Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Свойства объектов регулированияСодержание книги
Похожие статьи вашей тематики
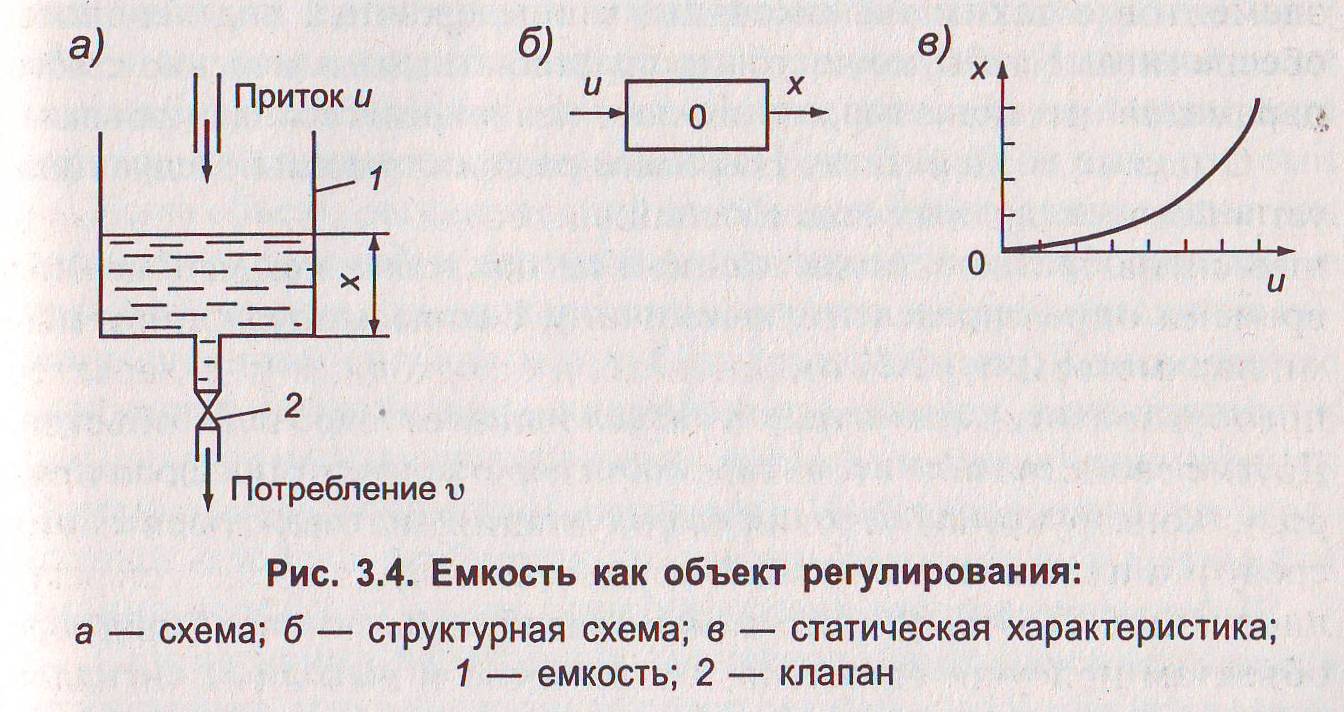
Поиск на нашем сайте Объект регулирования является элементом АСР, и свойства всей системы во многом определяются свойствами объекта. Изучение свойств объектов регулирования — важный и часто основной этап разработки АСР. Объект регулирования в отличие от остальных элементов АСР является заранее заданным элементом, свойства которого определяются его значением в технологическом процессе. Поэтому создание АСР сводится к подбору остальных элементов с такими свойствами, чтобы свойства всей системы обеспечивали требуемую точность стабилизации регулируемого параметра, что невозможно сделать без знания свойств объекта. С позиций теории регулирования объект рассматривают как устройство, преобразующее по определенному закону свои входные сигналы в выходные. Состояние объекта в каждый момент времени определяется его выходными сигналами (регулируемыми параметрами), зависимость которых от входных (т. е. характер преобразования сигналов) и обусловливает свойства объекта. Другие свойства объектов, характеризующие их физическую природу, конструкцию, условия эксплуатации, находящуюся в них среду и т. п., как указывалось, несущественны для процессов регулирования. Поэтому часто самым различным по своей природе объектам присущи одинаковые зависимости выходных сигналов от входных. Как было показано в разд. 3.1, при управлении инженерными системами их разбивают на элементарные объекты регулирования, как правило, с одним регулируемым и одним регулирующим параметрами. Управление такими объектами осуществляется одноконтурными АСР. Поэтому здесь будут рассматриваться свойства только объектов регулирования с одним выходным сигналом. Принято различать статические и динамические свойства объектов регулирования. Статические свойства объекта — это его свойства в установившемся состоянии (в статике), т. е. при неизменяющихся входном и выходном сигналах. При этом зависимость установившегося значения выходного сигнала от входного называется статической характеристикой объекта. В качестве примера рассмотрим статическую характеристику емкости 1 с притоком и потреблением жидкости, выходным сигналом которой является уровень (рис. 3.4, а). На линии потребления установлен клапан 2 с постоянным проходным сечением, а после клапана происходит свободный слив жидкости. В этом случае расход на потреблении и уже не является входным сигналом объекта, как для емкости на рис. 3.2, так как он не может изменяться произвольно, а зависит от уровня в емкости х, т. е. от выходного сигнала. Из гидравлики известно, что эта зависимость имеет вид υ= где k — коэффициент пропорциональности, зависящий от пропускной способности клапана.
Таким образом, в данном примере объект имеет один входной сигнал — расход на притоке и и один выходной — уровень в емкости х (рис. 3.4, б). В состоянии равновесия объекта приток и потребление должны быть одинаковы и постоянны. Следовательно, заменяя в формуле (3.1) υ на и и решая это уравнение относительно х, получим зависимость установившегося значения уровня х от постоянного расхода на притоке и, т. е. статическую характеристику объекта: х = и2 / k2 (3.2) Эта статическая характеристика приведена на рис. 3.4, в. Как отмечалось, в реальных условиях любой объект регулирования подвержен воздействию случайных возмущений и поэтому всегда находится в неустановившемся состоянии. Следовательно, статическая характеристика объекта регулирования не может полностью характеризовать его поведение в реальных условиях. С помощью этой характеристики можно определить лишь статическую ошибку АСР. Поведение же объекта в