
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
В. Ограничитель смещения хомута автомата перекосаСодержание книги
Поиск на нашем сайте
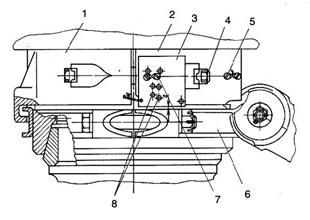
Ограничитель смещения хомута автомата перекоса предотвращает сход деформированного хомута с посадочного места втулки несущего винта, а также сигнализирует о появлении деформации кронштейна хомута. Ограничитель состоит их двух полуколец, стягиваемых болтами.
Рис.6.6. Ограничитель смещения хомута поводка автомата перекоса 1 – Полукольцо; 2 – Полукольцо; 3 – Пластина; 4 – Стяжной болт;
На полукольце имеется прилив, который охватывает при установке ребро хомута поводка автомата перекоса. На двух диаметрально противоположных плоских поверхностях полукольца с помощью двух латунных винтов крепятся пластины, которые закрывают окрашенные в красный (оранжевый) цвет участки. При деформации кронштейна хомута деформированная часть кронштейна смещается вверх и нажимает на ребро пластины. При этом латунные винты срезаются, и пластина падает вниз, зависнув на контровочной проволоке. Обнажившийся участок, окрашенный в красный (оранжевый) цвет, сигнализирует о наличии деформации кронштейна поводка. Путевое управление В состав путевого управления входят педали летчика и летчика-штурмана параллелограммного типа, на опорных площадках которых смонтированы гашетки для отключения канала «НАПРАВЛЕНИЕ» автопилота, проводка управления, включающая в себя систему тяг и качалок, участок тросовой проводки с втулочно-роликовой цепью, гидроусилитель РА-60Б, механизм загрузки с электромагнитным тормозом ЭМТ‑2М, агрегат управления, механизм изменения шага рулевого винта и система подвижного упора управления СПУУ-52-1, СПУУ-52-3.
Система подвижного упора управления СПУУ-52-1 (СПУУ-52-3). А. Назначение и состав системы Система подвижного упора управления предназначена для автоматического изменения положения упора, ограничивающего максимальную величину угла установки лопастей рулевого винта в зависимости от плотности воздуха с целью предохранения винта и трансмиссии от перегрузок. При уменьшении плотности воздуха максимальный угол установки лопастей рулевого винта увеличивается, при увеличении плотности — уменьшается, при этом обеспечивается необходимый запас путевого управления,
Рис.6.8. Принципиальное устройство системы подвижного упора управления
В состав системы входят: 1. Механизм подвижного упора, расположенный в редукторном отсеке на стенке контейнера расходного бака и состоящий из: Ø подвижного упора с микровыключателем; Ø датчика обратной связи ДОС-6; Ø исполнительного механизма МП-100М с полным ходом штока 41-42мм; Ø тяги, идущей от педалей к золотнику гидроусилителя. 2. Приемник температуры П-1, установленный на входе в вентиляторную установку. 3. Датчик барометрического давления воздуха ИКД-27Да, установленный под полом кабины экипажа. 4. Переключатель «СПУУ-52» принудительной уборки упора, расположенный на левом боковом пульте. 5. Блок управления БУ-32, на передней панели которого расположены: - - красная кнопка-табло «ОТКЛ», сигнализирующая об отключении системы и служащая для ее проверки; - ручка центрирования, служащая для проверки исправности электроцепей блока управления; - нажимной переключатель имитации сигналов по температуре и давлению для проверки системы.
