если направление вектора Момент вектора относительно оси равен нулю, если вектор и ось компланарны (линия действия вектора параллельна оси или пересекает её). 2.1.5.Главный вектор и главный момент системы сил Множество сил Главный вектор системы сил: Главный момент системы сил относительно данного полюса
Главный вектор и главный момент системы внутренних сил равны нулю (следствие третьего закона Ньютона). 2.1.6. Меры механического движения А) Количество движения материальной точки Мера механического движения механической системы равна сумме мер движения фрагментов системы. Количество движения механической системы, состоящей из
Количество движения механической системы можно найти как произведение общей массы системы на скорость центра масс (см. Ч. 2). Б) Кинетический момент материальной точки относительно неподвижного полюса О (момент количества ее движения относительно полюса):
Кинетический момент механической системы относительно полюса О
В) Кинетическая энергия материальной точки
Кинетическая энергия механической системы
2.1.7. Меры действия сил А) Импульс силы Элементарный импульс силы (импульс действия силы за бесконечно малое время Суммарный элементарный импульс множества сил, приложенных к точкам механической системы:
где Импульс силы
Б) Момент силы относительно полюса или оси (см. п. 2.1.4) В) Работа и мощность силы Элементарная работа силы
где Работа на «конечном» перемещении точки из положения
Мгновенная мощность силы Если элементарная работа является полным дифференциалом работы как функции 2.1.8. Мощность и элементарная работа сил, действующих на твердое тело Суммарная мощность всех сил, действующих на тело, есть величина
Скорость
где Суммарная мощность сил будет равна
Определив вектор бесконечно малого поворота тела как
Рис. 11. Полюс
Поскольку главный вектор и главный момент внутренних сил равны нулю, то эти силы не совершают работы при движении твердого тела. Работа складывается из работы главного вектора внешних сил при поступательном движении тела (вместе с полюсом При вращательном движении тела вокруг неподвижной оси 2.1.9.Теоремы динамики механической системы в дифференциальной форме можно записать как суждения о скоростях изменения мер движения:
Подчеркнем, что изменение кинетической энергии определяется мощностью как внешних Статика твердого тела 2.2.1. Эквивалентные друг другу системы сил Количество движения и кинетический момент твердого тела выражаются через скорость Пусть система сил состоит из одной силы. Перенеся силу вдоль линии ее действия, получим новую систему из одной силы, эквивалентную исходной системе. Поэтому сила, приложенная к твердому телу, является скользящим вектором. 2.2.2. Векторные уравнения равновесия твердого тела Если твердое тело покоится в течение некоторого промежутка времени, то меры механического движения его сохраняют в этом промежутке постоянные значения, равные нулю. Тогда из теорем динамики получаем необходимые условия равновесия твердого тела, накладываемые на приложенные к нему силы (уравнения равновесия системы сил):
Внутренние силы на состояние твердого тела как единого объекта не влияют, поэтому индекс «Е» (Exterior) в записях уравнений равновесия по умолчанию опускают. 2.2.3. Классификация систем сил, действующих на твердое тело, по взаимному расположению линий их действия: А) пространственные и плоские системы сил, Б) сходящиеся системы сил (линии действия всех сил пересекаются в одной точке); системы параллельных сил (линии действия всех сил параллельны друг другу); произвольные системы сил. Например: «пространственная система параллельных сил». 2.2.4. У равнения равновесия твердого тела (уравнения равновесия системы сил) в проекциях на оси декартовой системы координат Уравнения равновесия произвольной пространственной системы сил
Возможна краткая форма записи: Уравнения равновесия произвольной плоской системы сил
В уравнении моментов для плоской системы сил индекс «z» по умолчанию опускают. Знаки моментов определяют по правилу часовой стрелки: если сила «стремится» повернуть плоскую фигуру вокруг данного полюса против часовой стрелки, то момент считают положительным, иначе – отрицательным. Если полюс лежит на линии действия силы, то момент равен нулю. Можно составить уравнения равновесия плоской системы сил иначе: - два уравнения моментов относительно разных полюсов и одно уравнение проекций сил на ось, не перпендикулярную прямой, содержащей полюсы; - три уравнения моментов относительно трех разных полюсов, не лежащих на одной прямой. 2.2.5. Пара сил – система двух сил, равных по величине, направленных в противоположные стороны и имеющих не совпадающие линии действия. Главный вектор такой системы двух сил равен нулю, а главный момент относительно любого полюса есть один и тот же вектор Действие на твердое тело пары сил характеризуется действием на него силового момента со стрелками или круговой стрелкой.
Рис. 12. Пара сил
2.2.6. Равнодействующая системы сил - это одна сила, эквивалентная данной системе сил. Если главный момент системы относительно полюса 2.2.7. Приведение системы сил к полюсу. Инварианты статики твердого тела Систему сил, приложенных к твердому телу, можно интерпретировать как совокупность приложенной в полюсе
где При перемене полюса приведения сохраняет значение проекция Систему сил можно привести в общем случае к динаме; в частных случаях - к равнодействующей или к паре. Динама – это совокупность главного вектора и главного момента, в случае, когда они направлены вдоль одной прямой. Эта прямая называется осью динамы или центральной винтовой осью. В случае равновесия системы сил главный вектор и главный момент относительно любого полюса равны нулю. 2.2.8. Центр тяжести тела - такая точка заданы веса
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 489; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.142.115 (0.173 с.) |
 , и пусть моменту времени
, и пусть моменту времени  соответствует положение
соответствует положение  точки (рис. 2), а моменту
точки (рис. 2), а моменту  - положение
- положение  .
. -вектор
-вектор  , имеющий начало в точке
, имеющий начало в точке  . При векторном задании движения точки вектор перемещения есть «прирост» радиус-вектора точки за время
. При векторном задании движения точки вектор перемещения есть «прирост» радиус-вектора точки за время  :
:

