Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристики внешних факторов на высоких широтах, влияющих на качество функционирования снс.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
В высоких широтах экипажи ВС используют GPS и ГЛОНАСС. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений [34,37], в глобальной рабочей зоне в составе современных СНС типа ГЛОНАСС и GPS функционируют три основные системы: — система космических аппаратов, состоящая из навигационных искусственных спутников Земли (сеть навигационных спутников или космический сегмент); — система контроля и управления (наземный командно-измерительный комплекс или сегмент управления); — аппаратура потребителей. Основной операцией, выполняемой в СНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т.е. пространственно-временных координат. Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СНС выбран позиционный способ определения местонахождения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных спутников земли с известными координатами[37].. Из-за малого наклонения спутниковой группировки (55°) GPS, в высоких широтах имеют малую точность по сравнению со спутниковой группировкой ГЛОНАСС (63°). Координаты потребителя в системе определяются посредством их расчета по псевдодальностям (ПД) до НКА (навигационный космический аппарат). Псевдодальность рассчитывается по временным задержкам
где
Выражение для псевдодальности относительно i-го спутника можно записать в виде[34]:
где
Помехи радиоприему создаются как естественным путем, так и искусственным источникам. К естественным источникам помехам в высоких широтах относятся полярные сияния, внеземные источники помех и др. Искусственными источниками являются радиотехнические средства, такие как радиовещательные, радионавигационные и связные средства. Проанализируем каждую из выше указанных погрешностей, методы их коррекции и особенности эксплуатации СНС на высоких широтах. 1) Ошибки вычисления орбит
Рисунок 2.9 Суточные значения СКП всех пригодных НКА к использованию, R – радиальна погрешность, N – нормальная, B- трансверсальная. Таблица 2.3
Определенные выше эфемеридные погрешности принято пересчитывать в эквивалентную ошибку определения псевдодальности Общая формула для пересчёта эфемеридных погрешностей в погрешность определения псевдодальности имеет вид:
где коэффициенты k определяют вклад соответствующих ошибок в итоговую ошибку и зависят от взаимного положения НКА и потребителя. Были расcчитаны [39] усредненные (по различным угловым положениям НКА и потребителя) значения этих коэффициентов: Используя таблицу 2.2 получаем приведенную к псевдодальности погрешность, обусловленную эфемеридными погрешностями равную 0,5 м. 2) Частотно-временная погрешность – К дальномерным погрешностям частотно-временной области можно отнести и погрешности, вносимые групповой задержкой навигационного сигнала в аппаратуре спутника. Групповая задержка представляет собой интервал времени между выходным навигационным сигналом в фазовом центре передающей антенны и выходным сигналом бортового эталона частоты и времени. Систематическая составляющая групповой задержки измеряется при сборке и калибровке аппаратуры спутника, она индивидуальна для каждого НКА и передается в составе его служебного сообщения. Случайная составляющая рассматривается в составе дальномерной погрешности и обычно не превышает 3 нс. Степень достоверности частотно-временных поправок зависит от их «возраста», т. е. от срока, прошедшего с момента загрузки в память бортового вычислителя. В ситуации, когда происходит затенение спутника, коррекция эфемерид спутника длительное время невозможна. Для уменьшения зависимости от интервала между обновлениями данных применяется режим межспутниковых измерений, реализованный в GPS на спутниках типа BlockIIR и подлежащий реализации в ГЛОНАСС на спутниках типа ГЛОНАСС-М.
