
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приведение системы сил к данному центру (точке)Содержание книги
Поиск на нашем сайте
Теорема Пуансо о параллельном переносе силы
= P ¢ = P ¢ и линии
действия сил параллельны. Тогда получим силу P ¢ и пару сил (P, P ¢¢),
Приведение системы сил к данному центру
Рисунок 5.2 сил, моменты которых равны:
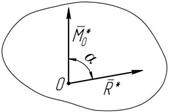
В результате приведения к центру O получим сходящуюся систему
(рисунок 5.3): * системы сил, относительно центра O
(P).
* (главный момент системы сил).
R * и главный момент * системы сил
O Хотя, по записи, главный вектор и равнодействующая одинаковы, необходимо различать эти два понятия. 1. Главный вектор не зависит от центра приведения. 2. Главный момент зависит от центра приведения, так как от его положения зависят величина и направление радиус-вектора. 3. Главный вектор заменяет систему сил только в совокупности с главным моментом, т.е. он не эквивалентен данной системе сил. 4. (однако если * ^ R * или * = 0, то данная система сил
5. Равнодействующая имеет определенную линию действия. 6. Равнодействующая одна заменяет сходящуюся систему сил, т.е. она эквивалентна ей. Для того чтобы система сил находилась в равновесии необходимо и
R * и главный момент * равнялись
R * = * = 0,
Пример приведения системы сил к заданному центру O. Пусть на твердое тело действует пространственная произвольная
(рисунок 5.4 а).
Приведем данную систему сил к заданному центру O (центр приведения), используя теорему Пуансо о параллельном переносе силы. В результате приведения получим систему сходящихся сил
центра O (рисунок 5.4 б). По величине моменты будут соответственно равны: M 1 = P 1 b; M 2 = P 2 a; M n = P n a.
Рисунок 5.4
P 1¢ , P 2¢ , …, P n ¢ можно заменить одним вектором, –
геометрической сумме:
1 2 n
+... + P = å P.
Рисунок 5.5 Векторы моментов M 1, M 2, …, M n можно заменить одним вектором,
* системы сил (рисунок 5.5 б), – равным их
+... + M = å M (P).
Возможные случаи приведения сил
R * = 0; * = 0.
R * = 0; * ¹ 0.
R * ¹ 0; * = 0.
R * ¹ 0; * ¹ 0; R * ^ M *.
* парой сил (R * , R) (рисунок 5.6 б), причем
M * = R * d или M * = R * d. O O 1
d = O .
R * Рисунок 5.6
R * ¹ 0; * ¹ 0; R * ^ M *.
Случаи I – IV возможны при расположении сил в одной плоскости.
1.
этих осей равнялись нулю. Примечание. Оси, относительно которых составляются уравнения, не должны лежать в одной плоскости и быть параллельны.
2.
См. рисунок 6.2 Для равновесия пространственной параллельной системы сил необходимо и достаточно, чтобы сумма проекций всех сил на ось параллельную линиям действия сил (ось Oz) равнялась нулю, и суммы моментов всех сил относительно двух оставшихся осей (x, y) также равнялись нулю.
3. Равновесие сходящихся систем сил, т.е. систем сил, линии действия которых пересекаются в одной точке (рисунки 6.3 и 6.4).
См. рисунок 6.3 Для равновесия пространственной сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси (x, y, z) равнялись нулю.
См. рисунок 6.4 Для равновесия плоской сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на две координатные оси (x, y или x, z или y, z) равнялись нулю. 4. Равновесие плоской произвольной системы сил, т.е. системы сил произвольно расположенных на плоскости (рисунок 6.5).
I.
II. Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы сумма проекций всех сил на любую ось, принадлежащую плоскости действия системы сил (например ось Ox), равнялась нулю, и суммы моментов всех сил относительно двух любых точек, принадлежащих данной плоскости (например точки A и B), также равнялись нулю. Примечание. Прямая AB не должна быть перпендикулярна оси Ox.
III. Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно трех произвольных точек, принадлежащих плоскости действия системы сил (например точек A, B и C), равнялись нулю. Примечание. Точки A, B и C не должны лежать на одной прямой. 5. Равновесие плоской параллельной системы сил, т.е. системы сил расположенных на плоскости, линии действия которых параллельны (рисунок 6.6). Существуют II вида (формы) условий равновесия плоской параллельной системы сил.
I. относительно какой-либо точки, принадлежащей плоскости действия системы сил (например точки O), также равнялась нулю.
II. Для равновесия плоской параллельной системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно двух произвольных точек, принадлежащих плоскости действия системы сил (например точек A и B), равнялись нулю. Примечание. Точки A и B не должны лежать на прямой параллель- ной линиям действия сил. ФЕРМА Ферма – это шарнирно-стержневая, геометрически неизменяемая конструкция. Фермы бывают плоские и пространственные. Ферма состоит из стержней (обозначенных цифрами) и узлов (обозначенных буквами). Рассмотрим плоскую ферму (рисунок 7.1).
Рисунок 7.1
1, 4, 8, 12 – стержни верхнего пояса. 2, 6, 10, 13 – стержни нижнего пояса. 3, 7, 11 – стойки. 5, 9 – раскосы.
Стержень AK называется опорным. Расстояние AB – пролет фермы. Расчет фермы сводится к определению усилий в опорах фермы и в ее стержнях под действием внешних нагрузок. Для упрощения расчета фермы принимаем некоторые допущения: 1) стержни, из которых состоит ферма, прямолинейны и невесомы; 2) узлы выполнены в виде шарниров без трения; 3) внешние нагрузки приложены к узлам. Вследствие этих допущений, усилия в стержнях направлены вдоль осей стержней, т.е. стержни работают только на растяжение или на сжатие. Перед началом расчета фермы необходимо вычислить статическую определимость фермы: k = 2 m - 3, где k – число стержней (опорные стержни не учитываются); m – число узлов. Если Если k < 2 m - 3, то ферма нежесткая. k > 2 m - 3, то ферма статически неопределима. Существует несколько методов (способов) расчета ферм: 1) метод вырезания узлов (аналитический и графический); 2) метод Риттера (метод сечений); 3) метод Максвелла-Кремоны.
Леммы о нулевых стержнях
1. Если в незагруженном узле сходятся два стержня под углом a ¹ 180°, то усилия в них равны нулю Рисунок 7.2 (рисунок 7.2): S 1 = 0; S 2 = 0. 2. Рисунок 7.3 равны между собой (рисунок 7.3): S 1 = S 2; S 3 = 0. 3. Рисунок 7.4 внешней силе (рисунок 7.4): S 1 = P; S 2 = 0. Пример. Определить нулевые стержни с помощью лемм (рисунок 7.5). BK – опорный стержень.
Рассматривая поочередно узлы E, G, C, и D получим, что стержни 9, 7, 5, 3 – нулевые, согласно второй лемме.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 244; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.008 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 Не изменяя кинематического состояния твердого тела, силу, приложенную к нему в какой-либо точке, можно переносить параллельно ей самой в любую другую точку тела, прибавляя при этом пару с моментом M, равным моменту переносимой силы относительно точки, в которую переносится сила.
Не изменяя кинематического состояния твердого тела, силу, приложенную к нему в какой-либо точке, можно переносить параллельно ей самой в любую другую точку тела, прибавляя при этом пару с моментом M, равным моменту переносимой силы относительно точки, в которую переносится сила.