неустановившемся состоянии (в динамике) зависит от его динамических свойств. Динамические свойства объекта проявляются только при изменении его входных сигналов. При этом и выходной сигнал будет изменяться во времени. Причем в зависимости от характера изменения входных сигналов выходной сигнал одного и того же объекта может изменяться по-разному. Поэтому для характеристики динамических свойств объекта нельзя построить зависимость выходного параметра от входного, аналогичную статической характеристике. Для выявления динамических свойств объекта необходимо узнать его реакцию на какой-либо определенный вид входного воздействия. Чтобы можно было сравнивать динамические свойства различных объектов, применяют одинаковые стандартизованные входные воздействия. Наиболее распространены следующие два вида стандартных воздействий: • скачкообразные, когда входной сигнал изменяют мгновенно, скачком на определенную величину, а затем поддерживают постоянным (рис. 3.5, а); • импульсные, когда входной сигнал изменяют на очень большую величину в течение очень короткого промежутка времени, а затем возвращают к прежнему значению; такая форма воздействия имеет вид импульса (рис. 3.5, б). До подачи стандартного воздействия объект должен находиться в состоянии равновесия, т. е. его входной и выходной сигналы должны быть постоянными во времени. Зависимость выходного сигнала объекта во времени начиная с момента подачи стандартного воздействия называется динамической характеристикой или переходным процессом. Графики типичных переходных процессов
в промышленных объектах регулирования при скачкообразном входном воздействии приведены на рис. 3.6, где через х обозначен выходной сигнал, а через t — время. Рассмотрим для примера переходный процесс в емкости с притоком и потреблением жидкости (см. рис. 3.5). До подачи стандартного воздействия по расходу на притоке объект находится в состоянии равновесия: приток и потребление одинаковы. Увеличим расход на притоке скачком (см. рис. 3.6, а). Тогда в емкости начнется накопление жидкости и уровень в ней будет возрастать. Скорость роста уровня зависит от разности расходов на притоке и потреблении υ — и, и она тем больше, чем больше эта разность. С другой стороны, с ростом уровня в емкости сразу же начнется и увеличение расхода и через клапан в соответствии с формулой (3.1). Следовательно, разность расходов на притоке и потреблении будет уменьшаться, а рост уровня замедляться. Увеличение уровня прекратится, когда потребление снова сравняется с притоком и тем самым будет достигнуто новое состояние равновесия. Описанный переходный процесс x(t) показан на рис. 3.6, б. Если объект регулирования имеет несколько входных сигналов (регулирующий и возмущающие параметры), то переходные процессы в нем при подаче стандартного воздействия по каждому входному сигналу могут быть различными. В этом случае различают воздействия, поданные по каналу регулирования (изменяется регулирующий параметр) или по каналу возмущения (изменяется возмущающий параметр). Наиболее интересен переходный процесс в объекте по каналу регулирования, так как именно через этот канал осуществляется прямая связь в АСР. При изучении переходных процессов необходимо принимать во внимание, что всегда существуют реальные возмущающие воздействия, вызывающие случайные колебания выходного сигнала объекта. Чтобы четко выявить переходный процесс на фоне случайных колебаний, стандартные воздействия, очевидно, должны быть значительно более сильными, чем случайные воздействия на объект. Именно по этой причине стандартные воздействия имеют вид скачка или импульса, т. е. мгновенно, а значит и наиболее резко, изменяются входные сигналы. Величину скачкообразного или импульсного воздействия выбирают такой, чтобы, с одной стороны, получить заметный переходный процесс, а с другой — не допустить возникновения аварийного режима работы. Переходные процессы являются универсальным средством изучения динамических свойств объектов. Чтобы понять, как в переходном процессе проявляются динамические свойства объекта и как
