Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Б. Принцип работы гидроусилителя КАУ-ЗОБСодержание книги
Поиск на нашем сайте
При ручном управлении отклонение ручки управления в ту или другую сторону через качалку вызывает соответственное перемещение золотника ручного управления, и жидкость из основной (дублирующей) системы поступает в одну из полостей силового цилиндра, перемещая исполнительный шток. При движении силового штока перемещается и головка усилителя, которая перекрывает проточки золотника при остановке ручки управления. При комбинированном управлении, включение которого производится включением автопилота и одновременным открытием крана ГА-192, убирается конический запор, и головка агрегата получает возможность перемещаться относительно штока (в пределах хода поршня в цилиндре комбинированного управления). По сигналу от автопилота поляризованное реле РЭП-8Т через управляющий золотник перемещает распределительный клапан, соединяющий при этом одну из полостей цилиндра комбинированного управления с подводом давления. Корпус КАУ перемещается относительно золотника, и далее работа системы аналогична режиму ручного управления.
Выключение комбинированного управления осуществляется выключением автопилота (в гидроусилителе общего шага - еще и кнопкой расстопаривания фрикциона ручки «ШАГ-ГАЗ»). При этом механизм возврата головки устанавливает ее в нейтральное относительно поршня комбинированного управления положение, и головка гидроусилителя стопорится стопором.
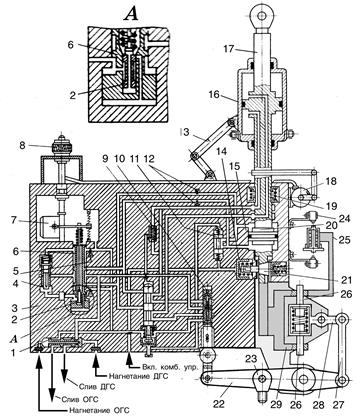
рис. 7.3. Агрегат КАУ-30Б. Принципиальная схема 1 – Клапан переключения с ОГС на ДГС; 2 – Управляющий золотник; 3 – Корпус головки; 4 – Редукционный клапан; 5 – Дроссель; 6 – Распределительный клапан автопилотного управления; 7 – Поляризованное реле; 8 – Штепсельный разъем; 9 – Клапан кольцевания полостей силового цилиндра; 10 – Распределительный золотник ручного управления; 11 – Клапан кольцевания полостей цилиндра комбинированного управления; 12 – Дроссель; 13 – Шлиц-шарнир; 14 – Клапан включения комбинированного управления со стопорным устройством; 15 – Цилиндр; 16 – Силовой цилиндр; 17 – Исполнительный шток; 18 – Потенциометр ИПБ-45-1; 19 – Механизм возврата головки агрегата в нейтральное положение; 20 – Поршень; 21 – Конический стопор; 22 – Входная качалка; 23 – Наконечник для тяги управления.
При отказе гидросистемы, когда отсутствует давление в основной и дублирующей гидросистемах, гидроусилитель преобразуется в жесткую тягу проводки управления. Для этого клапан кольцевания силового цилиндра закольцовывает его полости через распределительный золотник ручного управления, что дает возможность при неработающей системе вручную через командные рычаги и цепи управления вертолетом воздействовать на перемещение распределительного золотника, а от него через корпус головки — на положение исполнительного штока, и далее — на управляемые органы.
В. Гидроусилитель РА-60Б Гидроусилитель РА-60Б является гидроэлектромеханическим силовым исполнительным механизмом, установленным в системе путевого управления вертолетом. По устройству, принципу действия и схеме работы РА-60Б аналогичен гидроусилителю КАУ-З0Б и отличается от последнего тем, что имеет специальный механизм перегонки, другой профиль лысок распределительного золотника ручного управления и увеличенный до 2,1мм диапазон его хода. Механизм перегонки (механизм отключения обратной связи «исполнительный шток — распределительный золотник ручного управления») позволяет расширить диапазон работы гидроусилителя при комбинированном управлении, то есть при необходимости обеспечить полный ход исполнительного штока от электрических сигналов автопилота при комбинированном управлении. Механизм перегонки состоит из качалки, скобы, тяги и двух микровыключателей. Г. Принцип работы гидроусилителя РА-60Б Гидроусилитель РА-60Б может работать: — в ручном (ножном) режиме; — в режиме комбинированного управления (как от сигналов автопилота, так и от ножного управления); — в режиме отсутствия давления рабочей жидкости в гидросистеме; — в режиме перегонки.
