Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кафедра «Электрическая техника»Содержание книги Поиск на нашем сайте Кафедра «Электрическая техника»
К.В. Хацевский
Элементы автоматических устройств
Методические указания к практическим работам
Омск 2015 ОГЛАВЛЕНИЕ
Введение.............................................................................................................. 4 1 Построение кинематической схемы механизма.............................................. 7 2 Расчет статических моментов и сил................................................................. 7 2.1 Статические моменты при движении с грузом............................................ 7 2.2 Статические моменты при движении без груза........................................... 8 3 Расчет приведенных статических моментов.................................................... 9 4 Предварительный выбор электродвигателя................................................. 10 5 Приведение моментов инерции..................................................................... 11 6 Расчет динамических моментов..................................................................... 12 7 Расчет тахограммы работы электродвигателя............................................. 13 8 Расчет нагрузочной диаграммы электродвигателя...................................... 15 9 Проверка электродвигателя по перегрузочной способности и условиям 10 Построение естественной механической характеристики.......................... 19 11 Выбор системы управления......................................................................... 20 12 Расчет и построение искусственных механических характеристик........... 24 13 Проектирование системы управления........................................................ 26 13.1 Обоснование принципа построения системы автоматического 13.2 Синтез системы автоматического управления......................................... 28 Список рекомендуемой литературы................................................................ 36 Приложение 1.................................................................................................... 37 Приложение 2.................................................................................................... 38
ВВЕДЕНИЕ
Преимуществом электрической энергии, перед другими видами энергии (тепловая, гидравлическая, пневматическая) является простата её переработки и распределения, лёгкость преобразования её в другие виды энергии, что обусловило широчайшее распространение электрического привода. Более 90% привода, применяемого промышленности является электрическим. Электропривод является неотъемлемой частью многих агрегатов и комплексов, используемых в различных отраслях народного хозяйства, науки и техники. Применение электрического привода имеет ряд особенностей: возможностью применения электродвигателей различных мощностей (от десятых долей ватта до десятков мегаватт) и различных скоростей движения; возможностью использования электродвигателей в самых разнообразных условиях; возможностью реализовать при помощи достаточно простых средств различные виды движения для приводимых механизмов; лёгкостью автоматизации механизмов на основе электропривода; простой интеграции электрического привода в системы автоматического управления; высоким КПД; надёжностью в эксплуатации; благоприятными условиями для обслуживающего персонала; отсутствием загрязнения окружающей среды. Эти факторы оцениваются как основные, позволившие утроить объем мирового производства за последние два десятилетия. Для управления координатами электропривода (скорость, ток и момент) применяются различные способы, такие как изменение частоты и амплитуды питающего напряжения; введение регулирующих сопротивлений в силовые цепи электродвигателей; изменение магнитного потока, создаваемого в магнитной цепи электродвигателей и т. п. Широкое использование регулируемых электроприводов привело к тому, что современный электропривод является не только энергосиловой основой, позволяющей обеспечить производственные механизмы необходимой механической энергией, но и средством управления технологическими процессами, так как задачи по реализации качества производственных процессов в настоящее время в большинстве случаев возлагаются на системы управления регулируемыми электроприводами в сочетании с системами технологической автоматики. В связи с возрастанием цен на энергоносители, в частности на электроэнергию, и ограниченными возможностями увеличения мощности энергогенерирующих установок особую актуальность приобретает проблема энергосбережения, в том числе проблема снижения электропотребления.
