
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение и отличительные особенности РТС навигации и посадки. Общая характеристикаСодержание книги
Похожие статьи вашей тематики
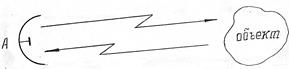
Поиск на нашем сайте Назначение и отличительные особенности РТС навигации и посадки. Общая характеристика Радиотехническими средствами (РТС) называют совокупность наземных и бортовых устройств, обеспечивающих решение основной задачи навигации и основанных на радиотехнических принципах измерений. Отличительные признаки радиосистемы: наличие радиосигнала, наличие среды, наличие приемника. Радиолокация – обнаружение, определение местоположения и выявление свойств подвижных и неподвижных объектов с использованием радиоволн, отраженных или излученных этими объектами. Радионавигация – определение местоположения объектов и обеспечение их движения по заданным траекториям с помощью радиосредств.
Основные задачи РНС и РЛС: · обнаружение – состоит в принятии решения о наличии или отсутствии объекта в заданной области пространства; · измерение координат и параметров движения – сводится к получению оценок координат объектов и их производных (скорости, ускорения); · распознавание – состоит в установлении принадлежности объекта к определенному классу.
РТС навигации предназначены для определения местоположения и/или скорости ВС и выдачи информации экипажу для обеспечения требуемой надежности и точности самолетовождения (для обеспечения выполнения задач навигации с помощью средств). РТС посадки предназначены для определения положения ВС относительно ВПП и/или заданной траектории снижения. Внедрение РТС Н и П в практику самолетовождения значительно уменьшает зависимость полетов от метеоусловий и существенно повышает безопасность полетов.
Преимущества РТС Н и П: · всепогодность и возможность применения в любое время суток и года; · высокая точность измерения навигационных параметров; · многофункциональность; · возможность использования на всех этапах полета, включая предпосадочное маневрирование и заход на посадку в сложных метеоусловиях.
Классификация РТС навигации и посадки Все РТС можно классифицировать по определенным признакам в зависимости от их назначения и применения.
По назначению РТС подразделяются на: a) навигации; b) посадки; c) применения в комплексах УВД; d) предупреждения столкновений; e) опознавания.
По виду информативного параметра радиосигнала
Если измеряемый навигационный параметр (НП – пеленг, дальность и т.д.) функционально связан с одним из параметров радиосигнала, то различают следующие виды РТС: a) b) фазовые - НП = f(φ); c) частотные – НП = f(ω); d) временные – НП = f(t).
По виду определяемого навигационного параметра (НП): a) угломерные; b) дальномерные; c) разностно-дальномерные; d) измерители линейных и угловых скоростей; e) комбинированные (угломерно-дальномерные),
По дальности действия: a) РТС ближней навигации (РСБН с дальностью действия <350…400 км); b) РТС дальней навигации (РСДН с дальностью действия < 2500…3000км); c) глобальные,
По степени автономности: a) автономные (радионавигационные устройства – РНУ); b) неавтономные (радионавигационные системы – РНС).
Основные свойства радиоволн
Радиоволны — электромагнитные волны с длинами волн, располагающимися в электромагнитном спектре вплоть до инфракрасного диапазона. К радиоволнам относят электромагнитные волны с частотами от 3 кГц до 3 ТГц, что соответствует длине волны от 100 километров до 0,1 миллиметра. Радиоволны, являясь электромагнитными волнами, распространяются в свободном пространстве со скоростью света.
В основу работы всех радиотехнических положены следующие основные свойства радиоволн: 1. Конечная и достаточно стабильная скорость распространения в однородной среде. Для инженерных расчетов её принято считать равной 3х108 м/с. 2. Постоянство направления распространения. Радиоволны распространяются по кратчайшему расстоянию между точками излучения и приема. Траектория радиоволн зависит от длины волны и различается у разных диапазонов. · Прямолинейно распространяющиеся волны (Space Waves) – это радиоволны, распространяющиеся в однородной среде по прямой линии. · Поверхностные волны (Surface Waves). Это радиоволны, способные огибать земную поверхность.
· Пространственные волны (Sky Waves). Они основаны на отражении радиоволн от ионосферы. Ионосфера – это верхние электризованные слои атмосферы.
3. Способность направленного излучения и приема. Эта способность радиоволн концентрировать энергию излучения (приема) в пределах малых телесных углов за счет применения антенных устройств специальной конструкции. Направленные свойства антенны принято характеризовать функцией диаграммы направленности.
4. 5. Эту разницу называют доплеровским сдвигом частот, и он пропорционален радиальной составляющей скорости изменения расстояния r(t), которая равна проекции вектора скорости на направление излучения.