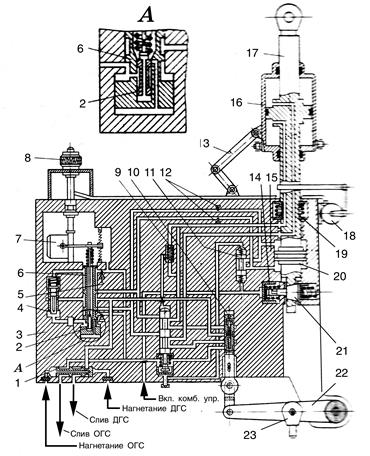
Рис. 7.4. Рулевой агрегат РА-60Б. Принципиальная схема 1 – Клапан переключения с ОГС на ДГС; 2 – Управляющий золотник; 3 – Корпус головки; 4 – Редукционный клапан; 5 – Дроссель; 6 – Распределительный клапан автопилотного управления; 7 – Поляризованное реле; 8 – Штепсельный разъем; 9 – Клапан кольцевания полостей силового цилиндра; 10 – Распределительный золотник ручного управления; 11 – Клапан кольцевания полостей цилиндра комбинированного управления; 12 – Дроссель; 13 – Шлиц-шарнир; 14 – Клапан включения комбинированного управления со стопорным устройством; 15 – Цилиндр; 16 – Силовой цилиндр; 17 – Исполнительный шток; 18 – Потенциометр ИПБ-45-1; 19 – Механизм возврата головки агрегата в нейтральное положение; 20 – Поршень; 21 – Конический стопор; 22 – Входная качалка; 23 – Наконечник для тяги управления; 24 – Микровыключатель; 25 – Пружинный упор; 26 – Регулировочные винты; 27 – Тяга; 28 – Двуплечая качалка; 29 – Скоба. В первых трех случаях схема работы РА-60Б ничем не отличается от КАУ-ЗОБ. Работа РА-60Б в режиме перегонки заключается в следующем. При работе гидроусилителя в комбинированном режиме после отработки максимального сигнала от автопилота, то есть когда шток цилиндра комбинированного управления становится на упор, пружинный упор механизма перегонки нажимает на микровыключатель, который растормаживает тормоз ЭМТ-2М, и нагрузка с педалей снимается. Одновременно вследствие разности относительного хода двуплечей качалки последняя упирается в один из регулировочных винтов на скобе механизма и через тягу поворачивает входную качалку гидроусилителя и перемещает распределительный золотник ручного управления по ходу исполнительного штока на определенную величину относительно среднего положения. Поскольку распределительный золотник обеспечивает поступление жидкости в полость силового цилиндра, исполнительный шток агрегата продолжает перемещаться в ту же сторону с постоянной небольшой скоростью. Вместе с исполнительным штоком перемещаются и педали управления. Перегонка продолжается до тех пор, пока на вход привода не поступит сигнал стабилизации обратного знака. Для изменения направления движения исполнительного штока при перегонке необходимо к педалям приложить увеличенное (15-20кг) усилие в направлении, противоположном движению исполнительного штока. Это усилие передается на входную качалку гидроусилителя, происходит перекладка золотника, и исполнительный шток перемещается в обратную сторону. При необходимости летчик может переключить управление на себя путем нажатия на гашетки педалей, в результате чего стабилизация вертолета по курсу отключается. В этом случае на гидроусилитель передается воздействие от летчика с одновременной коррекцией от автопилота. При этом комбинированное управление работает в небольших пределах, и перегонки не происходит. При снятии ног с педалей автоматически включается стабилизация вертолета по курсу.
Основная гидросистема А. Назначение системы Основная гидросистема предназначена для питания рабочей жидкостью агрегатов КАУ-З0Б поперечного и продольного управления, управления общим шагом, рулевого агрегата РА-60Б ножного управления, гидроцилиндров управления фрикционом ручки «ШАГ-ГАЗ», «форсажом» двигателей (для вертолета МИ-8МТ) и переменным упором в продольном управлении.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 2951; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.120.103 (0.006 с.) |

 Так как головка гидроусилителя имеет возможность перемещаться относительно штока с поршнем комбинированного управления на ±6 мм от нейтрального положения, (это 20% от общего хода исполнительного штока), то и органы управления от сигналов автопилота переместятся в 20%-ной зоне их общего хода. Такой диапазон управления от автопилота выбран с целью безопасности на случай отказа автопилота.
Так как головка гидроусилителя имеет возможность перемещаться относительно штока с поршнем комбинированного управления на ±6 мм от нейтрального положения, (это 20% от общего хода исполнительного штока), то и органы управления от сигналов автопилота переместятся в 20%-ной зоне их общего хода. Такой диапазон управления от автопилота выбран с целью безопасности на случай отказа автопилота.