Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет и Построение естественной механической характеристикиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
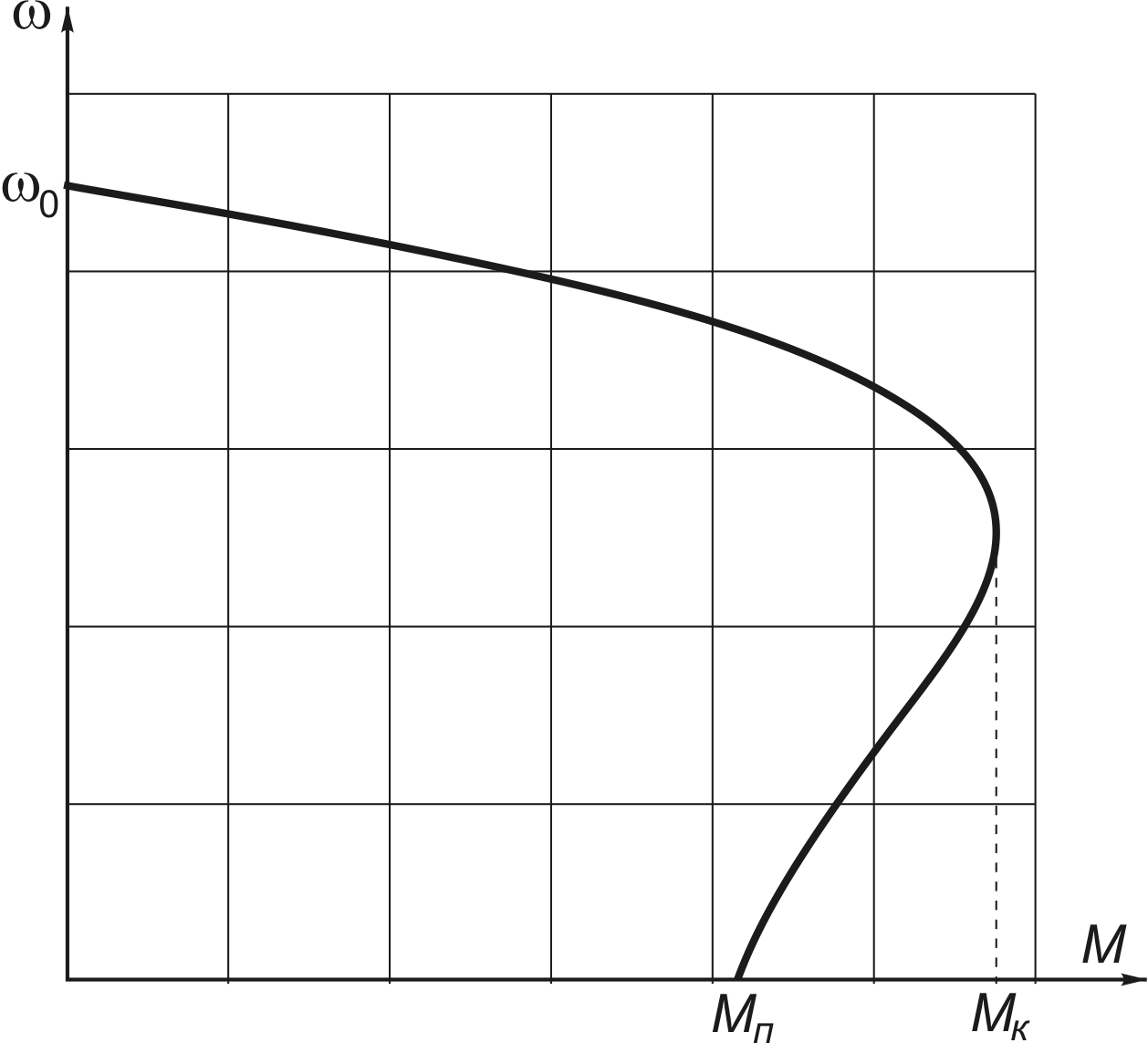
Естественной механической характеристикой называется зависимость Воспользуемся упрощенной формулой Клосса
где sK – критическое скольжение выбранного двигателя. Следует отметить, что характеристики, построенные по данной формуле имеют значительные погрешности в области s > sК. Угловую частоту вращения ротора рассчитываем по формуле
Задаваясь различными значениями скольжения s в диапазоне s = (0…1), определяем соответствующие значения момента и частоты вращения. Результаты расчетов заносим в таблицу 2.
Таблица 2 – Данные для построения естественной механической характеристики
По результатам расчетов построим естественную механическую характеристику (рис.4).