Особенности распространения радиоволн зависят от частоты радиоволны: ü с ростом частоты (с уменьшением длины волны) поглощение энергии радиоволны в земле возрастает, а в ионосфере – уменьшается; ü с уменьшением частоты (с увеличением длины волны) возрастает дифракционная и рефракционная способность распространения радиоволн, то есть способность огибать земную поверхность и преломляться в неоднородной среде; ü с уменьшением частоты радиоволны и с увеличением угла падения волны на ионосферу возрастает отражающая способность ионосферных слоёв.
Методы измерения дальности Измерение дальности
| |||||||
| Импульсный (временной)
|
|
| ||||||
| запросный режим | беззапросный режим | запросный режим | беззапросный режим | запросный режим | беззапросный режим | |||

 амплитудные - НП = f (Еm);
амплитудные - НП = f (Еm);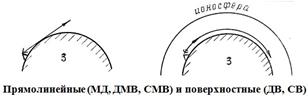


 Способность преломляться и отражаться. Отражение и преломление радиоволн как правило происходит при прохождении через границу физических сред.
Способность преломляться и отражаться. Отражение и преломление радиоволн как правило происходит при прохождении через границу физических сред.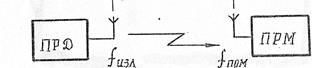 Эффект Доплера. Если между источником радиоизлучения и приемником есть взаимное изменения расстояния, то частота принимаемых колебаний fпрм будет отличаться от частоты излучаемых колебаний fизл.
Эффект Доплера. Если между источником радиоизлучения и приемником есть взаимное изменения расстояния, то частота принимаемых колебаний fпрм будет отличаться от частоты излучаемых колебаний fизл.

 метод
метод

Применяется в КРМ и ГРМ
 ПРД (передатчик) создаёт немодулированные колебания, поступающие в антенное устройство, формирующий узкий луч, который сканирует горизонтальную (КРМ) или вертикальную (ГРМ) плоскость. ДН имеет ножевидную веерообразную форму.
ПРД (передатчик) создаёт немодулированные колебания, поступающие в антенное устройство, формирующий узкий луч, который сканирует горизонтальную (КРМ) или вертикальную (ГРМ) плоскость. ДН имеет ножевидную веерообразную форму.
Лучи ДН сканируют упорядоченным образом. В некоторый момент времени (tопорн), которое известно ВС, т.к. информация передаётся радиомаяком, начинается движение луча в направлении увеличения углов Т – туда от границы сектора обзора. После достижения другой границы сектора и некоторой паузы происходит движение луча в обратном направлении О – обратно.
На ВС в те моменты времени, когда луч радиомаяка ориентирован в направлении ВС, принимается 2 импульсных сигнала Т и О. Моменты их возникновения зависят от углов положения ВС относительно биссектрисы угла сканирования.
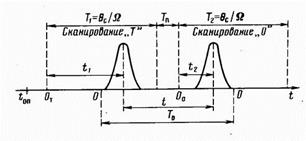
| Qс – ширина сектора сканирования Т1 – время движения луча от границы сектора в направлении туда. Для определения МС нам необходимо узнать t. t = T0 - 2Θ/Ώ |
Это выражение показывает, что угловое отклонение ВС от нулевого направления прямо пропорционально разности временного интервала между импульсами “Т” и “О” на нулевом направлении и текущим временным интервалом между этими импульсами. Так как T0 = const, временной интервал t зависит только от углового положения ВС Θ, и поэтому для определения на ВС угла Θ нужно измерить временной интервал между импульсами “Т” и “О”.
Достоинства РСП:
§ осуществление посадки всех видов ЛА;
§ мобильность системы;
§ простота использования.
Недостатки РСП:
§ невозможность доведения ЛА до точки приземления;
§ трудность наблюдения за движением ВС на близких расстояниях;
§ низкая пропускная способность;
§ сложность работы наземного персонала;
§ относительная сложность наземной радиолокационной аппаратуры.
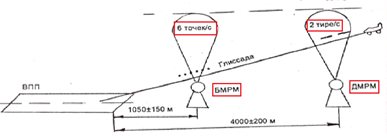
2) Оборудование системы посадки (ОСП) (упрощенные системы посадки) обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра и определение МС в 2х фиксированных точках на траектории посадки.
Достоинства УСП:
§ простота наземного оборудования и его обслуживания;
§ большая дальность действия при полетах ВС на малых высотах.
Недостатки УСП:
§ невозможность непрерывного контроля положения ВС в вертикальной плоскости относительно глиссады
§ сравнительно низкая точность выдерживания посадочного курса, вследствии невысокой точности АРК;
§ ограниченная пропускная способность (15-20 ВС в час).
3) Радиомаячные системы посадки метровых волн (РМСП МВ) позволяют задать прямолинейную пространственную траекторию захода на посадку и определить текущее МС в пространстве, а также фиксировать моменты прохода 2х,3х точек на линии глиссады, расположенных на определенном удалении от ВПП. РМСП этого типа обеспечивает задание единственной траектории – глиссады планирования и управление ВС в пределах определенных достаточно узких секторов вокруг нее.