их можно установить по виду процесса, рассмотрим типичные динамические свойства объектов и соответствующие им переходные процессы. Почти все объекты регулирования обладают инерцией, которая проявляется в том, что при мгновенном изменении входного сигнала выходной сигнал изменяется не мгновенно, а постепенно. Изменение выходного сигнала продолжается и после прекращения входного воздействия, т. е. когда входной сигнал уже не изменяется. Такое явление называется последействием. Примеры графиков переходных процессов для инерционных объектов показаны на рис. 3.6, б, в. Инерция присуща объектам и протекающим в них процессам самой различной природы. Например, постепенное изменение уровня в емкости после скачкообразного или импульсного изменения притока жидкости — проявление гидродинамической инерции. У некоторых объектов инерция может быть пренебрежимо малой в сравнении с остальными элементами САР и не оказывает заметного влияния на процесс регулирования. Такие объекты называют безынерционными. В идеальном безынерционном объекте выходной сигнал изменяется синхронно с входным без всякого последействия, как показано на рис. 3.6, г. Инерция реальных объектов регулирования вызвана наличием в них запаса вещества или энергии. Чем. больше этот запас, тем сильнее проявляется инерция объекта. Так, инерция емкости обусловлена запасом жидкости в ней. Способность объекта накапливать вещество или энергию называется емкостью и является количественной мерой инерции. При переходных процессах в инерционных объектах запас вещества или энергии в них может изменяться как монотонно (только увеличиваться или только уменьшаться), так и колебательно. Например, груз, подвешенный на пружине, при отклонении его от положения равновесия начинает колебаться. Такой же колебательный характер имеет величина тока в электрическом колебательном контуре. Общим для этих примеров является колебательный характер выходных сигналов объектов — положения груза и тока в электрическом контуре. Объекты, обладающие таким свойством, называются колебательными. В отличие от них объекты с монотонным изменением выходных сигналов называются апериодическими (неколебательными). Примеры переходных процессов в апериодических объектах регулирования приведены на рис. 3.6, б, в, в колебательном объекте — на рис. 3.6, д. Еще одним важным свойством реальных объектов является запаздывание. Оно проявляется в том, что реакция объекта на входное воздействие, т. е. изменение его выходного сигнала, запаздывает по отношению к изменению входного сигнала. График переходного процесса с запаздыванием приведен на рис. 3.6, е. Мы рассматривали объекты регулирования, в которых переходные процессы заканчиваются установившимся значением выходного сигнала (пунктирная линия на рис. 3.6, б, в, д, е). Такие объекты под влиянием входного воздействия переходят из одного состояния равновесия в другое (отсюда и название процесса — переходный). Эти объекты регулирования получили название устойчивых. Все рассмотренные выше переходные процессы присущи устойчивым объектам. Устойчивые объекты регулирования обладают одним общим свойством — самовыравниванием, т. е. способностью переходить из одного установившегося состояния в другое по окончании переходного процесса при скачкообразном входном воздействии. Чем меньше изменяется выходной сигнал в переходном процессе при одном и том же скачкообразном входном воздействии, тем больше