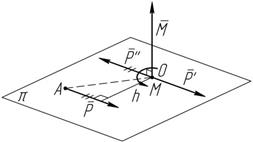 Пусть в точке A приложена сила P (рисунок 5.1). В произвольную точку O приложим уравновешенные силы P ¢ и
Пусть в точке A приложена сила P (рисунок 5.1). В произвольную точку O приложим уравновешенные силы P ¢ и
 P ¢¢ , причем P
P ¢¢ , причем P
 момент которой равен моменту силы P относительно точки O:
момент которой равен моменту силы P относительно точки O:





 M O (P)= r ´ P; M O (P)= OA ´ P; M O (P)= Ph.
M O (P)= r ´ P; M O (P)= OA ´ P; M O (P)= Ph.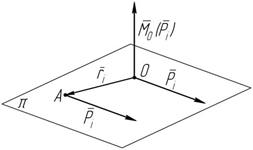 Приведем систему n сил к центру O (рисунок 5.2), для этого, на основании леммы Пуансо, перенесем каждую силу
Приведем систему n сил к центру O (рисунок 5.2), для этого, на основании леммы Пуансо, перенесем каждую силу


 M O (P i )= r i ´ P i .
M O (P i )= r i ´ P i . сил, которую можно заменить главным вектором R * и получим n число
сил, которую можно заменить главным вектором R * и получим n число

 Любую систему сил, действующую на абсолютно твердое тело, можно привести к
Любую систему сил, действующую на абсолютно твердое тело, можно привести к R * = ;
R * = ;
 = 0;
= 0;





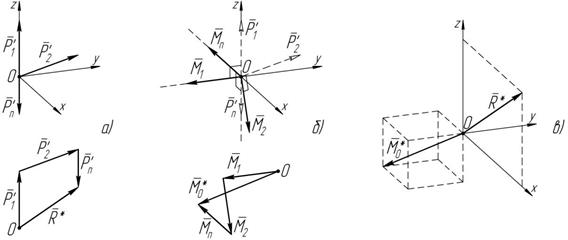






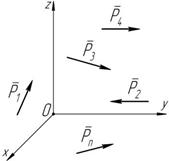 Рисунок 6.1
Рисунок 6.1
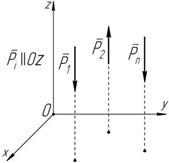 Рисунок 6.2
Рисунок 6.2
 Рисунок 6.3
Рисунок 6.3
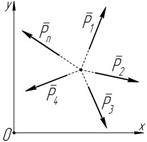 Рисунок 6.4
Рисунок 6.4
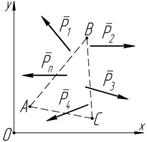 Рисунок 6.5
Рисунок 6.5
 Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на две оси, лежащие в плоскости действия системы сил, равнялись нулю, и сумма моментов относительно любой точки (например точки O), принадлежащей данной плоскости, также равнялась нулю.
Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на две оси, лежащие в плоскости действия системы сил, равнялись нулю, и сумма моментов относительно любой точки (например точки O), принадлежащей данной плоскости, также равнялась нулю. Рисунок 6.6
Рисунок 6.6
 Для равновесия плоской параллельной системы сил необходимо и достаточно, чтобы сумма проекций всех сил на ось, параллельную линиям действия сил (например Oy), равнялась нулю, и сумма моментов всех сил
Для равновесия плоской параллельной системы сил необходимо и достаточно, чтобы сумма проекций всех сил на ось, параллельную линиям действия сил (например Oy), равнялась нулю, и сумма моментов всех сил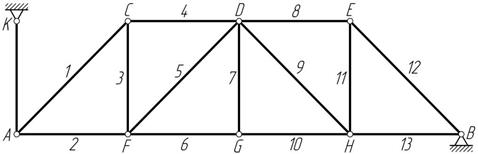
 Существуют способы позволяющие определить нагрузку в некоторых стержнях фермы без расчета.
Существуют способы позволяющие определить нагрузку в некоторых стержнях фермы без расчета. Если в незагруженном узле сходятся три стержня, причем два из них лежат на одной прямой, а третий под углом к ним (a ¹ 180°), то усилие в третьем равно нулю, а усилия в первых двух будут
Если в незагруженном узле сходятся три стержня, причем два из них лежат на одной прямой, а третий под углом к ним (a ¹ 180°), то усилие в третьем равно нулю, а усилия в первых двух будут Если в загруженном узле сходятся два стержня под углом a ¹ 180°, причем линия действия внешней силы совпадает с осью одного из стержней, то усилие во втором будет равно нулю, а в первом равно
Если в загруженном узле сходятся два стержня под углом a ¹ 180°, причем линия действия внешней силы совпадает с осью одного из стержней, то усилие во втором будет равно нулю, а в первом равно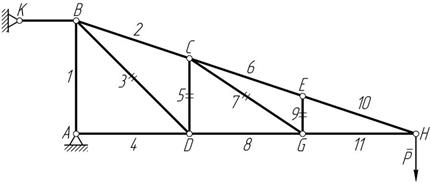 Рисунок 7.5
Рисунок 7.5