Достоинства РМСП МВ:
§ обеспечивает возможность точной посадки и днем, и ночью, в том числе в плохих метеоусловиях
Недостатки РМСП МВ:
§ большое влияние отраженных сигналов в метровом диапазоне и как следствие возникновение искажений при наведении ЛА
§ диаграмма направленности маяков позволяет осуществлять заход на посадку только с одного фиксированного направления
§ малый угловой размер зоны действия радиомаяка не позволяет строить удобные схемы захода на посадку
§ высокая стоимость из-за сложной антенной системы
§ повышенные требования к окружающему рельефу
§ ограниченное число каналов (около 40), т.е. работающие на одной частоте маяки создают друг другу помехи
§ при высокой плотности аэродрома, выбор свободных частот бывает проблемным.
4) Радиомаячные системы посадки сантиметровых волн (РМСП СМВ) обеспечивают определение пространственных координат ВС в определенной области пространства, размеры которой значительно превосходят сектора управлений, существующих ныне РМСП и могут позволять выполнение полетов по любой криволинейной 4х мерной пространственно-временной траектории посадки.
5) Спутниковые системы посадки (GLS) предполагает использование, для решения задач автоматической посадки, дифференциальной глобальной спутниковой навигационной системы (DGPS).
DGPS позволяет использовать 2 варианта автоматической посадки, полностью отвечающих требованиям точности при заходе на посадку и посадке по 1 категории ИКАО (система наведения для местного района (LAAS) и система наведения для большой площади перекрытия (WAAS)).
Достоинства УСП:
§ простота наземного оборудования и его обслуживания;
§ большая дальность действия при полетах ВС на малых высотах.
Недостатки УСП:
§ невозможность непрерывного контроля положения ВС в вертикальной плоскости относительно глиссады
§ сравнительно низкая точность выдерживания посадочного курса, вследствии невысокой точности АРК;
§ ограниченная пропускная способность (15-20 ВС в час).
ПРС в режиме СВЯЗЬ
Приводные радиостанции – наземные передающие устройства, работающие в диапазоне средних (гектометровых) волн, на антенны ненаправленного действия.
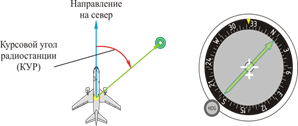
Они предназначены для целей радионавигации воздушного судна, оборудованных автоматическими радиокомпасами. С помощью приводных радиостанции и автоматического радиокомпаса на борту воздушного судна определяется курсовой угол радиостанции, что позволяет решать ряд задач воздушной навигации:
Ø полет на радиостанцию (и от нее),
Ø контроль пути по направлению,
Ø определение места воздушного судна,
Ø осуществление радиосвязи диспетчер-ВС при отказе основного оборудования связи (передача голосовых сообщений).
В состав приводных радиостанций должны входить:
· антенно-фидерная система (АФС);
· передающая аппаратура радиостанции;
· система ТУ-ТС - телеуправления,: контроля и телесигнализации;
Приводные радиостанции имеют два навигационных режима работы: ПРИВОД и СВЯЗЬ.
1) Режим СВЯЗЬ используется для установления связи с самолетами в случае отказа самолетных или наземных УКВ-радиостанций. При работе на связь передатчик может работать как в телеграфном (с разрывом несущей), так и в телефонном режиме.
При телефонном режиме чтобы убедиться, что экипаж принимает информацию, диспетчер может подать одну из команд:
· на разворот (по радиолокатору определить выполняется команда или нет)
· выключить систему опознавания(пропадание ответа на индикаторе кругового обзора)
· включить систему опознавания по радиотех. системе ближней навигации
· включить сигнал ЗНАК на самолетном ответчике УВД
Принцип работы
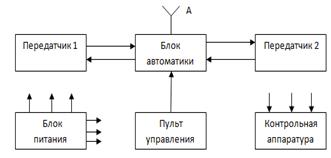 Аппаратура управления (пульт управления) и контроля (контрольная аппаратура) (АУК) служит для дистанционного и местного управления передатчиками, передачи на командно-диспетчерский пункт (КДП) сигналов о состоянии ПРС и выполнения служебных функций.
Аппаратура управления (пульт управления) и контроля (контрольная аппаратура) (АУК) служит для дистанционного и местного управления передатчиками, передачи на командно-диспетчерский пункт (КДП) сигналов о состоянии ПРС и выполнения служебных функций.
Антенная система Т-образного типа. Каждая ПРС имеет Передатчик- 1 и Передатчик-2 (основной и резервный). Блок автоматики обеспечивает включение одного из комплектов передатчиков в работу, а второго - в горячий резерв. В случае нарушения работы радиостанции переходит на аварийный передатчик.