 :
: 

 определена как производная от радиус-вектора слева. Когда последующая точка стягивается к предыдущей точке, то имеем производную справа. Вследствие удара по материальной точке производные от радиус-вектора в момент
определена как производная от радиус-вектора слева. Когда последующая точка стягивается к предыдущей точке, то имеем производную справа. Вследствие удара по материальной точке производные от радиус-вектора в момент  справа и слева могут не совпасть.
справа и слева могут не совпасть. на участке
на участке  на участке
на участке  направлен вдоль секущей
направлен вдоль секущей  ):
): .
. ,
,  ,
,  (рис. 2). Определим среднее ускорение на участке
(рис. 2). Определим среднее ускорение на участке  :
: .
. и лежит в соприкасающейся плоскости. Соприкасающуюся к траектории в точке
и лежит в соприкасающейся плоскости. Соприкасающуюся к траектории в точке  при условии
при условии  , т.е. при
, т.е. при 
 равен длине пройденной ею дуги траектории
равен длине пройденной ею дуги траектории .
.



 - это её скорость относительно подвижной системы отсчета (рассчитанная при «замороженном» переносном движении).
- это её скорость относительно подвижной системы отсчета (рассчитанная при «замороженном» переносном движении). – скорость, которой обладала
– скорость, которой обладала – скорость точки относительно неподвижной системы отсчета.
– скорость точки относительно неподвижной системы отсчета.

 - ускорение Кориолиса,
- ускорение Кориолиса,  - вектор угловой скорости подвижной системы отсчета. Если этот вектор коллинеарен вектору относительной скорости или равен нулю (при поступательном движении подвижной системы отсчета), то кориолисово ускорение отсутствует.
- вектор угловой скорости подвижной системы отсчета. Если этот вектор коллинеарен вектору относительной скорости или равен нулю (при поступательном движении подвижной системы отсчета), то кориолисово ускорение отсутствует. .
. .
. – сила, действующая на точку со стороны какого-то корпускулярного тела или силового поля (fors (лат.) – неодолимая сила, случай; fortis – сильный).
– сила, действующая на точку со стороны какого-то корпускулярного тела или силового поля (fors (лат.) – неодолимая сила, случай; fortis – сильный).
 причем эти силы имеют общую линию действия, проходящую через точки 1 и 2.
причем эти силы имеют общую линию действия, проходящую через точки 1 и 2. ; индекс «Е» от слова exterior (лат.) - внешний) – это силы, действующие на систему со стороны тех механических объектов, которые не входят в состав этой системы.
; индекс «Е» от слова exterior (лат.) - внешний) – это силы, действующие на систему со стороны тех механических объектов, которые не входят в состав этой системы. ; interior - внутренний) – это силы взаимодействия между фрагментами данной механической системы.
; interior - внутренний) – это силы взаимодействия между фрагментами данной механической системы. определяется выражением
определяется выражением
 - радиус-вектор, проведенный из полюса О в точку
- радиус-вектор, проведенный из полюса О в точку , содержащей полюс и линию действия силы
, содержащей полюс и линию действия силы 
 вектора силы
вектора силы 
 количества движения точки относительно полюса («кинетический момент»):
количества движения точки относительно полюса («кинетический момент»): .
. - декартовы проекции вектора
- декартовы проекции вектора  ,
,  ,
,  - проекции радиус-вектора (то есть координаты точки приложения силы). Тогда момент вектора относительно начала координат может быть найден по правилу символического определителя:
- проекции радиус-вектора (то есть координаты точки приложения силы). Тогда момент вектора относительно начала координат может быть найден по правилу символического определителя:
 - это проекция момента относительно полюса
- это проекция момента относительно полюса 