Рисунок 2.10 Суточные значения СКП поправок часов пригодных к использованию НКА. 3) 4) Рассеивание в атомосфере. состоит из рассеивания радиоволн при прохождении трапосферы и атмосферы Рассеивание в ионосфере для частотных диапазонов СНС Основная проблема при компенсации ионосферной задержки состоит в том, что значение задержки очень широко меняется в зависимости от региона, в котором расположен приёмоиндикатор, времени суток и года, солнечной и геомагнитной активности. В полярной ионосфере существенное влияние оказывают неоднородности, сформированные выпадением протонов и электронов с полярного каспа при магнитных и ионосферных бурях, авроральные и субавроральные неоднородности, при этом частота появления этих неоднородностей приходиться на зимний период. Для получения определенных закономерностей в указанных зонах за период международного геофизического года (МГГ) в работе[16] были проанализированы данные ионосферных станций, координаты которых приведены в табл. 2.4 Таблица 2.4
Так как в летнее полугодие Солнце в высоких широтах не опускается за горизонт, в отличие от умеренных широт, ионосферные станции круглосуточно фиксируют слои E, Fi и P2, причем изменение критических частот в основном характеризуется теми же закономерностями, что и в средних широтах. Различие состоит в том, что амплитуда суточных и сезонных изменений заметно меньше и убывает по мере увеличения широты. В этот период лучистая энергия Солнца оказывается определяющей в ионизации Земной атмосферы. В остальные времена года вклад корпускулярной ионизации Земной атмосферы становиться особенно заметным. Сигналы спутниковых радионавигационных систем, передаваемые в частотном диапазоне 1000-1600 МГц, могут испытывать аномальное рассеяние в высокоширотной ионосфере в области высот 200-500 км[39]. Процесс рассеяния обусловлен эффективным взаимодействиям радиоволн с интенсивными ионно-звуковыми колебаниями, которые генерируются в области неизометричности плазмы, возникающей из-за наличия продольных стационарных электрических токов и нагрева плазмы в системе «ионосфера-плазмосфера» за счет диссипации энергии кольцевого тока. Последствиями данного процесса могут быть уменьшение интенсивности полезного сигнала и неопределенность положения источника сигнала для приемника. Изучая данные полученные в ходе исследований [16], можно сделать выводы, что в диапазоне высот 200-500 км в высокоширотной ионосфере имеется область ионно-звуковой турбулентности, в которой могут испытывать аномальное рассеяние сигналы спутниковых радионавигационных систем, передаваемые в частотном диапазоне 1000-1600 МГц. При этом происходит увеличение погрешности определения псевдодальности, обусловленное тем, что каждая точка зоны ионно-звуковой турбулентности может, за счет рассеяния исходного сигнала, излучать сигнал, подобный спутниковому сигналу СНС. Более того, при рассеивании излучаемого навигационным спутником сигнала на ионно-звуковой турбулентности происходит изменение направления волнового вектора на большие углы, что может привести к полной потере приемником сигнала СНС, то есть к нарушению функционирование системы спутниковой навигации. Рассмотрение особенности зоны высоких широт приводит к выводу, что источниками ионизации ионосферы для этой области является как лучистое, так и корпускулярное излучение Солнца, причем вклад каждой составляющей в зависимости от широты, времени суток, времени года различен. Канал передачи дифференциальных поправок подвержен воздействию сразу нескольких типов различных факторов, что в конечном итоге приводит к понижению его надежности в высоких широтах.