Маркерные радиомаяки
Маркерные радиомаяки (МРМ) представляют собой передающее устройство, предназначенное для обозначения определенных пунктов на земной поверхности, важных для воздушной навигации ( исходные и конечные пункты маршрутов, места изломов воздушных трасс, воздушные входные и выходные коридоры ). В системах посадки маркерные радиомаяки применяют для обозначения точек, лежащих на оси ВПП и удаленных от ее начала на определенные расстояния. Использование сигналов таких маяков облегчает осуществление захода на посадку.
Для повышения точности маркировки заданных пунктов в МРМ используют излучение колебаний в ограниченной области пространства, что обеспечивается применением антенны направленного действия.
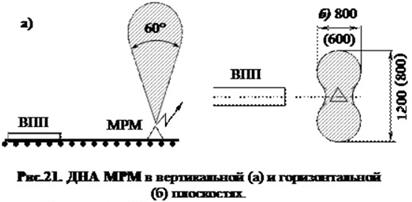 Характер излучения в вертикальной плоскости имеет форму вертикального факела.
Характер излучения в вертикальной плоскости имеет форму вертикального факела.
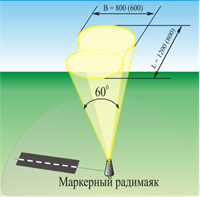
Диаграмма направленности антенны МРМ в горизонтальной плоскости имеет обычно вид фигуры, сжатой в направлении, совпадающим с осью ВПП, и вытянутой в перпендикулярном направлении. Зона действия маркерного маяка на линии курса охватывает отрезки длиной (600 ± 200) м в точках расположения внешнего и дальнего маркерного радиомаяка, (300 ± 100) м у ближнего и (150 ± 50) м у внутреннего маркерного радиомаяка.
Такая форма диаграммы излучения в горизонтальной плоскости исключает возможность пролета радиомаяка вне зоны его излучения, когда заход на посадку происходит с некоторым уклонением от оси ВПП.
Размеры сечения диаграммы излучения МРМ в горизонтальной плоскости L и B уменьшаются по мере приближения к торцу ВПП от дальнего привода к ближнему.
Все МРМ работают на несущей частоте 75 МГц. Колебания несущей частоты подвергаются амплитудной модуляции напряжением звуковой частоты.
В настоящее время в гражданской авиации используются следующие виды маркерных радиомаяков:
1. МРМ-48 – входит в состав оборудования системы посадки. Используется одна частота модуляции F мод = 3000 Гц. Сигналы опознавания: дальний радиомаяк – 2 тире/с, ближний – 6 точек/с;
2. МРМ-70, МРМ-В и МРМ-97 – соответствуют стандартам ИКАО. Используют следующие частоты модуляции и сигналы опознавания:
· внешний радиомаяк: F мод = 400 Гц; 2 тире/с;
· средний радиомаяк: F мод = 1300 Гц; 6 точек/с и 2 тире/с чередуются;
· внутренний радиомаяк: F мод = 3000 Гц; 6 точек/с.
3. Последняя разработка МРМ: ИРТЫШ-МРМ (малогабаритная =10кг).
МРМ используют излучение колебаний в ограниченной области пространства за счет применения антенны направленного действия (определяется за счет конструкции антенны (форм диаграммы направленности)).
Структурная схема МРМ
(наземное оборудование)
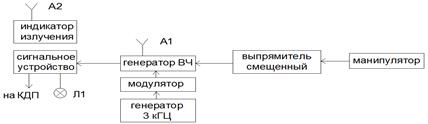
В наземное оборудование МРМ входит 2 антенны. Сигнал вырабатывается генератором с частотой 3кГц. Данный сигнал проходит через ряд преобразователей (модулятор – преобразует поступающий к нему сигнал, для формирования в определенный тип; манипулятор; выпрямитель), т.е сигнал подвергается телеграфной манипуляции сигналом «точек» или «тире» или их комбинации и поступает в генератор ВЧ. Дальше сигнал передается в сигнальное устройство, отображая на конструкторском диспетчерском пульте (КДП) световой сигнал. Антенна 2 – отдельный индикатор (у оператора).
Схема размещения РМСП МВ
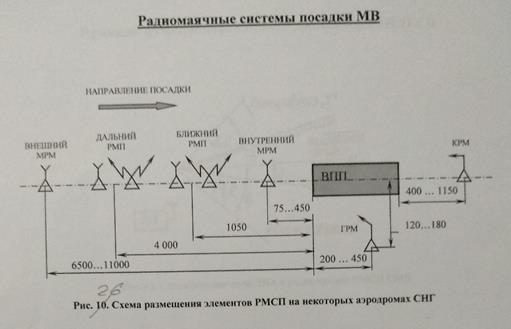
На а/д 2,3 категории со сложным рельефом местности перед порогом ВПП в состав оборудования дополнительно может входить внутренний МРМ, предупреждающий экипаж о близости порога ВПП.