Б. Работа системы Система работает при наличии постоянного 27В и переменного 36В тока и включенном переключателе «СПУУ-52». Блок управления в этом случае подключается к сети постоянного тока, а переменный ток подается на блок управления независимо от положения переключателя «СПУУ-52». При изменении плотности воздуха сигналы от датчиков температуры и давления поступают в блок управления. Сюда же поступает сигнал с датчика обратной связи. В блоке управления все сигналы суммируются, и, если положение подвижного упора не соответствует плотности воздуха, формируется сигнал рассогласования, который в виде напряжения подается на электромеханизм МП-100. Этот механизм устанавливает упор в положение, соответствующее данным условиям. На высотах, близких к уровню моря, при средних и низких температурах наружного воздуха стрелка нулевого индикатора перемещается вправо. При малых значениях плотности стрелка может находиться в крайнем левом или близком к нему положении. При работе системы от автопилота в режиме «ПЕРЕГОНКА» (движение правой педали вперед) срабатывает микровыключатель на подвижном упоре и отключает канал «НАПРАВЛЕНИЕ» автопилота. Движение педалей прекращается. Если на педали воздействовал летчик (канал «НАПРАВЛЕНИЕ» отключен), то при дальнейшем движении тяги упор останавливается, обеспечив дополнительный ход штока микровыключателя 1,8-2мм после срабатывания; при этом тяга проходит путь около 1мм. Дальнейшее движение тяги, еще примерно на 5мм, приводит к сжатию пружины на тяге. В момент соприкосновения торцов втулок возможность движения тяги исчезает, и тяга становится на жесткий упор. На вертолетах оборудованных гидроусилителями КАУ-115 режим «Перегонка» отсутствует. В зависимости от плотности наружного воздуха максимально возможный угол установки лопастей рулевого винта при полностью выдвинутом штоке составляет 16055'-17045', а максимально возможный угол установки — 22040'-23020'. При установке переключателя «СПУУ-52» в положение «ОТКЛ» напряжение 27В снимается с блока управления (загорается красная кнопка-табло «ОТКЛ») и подается непосредственно на электромеханизм МП-100, устанавливающий подвижный упор на максимальный угол установки лопастей. Переменное напряжение в этом случае с блока управления не снимается, и нулевой индикатор показывает положение упора. Проверка системы Для включения и проверки системы подвижного упора необходимо: -после запуска двигателей при включенном АЗС «СПУУ‑52» на правой панели выключатель «СПУУ-52» на левом щитке электропульта установить в положение «ВКЛ»; -педали поставить в нейтральное положение; -нажать кнопку-табло «ОТКЛ», проконтролировать ее загорание и, не отпуская кнопку, установить нажимной переключатель имитации сигналов в положение «ТЕМПЕРАТУРА» - планка индикатора нуля должна переместиться на правую промежуточную отметку, затем - в положение «ДАВЛЕНИЕ» - планка должна переместиться на левую отметку; -отпустить кнопку-табло, она должна погаснуть, а планка индикатора нуля должна занять среднее положение; -вновь нажать кнопку-табло «ОТКЛ» и, не отпуская ее, поворотом ручки «КОНТРОЛЬ» установить планку индикатора в крайнее правое положение; -выключить выключатель «СПУУ-52» и отпустить кнопку, - планка индикатора должна переместиться в крайнее левое положение, а кнопка-табло должна продолжать гореть; -включить выключатель «СПУУ-52», нажать кнопку «ОТКЛ» и, не отпуская ее, ручкой «КОНТРОЛЬ» установить планку индикатора нуля в среднее положение.
6.6.Управление пружинными механизмами загрузки Все гидроусилители включены в систему управления вертолетом по необратимой схеме (усилия с органов управления не передаются на рычаги управления). Поэтому для создания усилий на рычагах, а также для снятия этих усилий при установившемся режиме полета в системы продольного, поперечного и путевого управления установлены пружинные механизмы загрузки с электромагнитными тормозами ЭМТ‑2М. Механизмы установлены на задней стенке шпангоута 5Н. При перемещении рычагов управления пружины в механизмах сжимаются или растягиваются, создавая усилия на рычагах или педалях. Чем больше их отклонения, тем большее усилие при этом ощущает летчик.
Рис. 6.10. Пружинный механизм загрузки 1 – Ушковый наконечник; 2 – Стакан; 3 – Направляющая втулка; 4 – Цилиндр; Максимальные усилия в конце хода рычагов управления не должны превышать: § в продольном управлении 8,6кг; § в поперечном управлении 6,0кг; § в путевом управлении 13кг. Электромагнитный тормоз ЭМТ-2М предназначен для снятия нагрузки с ручки продольно-поперечного управления и педелей на установившихся режимах полета при нажатии кнопки «ТРИММЕР» на ручке продольно-поперечного управления.