Общие положения Целью курсового проекта является расширение, углубление и закрепление знаний, полученных студентами на лекциях и лабораторных занятиях, а также приобретение навыков самостоятельной работы. Содержание проекта включает следующие основные этапы проектирования: построение нагрузочной диаграммы механизма; выбор двигателя, проверка выбранного двигателя, расчет его естественных и искусственных характеристик, расчет и построение графиков переходных процессов; составление описания работы электропривода. В учебном пособии даются практические рекомендации по выполнению задания на проектирование и формулируются требования к оформлению проекта. Это должно помочь студенту в его самостоятельной работе и позволит унифицировать требования к содержанию, объему и оформлению проекта. В таблице вариантов исходных данных (Приложение 1) для расчета приняты следующие обозначения: – грузоподъемность т 0, кг; – масса грузозахвата т 1, кг; – масса противовеса т2, кг; – скорость подъема/спуска груза V, м/с; – максимальное ускорение а, м/с2; – диаметр канатоведущего шкива (барабана) D, м; – передаточные числа ступеней редуктора i 1, i 2; – моменты инерции J 1 … J 5 =, кг×м2. Курсовой проект состоит из расчетно-пояснительной записки и графического материала. Пояснительная записка представляет собой сброшюрованную работу объемом 35-40 страниц текста на листах формата А4 (297×210 мм). Допускается оформление записки на компьютере. Пояснительная записка должна иметь титульный лист, форма которого дана в Приложении 2; заполненный бланк задания на курсовое проектирование, подписанный руководителем проекта; содержание; основной текст с иллюстрационным материалом и список используемой литературы. Пояснительная записка выполняется в соответствии с правилами выполнения текстовой конструкторской документации. Формы, размеры, содержание, порядок заполнения основных надписей и дополнительных граф к ним устанавливает ГОСТ 2.104-68 «ЕСКД. Основные надписи». Содержание записки должно быть разделено на разделы, подразделы и, при необходимости, пункты и подпункты. Порядковые номера разделов, подразделов, пунктов и подпунктов обозначаются арабскими цифрами. Разделы пояснительной записки должны начинаться с нового листа и иметь порядковые номера в пределах всей записки, подразделы – в пределах каждого раздела. Номера подразделов состоят из номера раздела и подраздела, разделенных точкой. В конце номера раздела и подраздела точка не ставится. Наименование раздела должно соответствовать заданию и записывается в виде заголовка заглавными буквами. Переносы слов в заголовках не допускаются. Точку в конце заголовка не ставят. Если заголовок состоит из двух предложений, то их разделяют точкой. Наименование подразделов и пунктов записываются в виде заголовков строчными буквами (кроме первой прописной). Подпункты начинают с новой строки со строчной буквы. Список используемой литературы помещают в конце записки и включают в ее содержание. Записка выполняется со сквозной нумерацией страниц, начиная с титульного листа. На титульном листе и листе с заданием номера страниц не ставятся. Номера страниц располагаются внизу по центру страницы. Все расчеты в проекте выполняются в системе единиц СИ. Сначала записывается формула в общем виде, затем подставляются численные значения и указывается окончательный результат с соответствующей размерностью. При необходимости дается расшифровка буквенных обозначений в формуле. Результаты расчетов для удобства могут сводиться в таблицы, которые располагаются по тексту записки. На каждую таблицу в тексте необходимо давать ссылку. Например: "Зависимость скорости двигателя от момента на валу показана в таблице 2". Слово "таблица" в тексте перед номером пишется полностью. Текст записки должен сопровождаться иллюстративным материалом в виде графиков, схем, которые выполняются карандашом или на компьютере. Рисунки сопровождаются подрисуночной подписью. Рисунки, схемы, графики должны иметь пораздельную или сквозную нумерацию арабскими цифрами. Слово «Рисунок» пишется полностью. На каждый рисунок должна быть ссылка в тексте. Графический материал курсового проекта состоит из шести листов: лист 1 – Кинематическая схема механизма; лист 2 – Нагрузочная диаграмма и тахограмма работы электродвигателя; лист 3 – Естественная и искусственные механические характеристики; лист 4 – Принципиальная схема силовой части электропривода лист 5 – Математическая модель автоматизированного электропривода; лист 6 – Графики переходных процессов. Каждый лист представляет самостоятельный чертеж, имеющий основную надпись (штамп), выполненную по ГОСТ 2.104-68 «ЕСКД. Основные надписи». Оформление графической части должно соответствовать требованиям: ГОСТ 2.701 – 2008 (ЕСКД. Схемы. Виды и типы. Общие требования к выполнению); ГОСТ 2.702 – 75 (Правила выполнения электрических схем); ГОСТ 2.709 – 89 (ЕСКД. Системы обозначений в электрических схемах); ГОСТ 2.710 – 81 (ЕСКД. Обозначения буквенно-цифровые в электрических схемах). ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
Угловая частота вращения барабана (шкива)
где V – скорость подъема груза, м/с2; D – диаметр барабана (шкива), м. Угловая частота вращения промежуточного вала зубчатой передачи
Угловая частота вращения двигателя
Скорость вращения двигателя
Предварительно определяем требуемую мощность двигателя
где kз –коэффициент запаса, принимаем kз =1,3.