На а/д со сложным рельефом в зонах захода или другими особенностями в состав РМСП может быть включен дополнительный МРМ, размещенный на удалении до 11 км от торца ВПП.
Стандарты ИКАО предусматривают использование 2х маркерных пунктов, называемых внешним (ВРП) и средним (СРП) и возможность в случае необходимости установки 3-го внутреннего. СРП – предупреждает экипаж о приближении к точке начала визуального наблюдения, внутренний – для обозначения момента пролета радиопункта по 2 категории.
РМСП МВ обеспечивает непрерывное получение на борту ВС следующей информации:
§ положение ВС относительно плоскости посадочного курса;
§ положение ВС относительно плоскости планирования (глиссады);
§ расстояние до начала ВПП по маркерному каналу
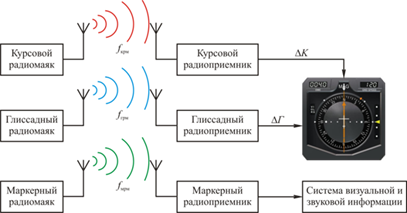
В целом основное оборудование РМСП МВ включает в свой состав наземные радиомаяки и бортовые радиоприемники, входы которых подключены к соответствующим индикаторным приборам и к системе автоматического управления полетом (САУ или АБСУ).
Структурная схема РМСП МВ
 КРМ путем излучения электромагнитных колебаний определенного типа задает в пространстве вертикальную плоскость посадочного курса и эта плоскость совмещается с осью ВПП.
КРМ путем излучения электромагнитных колебаний определенного типа задает в пространстве вертикальную плоскость посадочного курса и эта плоскость совмещается с осью ВПП.
КРМ представляет собой наземное радиотехническое устройство, излучающее в пространство радиосигнал, содержащий информацию для управления ВС относительно посадочного курса при выполнении захода на посадку до ВПР.
Антенна КРМ устанавливается на продолжении осевой линии ВПП, боковое смещение антенны КРМ от осевой линии ВПП не допускается.
ГРМ задает плоскость планирования, наклонную к горизонту.
ГРМ наземное радиотехническое устройство, излучающее в пространство радиосигналы, содержащий информацию для управления ВС в вертикальной плоскости относительно установленного угла наклона линии глиссады при выполнении захода на посадку до высоты принятия решения. Антенна ГРМ устанавливается от порога ВПП, т.о., чтобы обеспечивалась требуемая высота опорной точки.
МРМ обозначают моменты пролета характерных точек на этапе захода на посадку. БМРМ располагается таким образом, чтобы в условиях плохой видимости обеспечивать экипаж ВС информацией о близости начала использования визуальных средств захода на посадку. ДМРМ располагается т.о., чтобы обеспечивать экипажам ВС возможность проверки высоты полета, удаления от ВПП, функционирования оборудования на конечном этапе захода на посадку.
На борту воздушного судна сигналы курсового радиомаяка, излучаемые на частоте f КРМ принимаются курсовым радиоприемником, преобразуются и на его выходе выделяется электрический сигнал постоянного тока D К, величина которого пропорциональна угловому смещению воздушного судна от плоскости посадочного курса, а полярность определяется стороной отклонения. Сигнал D К подается на вертикальную планку нуль-индикатора и в систему автоматического управления воздушного судна (САУ ВС).
Сигналы глиссадного маяка, излучаемые на частоте f ГРМ, принимаются глиссадным радиоприемником. На его выходе выделяется сигнал постоянного тока D Г, величина и полярность которого характеризуют отклонение воздушного судна от плоскости планирования. Этот сигнал поступает на горизонтальную планку прибора посадки и в систему автоматического управления ВС.
Измеренные каналы курса и глиссады идентичны по принципу действия. Отличие каналов только в ориентации диаграммы направленности.
В случае, когда ВС находится точно на глиссаде, т.е. в точках пересечения плоскости курса и плоскости планирования, планки (стрелки нуль-индикаторного прибора) располагаются в центре шкалы, а сигналы рассогласования D К и D Г, поступающие в систему автоматического управления, равны нулю. Этот факт служит критерием экипажу для пилотирования ВС по глиссаде, задаваемой курсовым и глиссадными маяками. Все три типа маяков системы посадки работают на своих, независимых друг от друга несущих частотах.
Маркерные радиомаяки работают на своей частоте f МРМ. Сигналы этих маяков принимаются на бору маркерным радиоприемником. В момент пролета воздушным судном над маркерным радиомаяком сигнал на выходе маркерного радиоприемника вызывает звуковую и световую сигнализацию.
Структурная схема КРМ и ГРМ

Колебания ВЧ, формируемые ГВЧ, подвергаются амплитудной модуляции колебаний НЧ (90 и 150 Гц) и подводятся к антеннам А1 и А2, формируя поля излучения, энергия которых распределяется в пространстве в соответствии с зависимостью диаграмм направленности  и
и  . Линия пересечения диаграмм направленности представляет собой равносигнальное направление (рис. ДМ выше), с помощью которого задается линия планирования. Прием сигналов КРМ и ГРМ осуществляется на борту ВС радиоприемным устройством супердетеративного типа (рис. ниже).