 вектора
вектора  вектора
вектора  относительно полюса
относительно полюса  ;
; относительно оси
относительно оси 
 совпадает с направлением оси
совпадает с направлением оси  (i = 1,2,…, n), приложенных к точкам механической системы, называют системой сил.
(i = 1,2,…, n), приложенных к точкам механической системы, называют системой сил.
 .
. .
. точек:
точек:




 ):
): 
 ,
,
 точки приложения силы - скалярное произведение векторов
точки приложения силы - скалярное произведение векторов  ,
, - угол между векторами
- угол между векторами  есть криволинейный интеграл второго рода:
есть криволинейный интеграл второго рода:

 , то мощность равна
, то мощность равна  Мощность силы как и работа силы, является скалярной величиной. Она может быть положительна, отрицательна или равна нулю.
Мощность силы как и работа силы, является скалярной величиной. Она может быть положительна, отрицательна или равна нулю. .
. – ой точки твердого тела равна сумме скорости полюса
– ой точки твердого тела равна сумме скорости полюса  и скорости вращения этой точки вокруг полюса (п. 1.5.5):
и скорости вращения этой точки вокруг полюса (п. 1.5.5): ,
, - радиус-вектор точки относительно полюса
- радиус-вектор точки относительно полюса 
 , получим выражение суммарной элементарной работы сил:
, получим выражение суммарной элементарной работы сил:

 - ой точки
- ой точки , проходящей через полюс
, проходящей через полюс  , тогда мощность сил
, тогда мощность сил 
 .
. , так и внутренних
, так и внутренних  сил.
сил. полюса – центра масс и угловую скорость
полюса – центра масс и угловую скорость  тела (см. п. 3.2). Теоремы об изменении количества движения и об изменении кинетического момента дают возможность составить дифференциальные уравнения относительно проекций этих скоростей – дифференциальные уравнения движения тела. Количество этих уравнений равно числу степеней свободы тела. Главный вектор и главный момент системы внешних сил вполне определяют силовое влияние на тело со стороны окружающей среды. Поэтому системы сил, приложенные к твердому телу, считаются взаимно эквивалентными, если они имеют одинаковые главные векторы и главные моменты.
тела (см. п. 3.2). Теоремы об изменении количества движения и об изменении кинетического момента дают возможность составить дифференциальные уравнения относительно проекций этих скоростей – дифференциальные уравнения движения тела. Количество этих уравнений равно числу степеней свободы тела. Главный вектор и главный момент системы внешних сил вполне определяют силовое влияние на тело со стороны окружающей среды. Поэтому системы сил, приложенные к твердому телу, считаются взаимно эквивалентными, если они имеют одинаковые главные векторы и главные моменты.
 ;
;  ;
;  ;
; ;
;  ;
;  .
. и т.д.
и т.д. ;
;  , называемый моментом пары. Пусть
, называемый моментом пары. Пусть  ; тогда величина момента пары равна
; тогда величина момента пары равна  . Здесь
. Здесь 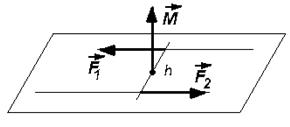
 . В этом смысле система сил считается приведенной к полюсу
. В этом смысле система сил считается приведенной к полюсу  ,
, - главный вектор, приложенный в полюсе
- главный вектор, приложенный в полюсе  главного момента на направление главного вектора. Величины
главного момента на направление главного вектора. Величины  фрагментов тела и координаты
фрагментов тела и координаты  центров тяжести этих фрагментов, то координаты общего центра тяжести
центров тяжести этих фрагментов, то координаты общего центра тяжести  ,
,  ,
,  ,
,