степень самовыравнивания объекта. Существуют устойчивые объекты с очень большим самовыравниванием, когда выходной сигнал после переходного процесса почти не отличается; от его начального значения. График статической характеристики таких объектов расположен почти горизонтально, т. е. в установившемся состоянии выходной сигнал очень слабо зависит от входного. В инженерных системах зданий имеются объекты и с очень малым самовыравниванием, когда малейшее изменение входного / сигнала вызывает значительное изменение выходного сигнала. Устойчивость — широко распространенное в строительстве, но не обязательное свойство объектов: существуют и неустойчивые объекты регулирования. У таких объектов состояние равновесия существует, но оно неустойчиво, поэтому любое сколь угодно малое воздействие выводит неустойчивый объект из состояния равновесия и с течением времени он все больше отклоняется oт этого состояния. Переходный процесс в неустойчивом объекте показан на рис. 3.6, ж. Неустойчивые объекты довольно редки. Значительно чаще встречаются так называемые нейтральные объекты, занимающие; промежуточное положение между устойчивыми и неустойчивыми. Свойства нейтрального объекта рассмотрим сначала на примере. Нейтральный объект можно получить из рассмотренной выше емкости с притоком и потреблением жидкости, если расход на потреблении сделать независимым от уровня в емкости. Для этого достаточно, например, установить на линии потребления насос с постоянной производительностью (см. рис. 3.2). У такого объекта существует состояние равновесия: когда приток равен потреблению, уровень не изменяется. Однако в отличие от устойчивого объекта (емкости с клапаном на линии потребления — см. рис. 3.4) равенство притока и потребления может соблюдаться при любом значении уровня. Иначе говоря, в состоянии равновесия объекта его выходной сигнал — уровень — может быть любым независимо от расхода на притоке и потреблении, т. е. статической характеристики у такого объекта нет. Поэтому нейтральные объекты называют еще астатическими. Приложим теперь скачкообразное воздействие к расходу на притоке, например увеличим его. Так как потребление не зависит от уровня в емкости, то разность между притоком и потреблением будет оставаться постоянной и, следовательно, уровень в емкости' будет возрастать с постоянной скоростью, не стремясь ни к какому установившемуся значению. График такого переходного процесса приведен на рис. 3.6, з. Подобные свойства присущи всем нейтральным объектам. О нейтральных объектах можно сказать, что они не имеют самовыравнивания. Проанализируем теперь, как рассмотренные динамические свойства объектов проявляются в соответствующих переходных процессах. Наиболее широко распространенное свойство инерции объектов в инженерных системах, как устойчивых, так нейтральных и неустойчивых, проявляется в переходном процессе в виде плавного, без скачков изменения выходного сигнала (рис. 3.6, б, в, д, ж, з). Следствием такого поведения инерционного объекта является последствие, т. е. изменение выходного сигнала при уже не изменяющемся (после скачка) входном сигнале. Количественно инерцию объекта можно было бы охарактеризовать скоростью изменения выходного сигнала. Однако, как видно из рис. 3.6, эта скорость изменяется с течением времени, причем у одних объектов она максимальна в начальный момент времени (рис. 3.6, б), а у других — в некоторой точке а (рис. 3.6, в). Определение максимальной скорости переходного процесса позволяет ввести понятие постоянной времени, которая и служит оценкой инерции объекта. Постоянной времени Т объекта называется время, за которое его выходной сигнал х достиг бы установившегося значения в переходном процессе, если бы изменялся все время с