. Линия пересечения диаграмм направленности представляет собой равносигнальное направление (рис. ДМ выше), с помощью которого задается линия планирования. Прием сигналов КРМ и ГРМ осуществляется на борту ВС радиоприемным устройством супердетеративного типа (рис. ниже).
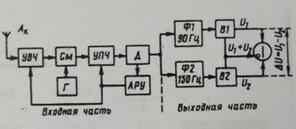
На выходе приемника с помощью фильтров Ф1 и Ф2 выделяются низкочастотные колебания (90 и 150 Гц), эти колебания проходят через выпрямители В1 и В2 и через схему вычитания подводятся к указателям к одной из планок. Сигнал на выходе вычитания пропорционален РГМ, и его полярность указывает сторону отклонения ВС от глиссады. Выходные сигналы приемника после выпрямления подводятся к сумматору, выход. сигнал который управляет работой сигнализации. К радиомаякам более высоких категорий (2,3), у которых требования к стабильности точности задаваемых траекторий. Значит, принцип работы КРМ и ГРМ несколько отличается от рассмотренного выше, и получил название метода угломерных измерений с «опорным нулем» (суммарно-разностный метод). Однако следует отметить, что формируемое в таких маяках поле излучения имеет структуру аналогичную полю равносигнальных маяков, и не требует изменения бортового оборудования.
Достоинство РМСП МВ: обеспечивает возможность точной посадки и днем, и ночью, в том числе в плохих метеоусловиях
Недостатки РМСП МВ:
§ большое влияние отраженных сигналов в метровом диапазоне и как следствие возникновение искажений при наведении ЛА
§ диаграмма направленности маяков позволяет осуществлять заход на посадку только с одного фиксированного направления
§ малый угловой размер зоны действия радиомаяка не позволяет строить удобные схемы захода на посадку
§ высокая стоимость из-за сложной антенной системы
§ повышенные требования к окружающему рельефу
§ ограниченное число каналов (около 40), т.е. работающие на одной частоте маяки создают друг другу помехи
§ при высокой плотности аэродрома, выбор свободных частот бывает проблемным
Для преодоления указанных ограничений была разработана РМСП СМВ (MLS).
Недостатки РМСП МВ:
§ большое влияние отраженных сигналов в метровом диапазоне и как следствие возникновение искажений при наведении ЛА
§ диаграмма направленности маяков позволяет осуществлять заход на посадку только с одного фиксированного направления
§ малый угловой размер зоны действия радиомаяка не позволяет строить удобные схемы захода на посадку
§ высокая стоимость из-за сложной антенной системы
§ повышенные требования к окружающему рельефу
§ ограниченное число каналов (около 40), т.е. работающие на одной частоте маяки создают друг другу помехи
§ при высокой плотности аэродрома, выбор свободных частот бывает проблемным
Принцип функционирования:
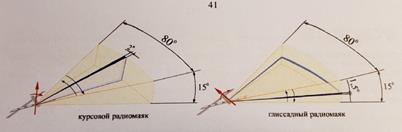
Принцип действия КРМ и ГРМ одинаков. Они реализуют временной метод измерения угловых координат без задания начала отсчета. Диаграммы направленности маяков имеют веерообразную (ножевидную) форму.
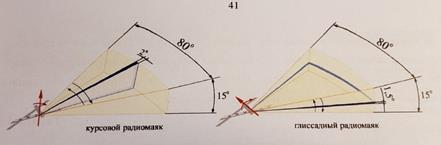
Диаграмма направленности антенны кусрового радиомаяка в горизонтальной плоскости имеет ширину 1…2  , в вертикальной 15 °. ДНА совершает вращательные движения вокруг вертикальной оси вначале по часовой, а затем против часовой стрелки в пределах 40 °. Ось симметрии антенны ГРМ ориентирована под некоторым углом к горизонту, и этот угол изменяется по тому же закону, что и азимутальный угол КРМ. Функционирование КРМ и ГРМ разнесенно по времени, то етсь в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все радиомаяки и аппаратура передачи данных работают на одной и той же несущей частоте.
, в вертикальной 15 °. ДНА совершает вращательные движения вокруг вертикальной оси вначале по часовой, а затем против часовой стрелки в пределах 40 °. Ось симметрии антенны ГРМ ориентирована под некоторым углом к горизонту, и этот угол изменяется по тому же закону, что и азимутальный угол КРМ. Функционирование КРМ и ГРМ разнесенно по времени, то етсь в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все радиомаяки и аппаратура передачи данных работают на одной и той же несущей частоте.