Рис. 6.11. Схема объединенного управления 1 – Ручки Шаг-Газ; 2 – Рычаги раздельного управления двигателями; 4 – Дифференциальный узел; 6 – Тяги управления общим шагом; 8 – Агрегат управления; 9 – Гидроусилитель КАУ-30Б;
6.7. Объединенное управление общим шагом несущего винта и двигателями Объединенное управление общим шагом несущего винта и двигателями предназначено для изменения силы тяги несущего винта с одновременным изменением мощности двигателей для поддержания частоты вращения несущего винта без значительных изменений. Управление общим шагом несущего винта и двигателями осуществляется от ручки «ШАГ-ГАЗ», кинематически связанной с ползуном автомата перекоса и одновременно с рычагами насосов-регуляторов, установленных на двигателях. Объединенное управление двигателями осуществляется, кроме того, и рукояткой коррекции, расположенной в верхней части рычага «ШАГ-ГАЗ».
Рис. 6.12. Левая ручка ШАГ-ГАЗ и РУДы 1 – Кронштейн; 2 – Рычаги раздельного управления двигателями; На рукоятке рычага «ШАГ-ГАЗ» расположены: Ø кнопка выключения фрикциона рычага «ШАГ-ГАЗ»; Ø кнопка управления фарами; Ø кнопка тактического сброса груза с внешней подвески; Ø кнопка аварийного сброса груза с внешней подвески; Ø нажимной переключатель перенастройки частоты вращения несущего винта. Дисковый фрикцион с электрогидравлическим управлением надежно удерживает рычаг «ШАГ-ГАЗ» в любом положении. Сила затяжки фрикциона регулируется маховичком, установленным на оси рычага «ШАГ-ГАЗ». При вращении маховичка по часовой стрелке (со стороны летчика) сила сжатия пружин уменьшается. При нормально затянутом и включенном фрикционе усилия перемещения рычага «ШАГ-ГАЗ» должны быть в пределах 20-25кг. При выключенном фрикционе — не более 1,5кг. Правый рычаг «ШАГ-ГАЗ» жестко связан с левым, и, в отличие от него, не имеет фрикционного устройства и кнопки тактического сброса груза с внешней подвески. Диапазон отклонения рычага «ШАГ-ГАЗ» составляет 560. Крайние положения ограничиваются регулируемыми упорами. Полный угол поворота рукоятки коррекции равен 900 и ограничивается двумя винтами. Поворотная рукоятка имеет фрикцион, состоящий из набора дюралюминиевых дисков, пружин и муфты. При затяжке муфты пружина фрикциона зажимает диски и фиксирует рукоятку коррекции в необходимом угловом положении. Проводка системы управления общим шагом НВ проходит параллельно проводке продольно-поперечного управления и включает в себя: Ø систему тяг и качалок; Ø валы; Ø дифференциальный узел, предназначенный для подсоединения проводки раздельного управления двигателями к проводке управления двигателями от рычага «ШАГ-ГАЗ» и суммирования их перемещений.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 2418; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.237.203 (0.006 с.) |



 нулевой индикатор, показывающий положение подвижного упора (смещение подвижного индекса влево соответствует увеличению запаса хода правой педали);
нулевой индикатор, показывающий положение подвижного упора (смещение подвижного индекса влево соответствует увеличению запаса хода правой педали);
 При подаче питания к электромагнитному тормозу его электромагнитная муфта освобождает поводок, который под действием усилия со стороны пружинного механизма поворачивается и занимает нейтральное положение, снимая тем самым усилие с рычагов управления.
При подаче питания к электромагнитному тормозу его электромагнитная муфта освобождает поводок, который под действием усилия со стороны пружинного механизма поворачивается и занимает нейтральное положение, снимая тем самым усилие с рычагов управления.