максимальной скоростью. Как следует из определения, постоянная времени существует только у устойчивых объектов. Ее величину можно найти по графику переходного процесса. Для этого следует провести касательную к этому графику в точке максимальной скорости. Тогда постоянную времени Т находят, как показано на рис. 3.6, б, в. Такой способ обычно используется только для апериодических (неколебательных) объектов. С точки зрения управления инерция объектов имеет как положительную, так и отрицательную сторону. Положительная состоит в том, что благодаря инерционности объект не успевает реагировать на кратковременные возмущения, что облегчает стабилизацию его регулируемого параметра. С другой стороны, неизбежное при этом последействие затрудняет компенсацию возмущений в АСР по отклонению, что снижает качество стабилизации технологических параметров. Свойство колебательности объектов играет только отрицательную роль в процессе регулирования. Вследствие колебательности выходной сигнал объекта изменяется в течение переходного процесса на большую величину, чем в апериодическом объекте. Это видно из сравнения графиков переходных процессов в апериодическом (рис. 3.6, б, в) и колебательном (рис. 3.6, д) объектах. Запаздывание в объектах регулирования проявляется в сдвиге по времени начала переходного процесса относительно входного воздействия. Величина этого временного сдвига называется временем запаздывания, а само запаздывание — чистым или транспортным. При транспортном запаздывании выходной сигнал х совсем не изменяется в течение всего времени запаздыванияτТ(рис. 3.6, е). Однако эффект, похожий на запаздывание, наблюдается и в некоторых объектах без транспортного запаздывания, когда выходной сигнал х в переходном процессе сначала изменяется медленно (см. рис. 36, в). Такой эффект кажущегося запаздывания называется переходным запаздыванием. Время переходного, запаздывания τП можно найти по графику переходного процесса, как показано на рис. 3.6, в. Запаздывание, в особенности транспортное, является наиболее неблагоприятным свойством объектов с точки зрения их регулирования. Действительно, в АСР с обратной связью рассогласование, вызываемое возмущающими воздействиями на объект с запаздыванием, проявляется лишь по истечении времени запаздывания. Поэтому и регулирующее воздействие в таких АСР запаздывает по отношению к возмущающим воздействиям. Получается, что регулятор в АСР реагирует не на текущее, а на прошлое возмущение, что затрудняет его компенсацию и приводит к ухудшению стабилизации регулируемого параметра. По этой же причине объекты, имеющие переходное запаздывание, труднее поддаются регулированию. Как правило, запаздывание обычно сочетается с инерцией. Наиболее трудные для регулирования безынерционные объекты с транспортным запаздыванием встречаются редко. Установлено, что для объектов с запаздыванием качество регулирования может быть лучше при меньшем отношении времени полного запаздывания τ= τП + τТ к постоянной времени Т. Отношениеτ/ Т минимально (равно нулю) для всех объектов без запаздывания и максимально (бесконечно велико) для безынерционных с запаздыванием, когда Т= 0. Устойчивые объекты легче поддаются управлению, чем неустойчивые. Так, в любом устойчивом объекте отклонение регулируемого параметра под действием возмущения имеет вполне' определенную, не бесконечную величину (рис. 3.6, б-е). Поэтому при достаточно большом самовыравнивании, когда возмущающие воздействия вызывают малые колебания регулируемого параметра, можно обойтись без системы управления. В нейтральных же объектах, в особенности в неустойчивых, отклонение регулируемого параметра под действием возмущений с течением времени может стать сколь угодно большим. Поэтому управлять такими