На ВС также осуществляется временное разделение каналов. В курсовом и глиссадном каналах формируется по два импульса, временной интервал между которыми пропорционален азимутальному углу и углу места, в частности А = 0,5Ω*( ). Измерение длительности временного интервала на борту осуществляется путем заполнения его так называемыми счетными импульсами, период следования которых известен, и подсчетам числа этих импульсов цифровым счетчиком.
). Измерение длительности временного интервала на борту осуществляется путем заполнения его так называемыми счетными импульсами, период следования которых известен, и подсчетам числа этих импульсов цифровым счетчиком.
С помощью радиомаячной системы посадки осуществляется автоматическая передача на ВМ информации об аэродроме, его категории, метеоусловиях, а также данные технического характера, необходимые для точного выполнения захода на посадку. Указанные функции выполняет подсистема автоматической передачи данных.
Принцип функционирования:
Принцип действия КРМ и ГРМ одинаков. Они реализуют временной метод измерения угловых координат без задания начала отсчета. Диаграммы направленности маяков имеют веерообразную (ножевидную) форму.
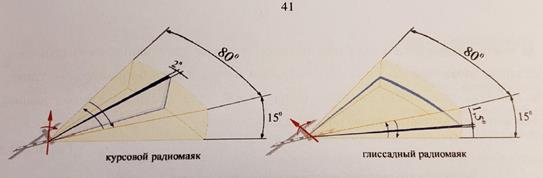
Диаграмма направленности антенны кусрового радиомаяка в горизонтальной плоскости имеет ширину 1…2  , в вертикальной 15 °. ДНА совершает вращательные движения вокруг вертикальной оси вначале по часовой, а затем против часовой стрелки в пределах 40 °. Ось симметрии антенны ГРМ ориентирована под некоторым углом к горизонту, и этот угол изменяется по тому же закону, что и азимутальный угол КРМ. Функционирование КРМ и ГРМ разнесенно по времени, то етсь в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все радиомаяки и аппаратура передачи данных работают на одной и той же несущей частоте.
, в вертикальной 15 °. ДНА совершает вращательные движения вокруг вертикальной оси вначале по часовой, а затем против часовой стрелки в пределах 40 °. Ось симметрии антенны ГРМ ориентирована под некоторым углом к горизонту, и этот угол изменяется по тому же закону, что и азимутальный угол КРМ. Функционирование КРМ и ГРМ разнесенно по времени, то етсь в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все радиомаяки и аппаратура передачи данных работают на одной и той же несущей частоте.
На ВС также осуществляется временное разделение каналов. В курсовом и глиссадном каналах формируется по два импульса, временной интервал между которыми пропорционален азимутальному углу и углу места, в частности А = 0,5Ω*(). Измерение длительности временного интервала на борту осуществляется путем заполнения его так называемыми счетными импульсами, период следования которых известен, и подсчетам числа этих импульсов цифровым счетчиком.
С помощью радиомаячной системы посадки осуществляется автоматическая передача на ВМ информации об аэродроме, его категории, метеоусловиях, а также данные технического характера, необходимые для точного выполнения захода на посадку. Указанные функции выполняет подсистема автоматической передачи данных.
Структурная схема АРП
 Структурная схема АРП в простейшем варианте содержит два приемноусилительных канала, каждый из которых состоит из антенны А(сю) или А(зв) приемного устройства ПРМ и соответствующей отклоняющей системы электронно-лучевого индикатора на электронно-лучевой трубке ЭЛТ.
Структурная схема АРП в простейшем варианте содержит два приемноусилительных канала, каждый из которых состоит из антенны А(сю) или А(зв) приемного устройства ПРМ и соответствующей отклоняющей системы электронно-лучевого индикатора на электронно-лучевой трубке ЭЛТ.
Принцип работы
Антенная система АРП (рис. 44) состоит из дух антенн:- неподвижной центральной А Ц и боковой А Б, вращающейся по окружности радиуса R c постоянной угловой скоростью Ω. Ее положение относительно меридиана места АРП характеризуется углом θ = Ω∙t, где t – текущее время.
Структурная схема АРП
 Сигналы, принятые АЦ и АБ, подаются на входы приемников ПРМ1 и ПРМ2, имеющих одинаковые фазовые характеристики, и после усиления поступают на фазовый детектор (ФД). На выходе ФД выделяется напряжение низкой частоты Ω, равной угловой скорости вращения антенны, фаза которого φr (см.3) зависит от пеленга радиостанции α. Это напряжение подводится к измерителю фазы ФИ, куда одновременно подается опорное напряжение той же частоты Ω от ГОН. Начальная фаза колебаний, вырабатываемых ГОН, совпадает с моментом прохождения АБ северного направления, а измерение разности фаз обоих напряжений позволяет определить пеленг радиостанции.