Рис.4 Примерный вид естественной механической характеристики АД
ВЫБОР СИСТЕМЫ УПРАВЛЕНИЯ В электроприводе для управления скоростью асинхронного двигателя с короткозамкнутым ротором используются преобразователи напряжения и частоты. Рассмотрим их разновидности, с целью выбора наилучшего варианта. При регулировании напряжения скольжение изменяется в широких пределах и потери, выделяющиеся в виде тепла в элементах роторной цепи, пропорциональны скольжению. Для изменения напряжения применяется тиристорный регулятор напряжения. Разомкнутая система «Тиристорный регулятор напряжения - Асинхронный двигатель» имеет небольшой диапазон регулирования (от 0,7∙wном до wном), замкнутая система может обеспечивать диапазон регулирования до 10:1. Переходной процесс при регулировании напряжения – очень тяжёлый в энергетическом отношении режим: потери энергии в десятки раз выше, чем за то же время в установившемся режиме. Электропривод с регулированием напряжением питания асинхронных двигателей применяется преимущественно тогда, когда момент сопротивления на валу зависит от частоты вращения по квадратичному закону (МС~ω2), а также когда при небольшом снижении частоты вращения достигается существенное снижение мощности, например для вентиляторов, воздуходувок, центробежных насосов. Поэтому управление скоростью асинхронного двигателя с помощью тиристорного регулятора напряжения неприемлем для грузоподъемных механизмов. В качестве статических преобразователей частоты наибольшее распространение получил двухзвенный преобразователь частоты со звеном постоянного тока, в котором происходит предварительное выпрямление тока с последующим инвертированием; выходная частота не связана с частотой сети и может изменяться от малых значений до нескольких тысяч герц; Эти устройства позволили экономично и точно управлять скоростью и моментом двигателя, избавиться от применения неэкономичных гидромуфт, а также сложных и дорогостоящих приводов постоянного тока. В частотно-регулируемом приводе применяются два вида управления – скалярное и векторное. При скалярном управлении одновременно изменяют частоту и амплитуду подводимого к двигателю напряжения. Для поддержания требуемых рабочих характеристик двигателя необходимо одновременно с изменением частоты изменять по определённому закону (алгоритму) и амплитуду напряжения. При этом частота является независимым воздействием, а соответствующую ей амплитуду определяют исходя из того, как при изменении частоты должны изменяться форма механической характеристики и максимальный момент привода. Векторное управление позволяет существенно увеличить диапазон и точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Векторное управление с датчиком обратной связи по скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов. Исходя из вышесказанного, выбираем для использования в разрабатываемом электроприводе преобразователь частоты с автономным инвертором напряжения.
Таблица 2 – Модели преобразователей частоты Mitsubishi Electric
Таблица 3 – Модели преобразователей частоты АВВ
Таблица 4 – Модели преобразователей частоты Schneider Electric
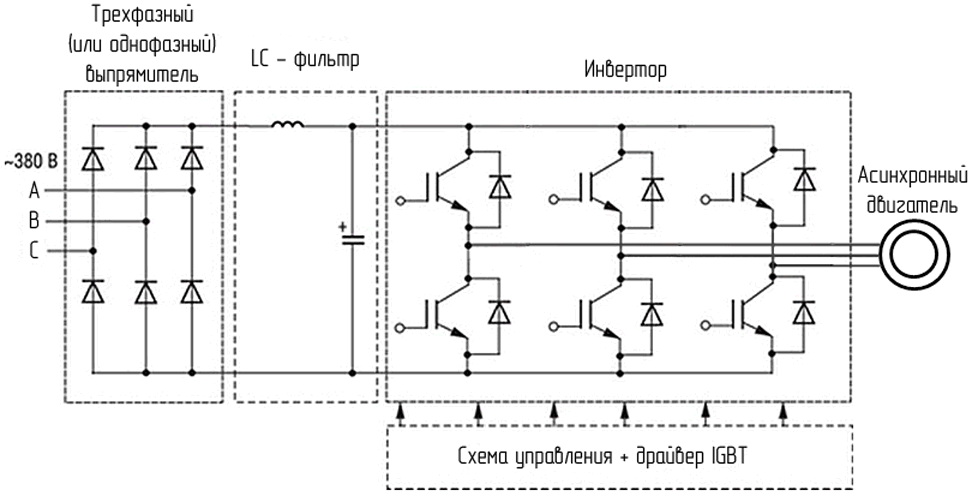
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей выполнена на транзисторах IGBT, работающих в режиме электронных ключей. Схема управления выполняется на цифровых микроконтроллерах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (защита, контроль, диагностика). Частотные инверторы Частотный регулятор имеет структуру с явно выраженным звеном постоянного тока (выпрямитель + фильтр), что показано на рис. 5. В преобразователях этого типа используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в трехфазном или однофазном выпрямителе, сглаживается LC-фильтром, а затем вновь преобразуется инвертором в переменное напряжение регулируемой частоты и амплитуды.
Рис. 5. Структурная схема преобразователя частоты со звеном постоянного тока
Преобразователи частоты на транзисторах IGBT по сравнению с тиристорными при одинаковой выходной мощности отличаются меньшими габаритами, сниженной массой и повышенной надежностью в силу модульного исполнения электронных ключей и лучшего отвода тепла с поверхности силового модуля. Они имеют более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность повреждений и отказа электропривода. Напряжение питающей сети с постоянной частотой и амплитудой (Uвх = const; fвх = const) поступает на трехфазный или однофазный выпрямитель. Выпрямитель и фильтр входят в состав блока постоянного тока, основное назначение которого – получить на выходе постоянное напряжение с малыми пульсациями, которое используется для питания преобразователя частоты. Инвертор преобразует постоянное напряжение в трехфазное напряжение с переменной частотой и изменяемой амплитудой. Схема управления формирует сигналы для коммутации обмоток электродвигателя в нужные моменты времени. Импульсы коммутации каждой обмотки в пределах периода модулируются по синусоидальному закону. Максимальную ширину импульсы имеют в середине полупериода. К началу и к концу полупериода ширина импульсов уменьшается. Таким образом, схема управления формирует широтно-импульсную модуляцию (ШИМ) напряжения, которое подается на обмотки электродвигателя. В некоторых случаях к выходам преобразователя частоты подключается фильтр, но в частотных инверторах на транзисторах IGBT необходимость в выходном фильтре практически отсутствует. Таким образом, на выходе инвертора формируется трехфазное напряжение переменной частоты и амплитуды (fвых = Var; Uвых = Var), которое и задает нужную частоту вращения и требуемый момент на валу двигателя.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-25; просмотров: 655; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.141 (0.009 с.) |

 , построенная при номинальных параметрах источника питания.
, построенная при номинальных параметрах источника питания. , (55)
, (55) . (55)
. (55)