объектами, безусловно, необходимо. Таким образом, самовыравнивание объекта способствует управлению им и поэтому иногда называется саморегулированием. Степень самовыравнивания, как отмечалось, характеризует запас устойчивости объекта. Объекты с большим самовыравниванием имеют большой запас устойчивости и легко поддаются управлению. Объекты с нулевым самовыравниванием, т. е. нейтральные, не имеют запаса устойчивости (говорят, что они находятся на границе устойчивости). Неустойчивые же объекты обладают отрицательным самовыравниванием, и им приписывают отрицательный запас устойчивости. Следует иметь в виду, что степень самовыравнивания не полностью характеризует объект с точки зрения регулирования. Имеют значение и другие показатели, в частности отношениеτ/ Т. Так, для объекта с большим отношениемτ / Т качество стабилизации его регулируемого параметра в АСР может быть низким даже при значительном самовыравнивании.
КАЧЕСТВО РЕГУЛИРОВАНИЯ Свойства объекта регулирования всегда определяются его значением в инженерной системе, но не всегда благоприятны для управления. Поэтому задачей управления объектом можно считать изменение его свойств для уменьшения чувствительности к возмущающим воздействиям. С этой точки зрения АСР в целом можно рассматривать как объект, входными сигналами которого являются задания х зад и возмущение υ, а выходным сигналом — регулируемый параметр х (рис. 3.7). Этот объект, очевидно, должен обладать лучшими статическими и динамическими свойствами чем сам объект регулирования. Как и для объектов регулирования, для АСР также различают статические и динамические показатели. Основным статическим показателем АСР является статическая ошибка, т. е. рассогласование в установившемся состоянии. Как известно, в астатическом АСР статическая ошибка отсутствует» Поэтому можно утверждать, что астатический регулятор наилучшим образом корректирует статические свойства объекта. Динамические показатели АСР проявляются только в неустановившемся состоянии. Поэтому их можно выявить по реакции АСР на стандартные воздействия по каналам задания х зад или возмущения и, т. е. по переходным процессам в ней. Примеры; переходных процессов в АСР — изменение рассогласования при скачкообразном воздействии по каналу задания (на значение Δ х зад) и каналу возмущения — приведены на рис. 3.8. Какие свойства АСР являются идеальными с точки зрений качества стабилизации параметра? В идеальной АСР любые возмущающие воздействия (в том числе и стандартные) не должны
вызывать рассогласования. Это означает, что идеальная АСР должна быть нечувствительной к возмущениям. Отсюда следует, что в идеальной АСР статическая ошибка отсутствует, а переходный процесс таков, что площадь, заштрихованная на рис. 3,8, равна нулю. Идеальные переходные процессы в реальных АСР практически недостижимы. По отклонению переходного процесса в реальной АСР от идеального можно судить о качестве ее. работы. Для количественной оценки качества работы АСР служат показатели качества регулирования (качества переходных процессов). Одним из таких показателей в установившемся состоянии АСР является статическая ошибка. Наиболее универсальный динамический показатель, характеризующий близость АСР к идеальной, — абсолютное значение площади переходного процесса (на рис. 3.8, а эта площадь заштрихована). Наряду с абсолютной величиной площади переходного процесса часто используют такой показатель, как квадрат этой площади (при этом автоматически не учитывается знак отклонения). Оба эти показателя характеризуют одновременно и величину, и длительность рассогласования в переходном процессе. Иногда важнее длительность переходного процесса, в частности когда требуется перевести объект управления в новое состояние за