Сигналы, принятые АЦ и АБ, подаются на входы приемников ПРМ1 и ПРМ2, имеющих одинаковые фазовые характеристики, и после усиления поступают на фазовый детектор (ФД). На выходе ФД выделяется напряжение низкой частоты Ω, равной угловой скорости вращения антенны, фаза которого φr (см.3) зависит от пеленга радиостанции α. Это напряжение подводится к измерителю фазы ФИ, куда одновременно подается опорное напряжение той же частоты Ω от ГОН. Начальная фаза колебаний, вырабатываемых ГОН, совпадает с моментом прохождения АБ северного направления, а измерение разности фаз обоих напряжений позволяет определить пеленг радиостанции.
Механическое вращение АБ вызывает большие трудности, так как радиус вращения должен быть большим, а скорость вращения высокой. По этой причине вращение одной антенны заменяют последовательным переключением большого числа антенн, расположенных по окружности радиуса R (рис. 46) на расстоянии d ≤ λ/2 друг от друга. Это переключение обеспечивает специальный коммутатор механического или электронного типа.
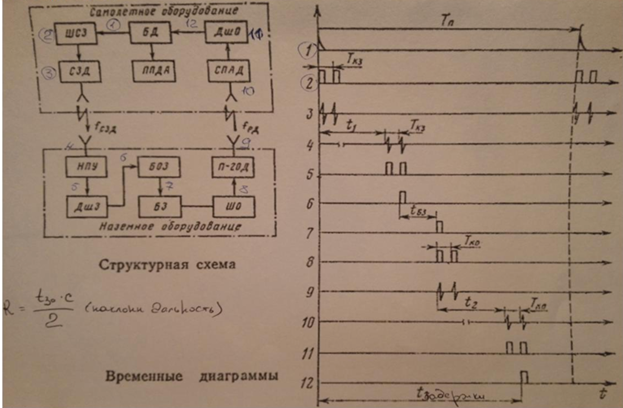
В состав РСБН входит:
1. Наземное оборудование
a. Всенаправленный радиомаяк (ВРМ)
b. Ретранслятор дальномера (РД)
c. Выносной индикатор кругового обзора (ВИКО) с пультом дистанционного управления, устанавливаемом на КДП (контрольно-диспетчерский пункт)
d. Аппаратура контрольного выносного пульта (КВП)
e. Радиостанция для связи с самолетами
f. Иногда может устанавливаться посадочное оборудование *(КРМ ГРМ)
2. Бортовое оборудование
a. Самолетный запросчик дальности (СЗД)
b. Самолетный приемник азимута и дальности (СПАД)
c. Блок измерения дальности (БД)
d. Блок измерения азимута (БИА)
e. Пульты управления и индикаторные приборы
f. Блоки связи с системами самолета
Доствоинства РСБН:
1) высокая точность (особенно определения азимута-точнее VOR)
2) возможность доукомплектования системы для превращения ее в систему наблюдения (создание индикаторного канала)
3) возможность выполнять полет по кусочно-линейной траектории, не проходящей через маяк РСБН (режим «СРП»-счетно-решающий прибор)
*режим «Азимут»-полет на/от радиомаяка; режим «Орбита»-полет по кругу определенного радиуса, обход маяка.
Недостаток: большая масса и большие габариты бортового оборудования (70-80 кг блок) Причина отказа от РСБН: для унификации оборудования (перешли на VOR, DME)
В системе РСБН выделяют 3 функциональных канала – дальномерный, азимутальный и индикаторный.
Дальномерный канал:
Измерение дальности на борту осуществляется импульсным методом, путем запроса от борта ВС и получения запросных сигналов наземным ретранслятором дальности, для обеспечения надежности запрос с ВС и ответ с земли осуществляются двухимпульсными кодированными посылками.
В БД вырабатывается импульс запроса, который шифруется в ШСЗ (шифратор сигнала запроса) и в СЗД (самолетный запросчик дальности) заполняется радиочастотой fсзд, после чего через антенну излучается в пространство.
Данный сигнал принимается наземным принимающим устройством (НПУ), затем дешифруется в ДШЗ, в БОЗ происходит обработка запросного сигнала, после чего на БЗ (блок задержки) формируется импульс ответа, шифрующийся в ШО (шифратор сигнала ответа) и заполняющийся частотой fрд в ретрансляторе дальномера. Через передающую антенну сигнал излучается в пространство.
СПАД принимает ответный сигнал, который дешифруется в ДШО, после чего поступает в блок измерения дальности. В БД измеряется время задержки сигнала tз. Дальность R вычисляется по формуле (см рисунок)
 Азимутальный канал:
Азимутальный канал:
Азимутальная антенна формирует в горизонтальной плоскости двухлепестковую ДН, которая вращается с постоянной скоростью 100 об/мин.
Измерение азимута ВС сводится к измерению временного интервала между моментом, когда ось симметрии ДН азимутальной антенны
|
| Поделиться: |