5) Тропосферная составляющая погрешности измерений обусловлена наличием трапосферной рефракции. Задержка сигнала в тропопсфере может достигать от 8 до 80 нс, что соответствует погрешности измерения псевдодальности от 2,4 до 24 м. Значение тропосферной погрешности зависит от метеоданных (атмосферное давление, температура и влажность воздуха, а также угла места НКА (угло возвышения над горизонтом) Тропосферная составляющая погрешности измерения псевдодальности состоит из двух компонент. Первая определяется влиянием сухой атмосферы, вторая зависит от содержания водяных паров а атмосфере[37]: Т=Тd+Tw, (2.32) Td-погрешность за счет влияния сухой атмосферы; Tw- погрешность за счет наличия водяного пара в атмосфере. Модель трапосферы Саатсмоинена представляет собой следующую зависимость: T= где Т – задержка сигнала в тропосфере, м; z – зенитный угол, град; p - атмосферное давление, мб; t – температура, К; e – парцианальное давление, мб. Учитывая, что Арктическая зона это область низких температур и высокого давления[40], погрешность распространения радиоволн через трапосферу, будет выше, чем в средних широтах Земли. 6) Среднеорбитальная СНС ГЛОНАСС – одна из немногих технических систем, на характеристики которой оказывают заметное влияние законы обшей и специальной теории относительности Эйнштейна. Связано это с тем, что, во-первых, НКА движутся по орбитам с достаточно высокими скоростями; во-вторых, разность гравитационных потенциалов в точках нахождения НКА и потребителя такова, что ею нельзя пренебречь; в-третьих, Земля с находящимися на ней потребителями вращается относительно инерциальной системы координат, в которой задается движение НКА. Остановимся кратко на отмеченных факторах, следуя [41]. Более подробное описание релятивистских эффектов можно найти в [42]. 7) Погрешность аппаратуры потребителя. Следующим по порядку прохождения сигнала источником дальномерных погрешностей считается схема приемоиндикатора. Основным источником погрешностей являются схемы слежения за задержкой огибающей и несущей сигнала. Принято различать шумовые и динамические погрешности. Огибающей сигнала НКА являются двоичные параметры системы передач (ПСП). Шумовая погрешность некогерентной схемы слежения за задержкой ПСП имеет СКО [37], представленное следующей формулой: σ= где τ S – длительность элементарного символа ПСП; Bt – односторонняя ширина полосы пропускания схемы слежения за задержкой; Br – односторонняя ширина полосы пропускания тракта промежуточной частоты; P/N 0 – отношение мощности сигнала к спектральной плотности шума на входе приемника. При этом диапазон погрешностей оценивания псевдодальности составляет 0,5...30 м, а псевдоскорости – 0,1...10 м/с. Данные погрешности обусловлены внутренним шумом приемника и динамикой движения потребителя. Кроме данных источников погрешностей, в приемнике есть еще один источник погрешностей оценивания псевдодальности и псевдоскорости – опорный генератор. При этом на характеристики следящих систем приемника оказывает влияние кратковременная нестабильность частоты. Нестабильность частоты опорного генератора (ОГ) приводит к нестабильности шкалы времени приемника и флуктуациям фазы ОГ. Геометрический фактор. Так же на точность определения пространственно-временных координат потребителя оказывает влияние взаимное расположение навигационных спутника и потребителя. Следовательно, возникает задача выбора оптимального рабочего созвездия спутников, при котором будет обеспечиваться заданная точность измерений. Существует такое понятие, как коэффициент геометрии Коэффициент геометрии численно определяется для случая, когда погрешности определения псевдодальностей до четырех спутников равновелики и не коррелированны. В общем случае его можно представить выражением
Выражение может быть записано в другом виде:
где В свою очередь, пространственный коэффициент может быть разбит на составляющие, характеризующие точность определения координат потребителя в горизонтальной и вертикальной плоскостях:
где
Геометрические соотношения, характеризующиеся положением спутников относительно друг друга, могут влиять на наличие погрешности спутниковых измерений. Эти данные можно использовать для оценки точности определения координат местоположения потребителя в горизонтальной (режим двумерных измерений или 2-D) и вертикальной плоскостях, в трехмерном пространстве (режим трехмерных измерений или 3-D) и т. д. Так, используя потенциальное значение суммарной погрешности определения псевдодальности, приведенной в табл. 1.4, можно рассчитать потенциальную погрешность определения пространственного положения (сферическая ошибка) потребителя, например, для четырех НС: σcфер = К GPσдал = 15,2 м. Аналогичные ошибки получают при определении координат потребителя в горизонтальной плоскости и по высоте: σгор.пот = КGH σдал = 8,7 м, σвер.пот = КGV σдал = 12,4 м Суть в том, что в зависимости от взаимного расположения спутников на небосовде геометрические соотношения, которыми характеризуются это расположение, могут многократно увеличивать или уменьшать все неопределнности. Геометрический фактор снижения точности является индикатором надежности представления точности позиционирования. В случае, кода спутники расположены на небесной сфере достаточно широко (сильная геометрия), искомое положение может находиться в пределах заштрихованной области, и границы возможной ошибки малы. Иными словами, чем больше угол между направлениями на спутники, тем точнее местоопределение. В таблице 2.5 указаны значение DOP и их характеристики точности. Таблица 2.5
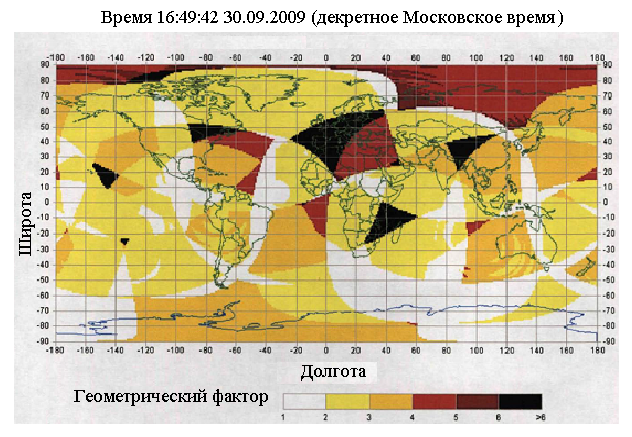
Согластно исследованию [15], в котором получены значения были полченны GDOP (Рисунки 2.10,2.11,2.12) Когда в области видимости находятся слишком близко друг к другу («слабая» геометрия), размер заштрихованной увеличивается, что увеличивает неопределенность положения.
Рис 2.10. Значения позиционного геометрического фактора 30 сентября 2009 года в 16:49 по декретному Московскому времени
Рис. 2.11 Значения позиционного геометрического фактора 8 декабря 2009 года в 16:09 по декретному Московскому времени
Рис. 2.12 Значения позиционного геометрического фактора 16 декабря 2009 года в 18:06. В различные промежутки времени (Рис. 2.10 и Рис.2.11 Рис 2.12)., видно, что значение геометрического фактора, при неполной группировки ГЛОНАСС – 21 НКА, периодически появляются мертвые зоны ≥6(темная область), что способствует ухудшению навигационной обстановки, определения от ГЛАНАСС отсутствуют, а также ухудшается точность определения навигационных параметров.. Рассмотрим точностные характеристики при использовании сигналов СНС ГЛОНАСС с неполной группировкой НКА по состоянию на 06 ноября 2008 года (группировка СРНС ГЛОНАСС составляла 21 НКА). В табл.8 приведены рассчитанные средние вероятности (P) наблюдения заданного числа НКА (≥4) при использовании неполной группировки ГЛОНАСС и соответствующие геометрические факторы снижение точности по местополодению (PDOP), снижение точности в горизонтальной плоскости (HDOP), снижение точности в вертикальной плоскости (VDOP). Таблица 2.6 Характеристики наблюдаемости НКА ГЛОНАСС
Вероятностные характеристики наблюдаемости НКА СНС ГЛОНАСС соответствуют тому, что средняя вероятность нахождения в поле видимости P не менее 6 НКА ГЛОНАСС составляет примерно 0.87, а 9 и более НКА – 0.47. Для проведения исследования на радиовидимость НКА СНС использовался реальный альманах системы ГЛОНАСС от 6 ноября 2008 года и геодезические координаты г. Норильск: 62°20’00” с.ш., 88°13’00” в.