минимальное время (например, при аварийном сбросе давления). В этом случае за показатель качества регулирования принимают время переходного процесса t П. В некоторых случаях главную роль играет величина рассогласования в переходном процессе. Тогда показателем качества регулирования считают максимальное рассогласование Δ х mах, называемое динамической ошибкой. В реальных условиях лучше вводить стандартное воздействие Δ х зад по каналу задания. Такие переходные процессы характеризуются теми же показателями качества, за исключением динамической ошибки. Вместо нее вводят другой показатель — перерегулирование Δ х п, определяемый, как показано на рис. 3.8, а. Указанные показатели качества равны нулю для идеальной АСР и больше нуля для любой реальной АСР. Чем эти показатели меньше, тем ближе АСР к идеальной. Свойства любой АСР, а следовательно, и качество переходных процессов в ней зависят как от свойств объекта, так и от характеристик остальных элементов АСР. Поэтому, изменяя характеристики отдельных элементов АСР, в частности регулятора, можно добиться наилучшего возможного и данных условиях качества переходного процесса (например, минимального времени). Такая АСР будет наилучшей из всех возможных для данного объекта регулирования, и ее называют оптимальной. Не следует смешивать понятия оптимальности и идеальности. Идеальная АСР практически недостижима, а оптимальная — это наилучшее приближение к идеальной. Разработка и построение оптимальных АСР обычно связаны со значительными трудностями, а сами эти АСР оказываются сложными и дорогими. Однако замечено, что даже большие отступления от оптимальной АСР обычно приводят к незначительному ухудшению качества регулирования. Такие отступления практически неизбежны, так как, во-первых, свойства, как правило, известны лишь приближенно и изменяются с течением времени; во-вторых, при изготовлении регуляторов и других элементов АСР неизбежен разброс их параметров. Поэтому в большинстве; случаев требуется наладка АСР на действующем объекте. С этой целью регуляторы снабжают органами регулировки, позволяющими изменять их настройку в достаточно широком диапазоне. Наладка АСР на действующем объекте требует высокой квалификации. Регулируемый параметр АСР под действием случайных возмущений колеблется около своего задания. В этих условиях трудно проследить влияние параметров настройки регулятора на показатель качества и определить, в какую сторону и насколько следует их изменять. Ясно, что чем меньше параметров настройки, тем проще процесс наладки АСР. Однако сложные современные АСР — комбинированные, многоконтурные — могут иметь достаточно много параметров настройки. И в этом случае бессильны опыт и интуиция самого квалифицированного специалиста. Системы, способные автоматически находить и поддерживать оптимальные значения параметров настройки, называются само- настраивающимися. Такие системы содержат элементы (устройства), автоматически изменяющие параметры настройки в нужную; сторону. Иначе говоря, самонастраивающиеся АСР автоматически изучают свойства объекта и возмущающих воздействий и приспосабливаются к ним. Автоматические системы, обладающие способностью к самообучению (помимо основной их функции — управления), называются самообучающимися или адаптивными. Самонастраивающиеся АСР — лишь один из видов адаптивных! систем. Другим частным случаем адаптивных систем являются так: называемые экстремальные, которые не только стабилизируют: регулируемый параметр около его заданной величины, но и автоматически выбирают задание, наилучшее (оптимальное) для всей инженерной системы.
|
||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 2391; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.89 (0.049 с.) |

 (3.1)
(3.1)