Обоснование выбора электродвигателя. Асинхронный электродвигатель нашёл широкое применение в промышленности благодаря простоте в обслуживании и эксплуатации, низкой стоимости, высокой надёжности и простой конструкции. Однако у таких моделей есть и недостатки: они отличаются малым пусковым моментом и большим пусковым током, плохо переносят изменения параметров сети. Для регулирования скорости необходимо использовать современные преобразователи. В промышленности асинхронные электродвигатели используются с целью привода механизмов, не предъявляющих особые требования к показателям качества электроэнергии, пусковым показателям, скольжению. По справочным данным [3, 4] предварительно выбираем асинхронный электродвигатель с короткозамкнутым ротором марки __________________. Номинальные параметры приведены в таблице 1. Таблица 1. Номинальные параметры электродвигателя
Приведение моментов инерции
Приведение моментов инерции к одной оси вращения основано на том, что суммарный запас кинетической энергии движущихся частей привода, отнесенный к одной оси, остается неизменным. При наличии вращающихся частей, обладающих моментами инерции J 1, J 2 … J 5 и угловыми скоростями ω1, ω1, ω3, можно заменить их динамическое действие действием одного момента инерции JПР, приведенного к скорости вала двигателя. Исходя из закона сохранения кинетической энергии можно записать
Тогда результирующий момент инерции, приведенный к валу двигателя можно рассчитать по формуле
Суммарный момент инерции при движении с грузом
Суммарный момент инерции при движении без груза
ВЫБОР СИСТЕМЫ УПРАВЛЕНИЯ В электроприводе для управления скоростью асинхронного двигателя с короткозамкнутым ротором используются преобразователи напряжения и частоты. Рассмотрим их разновидности, с целью выбора наилучшего варианта. При регулировании напряжения скольжение изменяется в широких пределах и потери, выделяющиеся в виде тепла в элементах роторной цепи, пропорциональны скольжению. Для изменения напряжения применяется тиристорный регулятор напряжения. Разомкнутая система «Тиристорный регулятор напряжения - Асинхронный двигатель» имеет небольшой диапазон регулирования (от 0,7∙wном до wном), замкнутая система может обеспечивать диапазон регулирования до 10:1. Переходной процесс при регулировании напряжения – очень тяжёлый в энергетическом отношении режим: потери энергии в десятки раз выше, чем за то же время в установившемся режиме. Электропривод с регулированием напряжением питания асинхронных двигателей применяется преимущественно тогда, когда момент сопротивления на валу зависит от частоты вращения по квадратичному закону (МС~ω2), а также когда при небольшом снижении частоты вращения достигается существенное снижение мощности, например для вентиляторов, воздуходувок, центробежных насосов. Поэтому управление скоростью асинхронного двигателя с помощью тиристорного регулятора напряжения неприемлем для грузоподъемных механизмов. В качестве статических преобразователей частоты наибольшее распространение получил двухзвенный преобразователь частоты со звеном постоянного тока, в котором происходит предварительное выпрямление тока с последующим инвертированием; выходная частота не связана с частотой сети и может изменяться от малых значений до нескольких тысяч герц; Эти устройства позволили экономично и точно управлять скоростью и моментом двигателя, избавиться от применения неэкономичных гидромуфт, а также сложных и дорогостоящих приводов постоянного тока. В частотно-регулируемом приводе применяются два вида управления – скалярное и векторное. При скалярном управлении одновременно изменяют частоту и амплитуду подводимого к двигателю напряжения. Для поддержания требуемых рабочих характеристик двигателя необходимо одновременно с изменением частоты изменять по определённому закону (алгоритму) и амплитуду напряжения. При этом частота является независимым воздействием, а соответствующую ей амплитуду определяют исходя из того, как при изменении частоты должны изменяться форма механической характеристики и максимальный момент привода. Векторное управление позволяет существенно увеличить диапазон и точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Векторное управление с датчиком обратной связи по скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов. Исходя из вышесказанного, выбираем для использования в разрабатываемом электроприводе преобразователь частоты с автономным инвертором напряжения.
Таблица 2 – Модели преобразователей частоты Mitsubishi Electric
Таблица 3 – Модели преобразователей частоты АВВ
Таблица 4 – Модели преобразователей частоты Schneider Electric
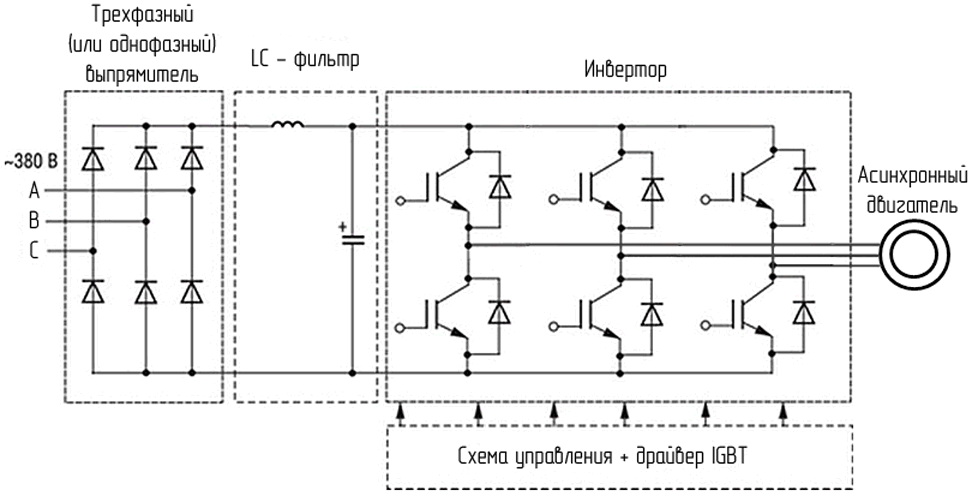
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей выполнена на транзисторах IGBT, работающих в режиме электронных ключей. Схема управления выполняется на цифровых микроконтроллерах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (защита, контроль, диагностика). Частотные инверторы Частотный регулятор имеет структуру с явно выраженным звеном постоянного тока (выпрямитель + фильтр), что показано на рис. 5. В преобразователях этого типа используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в трехфазном или однофазном выпрямителе, сглаживается LC-фильтром, а затем вновь преобразуется инвертором в переменное напряжение регулируемой частоты и амплитуды.
Рис. 5. Структурная схема преобразователя частоты со звеном постоянного тока
Преобразователи частоты на транзисторах IGBT по сравнению с тиристорными при одинаковой выходной мощности отличаются меньшими габаритами, сниженной массой и повышенной надежностью в силу модульного исполнения электронных ключей и лучшего отвода тепла с поверхности силового модуля. Они имеют более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность повреждений и отказа электропривода. Напряжение питающей сети с постоянной частотой и амплитудой (Uвх = const; fвх = const) поступает на трехфазный или однофазный выпрямитель. Выпрямитель и фильтр входят в состав блока постоянного тока, основное назначение которого – получить на выходе постоянное напряжение с малыми пульсациями, которое используется для питания преобразователя частоты. Инвертор преобразует постоянное напряжение в трехфазное напряжение с переменной частотой и изменяемой амплитудой. Схема управления формирует сигналы для коммутации обмоток электродвигателя в нужные моменты времени. Импульсы коммутации каждой обмотки в пределах периода модулируются по синусоидальному закону. Максимальную ширину импульсы имеют в середине полупериода. К началу и к концу полупериода ширина импульсов уменьшается. Таким образом, схема управления формирует широтно-импульсную модуляцию (ШИМ) напряжения, которое подается на обмотки электродвигателя. В некоторых случаях к выходам преобразователя частоты подключается фильтр, но в частотных инверторах на транзисторах IGBT необходимость в выходном фильтре практически отсутствует. Таким образом, на выходе инвертора формируется трехфазное напряжение переменной частоты и амплитуды (fвых = Var; Uвых = Var), которое и задает нужную частоту вращения и требуемый момент на валу двигателя.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ 1. Автоматизированный электропривод/ Под общ. ред. Н. Ф. Ильинского, М. Е. Юнькова. - М.: Энергоатомиздат, 1990. - 544 с. 2. Асинхронные двигатели серии 4А: Справочник/ А. Э. Кравчик, М. М. Шлаф, В. И. Афонин, Е. А. Соболевская. - М.: Энергоатомиздат, 1982. - 504 с. 3. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода: Учебник для вузов. -М.: Энергия, 1983.-352с. 4. Ключев В. И. Теория электропривода: М.: Энергоатомиздат, 1985. – 560 с. 5. Ключев В. И., Терехов В. М. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов. - М.: Энергия, 1980. – 360 с. 6. Москаленко В. В. Автоматизированный электропривод: Учебник для вузов. -М.: Энергоатомиздат, 1986. -416 с. 7. Соколов М. М. Автоматизированный электропривод общепромышленных механизмов.- М.: Энергия, 1976.-488с. 8. Справочник по электрическим машинам: В 2 т./ Под общ. ред. И. П. Копылова и Б. К. Клокова. Т. 1. - М.: Энергоатомиздат, 1988. - 456 с. 9. Чиликин М. Е. Теория автоматизированного электропривода: Учебное пособие для вузов / Чиликин М. Е., Ключев В. И., Сандлер А. С. - М.: Энергия, 1979.-616 с. 10. Чиликин М. Е., Сандлер А. С. Общий курс электропривода: Учебник для вузов. - 6-е изд., перераб. и доп. - М.: Энергоиздат, 1981. - 576 с. ПРИЛОЖЕНИЕ 1 Исходные данные по вариантам
Кафедра «Электрическая техника»
К.В. Хацевский
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-25; просмотров: 362; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.141 (0.013 с.) |

 , (16)
, (16) , (17)
, (17) , (18)
, (18) . (19)
. (19) , (20)
, (20) , о.е.
, о.е.
 , о.е.
, о.е.
 , о.е.
, о.е.
 , о.е.
, о.е.
 . (21)
. (21) (22)
(22) (23)
(23) (24)
(24)