д. В ходе эксперимента в течение суток с шагом в минуту вычислялись координаты НКА, находящихся в зоне радиовидимости над г. Норильск рисунок 2.13, и углы места НКА относительно геодезических координат г. Норильск. полученные в результате эксперимента данные о количестве доступных НКА отображены на рис.2.14 Рис. 2.13 Радиовидимость НКА ГЛОНАСС над г. Норильск (06.11.2008 г.) Проанализировав данные, приведенные на рис. 2.13, можно сделать вывод, что в период времени от 03:35 до 04:25 навигационные определения (НО) с использованием АП СНС невозможны, вследствие отсутствия доступности минимально необходимого для НО в трехмерном пространстве (4-х) НКА. Также следует отметить, что в течение суток наблюдается группа радиовидимых НКА СНС с максимальным углом места близким к 30°, что при совершении ВС маневров в аэродромной зоне может приводить к затенению сигналов некоторых из них. Так как допускаемый крен ВС при совершении маневров составляет не более 30°, проведем исследование на радиовидимость НКА СНС, углы места которых превышают 10°, 20° и 30°. Рис. 2.14 Радиовидимость НКА ГЛОНАСС над г. Норильск (06.11.2008 г.) при маневрировании ВС Полученные в результате обработки экспериментальные данные представлены на рис.2.14 и отображают значительное понижение показателей доступности НКА СНС уже при 10° угла места, что будет приводить к потере слежения за навигационным сигналом (НС) при совершении ВС маневров. Далее производилась коррекция измеренных псевдодальностей, с использованием известных моделей ионосферных и тропосферных погрешностей, а также погрешности, вызванной релятивистским эффектом. После этого на основе скорректированных ПД и рассчитанных координат НКА с помощью итеративного метода взвешенных наименьших квадратов производился расчет навигационных параметров СНС. Полученные значения геометрических факторов (PDOP, HDOP, VDOP) для указанных выше условий местоопределения в районе г. Норильск отображены на рис. 2.15
Рис. 2.15 Геометрические факторы (PDOP, HDOP, VDOP) Согласно полученным данным можно сделать вывод, что в период времени от 03:35 до 04:25 по декретному Московскому времени над г. Норильск навигационная система является неудовлетворительной? вследствие отсутствия минимально необходимого для полноценных НО числа НКА (4-х), а также превышения допустимых показателей ГФ для НО (отображен жирной линией на графике). В табл. 2.3 приведены рассчитанные аналогичным образом усредненные по времени среднеквадратические отклонения определения координат (drms) и точности определения высоты (2СКО) в стандартном и дифференциальном режимах.
Таблица 2.7Точности определения координат и высоты по НС от НКА СРНС ГЛОНАСС
Из табл. 2.3 следует, что использование АП СРНС в дифференциальном режиме при группировке НКА СРНС по состоянию на 06 ноября 2008 года приводит к повышению точности лишь на 5…10% по координатам и на 7% по высоте, а для полной группировки НКА СРНС повышение точности по координатам и высоте составляет 13…15% и 20%, соответственно. Предполагалось, что СКО измерения псевдодальностей ГЛОНАСС в стандартном режиме составляет 30 м, а в дифференциальном 5м. Подводя итог анализу погрешностей определения псевдодальности и псевдоскорости, выявим, что ионосферная и тропосферная погрешность имеет систематическую и случайную составляющие (математическое ожидание и сигма). Математическое ожидание нельзя игнорировать, и оно не суммируется, как дисперсии. Поэтому дисперсия обшей ошибки определяется как сумма дисперсий отдельных составляющих.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 783; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.50.71 (0.011 с.) |

 сигнала по трассе «i-й НКА – потребитель» и известной скорости распространения радиоволн – с:
сигнала по трассе «i-й НКА – потребитель» и известной скорости распространения радиоволн – с: (2.27)
(2.27)
 (2.28)
(2.28) - значение времени на бортовой шкале в момент излучения некоторой фазы дальномерного кода со спутника
- значение времени на бортовой шкале в момент излучения некоторой фазы дальномерного кода со спутника - значение времени на шкале потребителя в момент приёма той же фазы дальномерного кода у потребителя.
- значение времени на шкале потребителя в момент приёма той же фазы дальномерного кода у потребителя. (2.29)
(2.29)


 тоговая погрешность определения псевдодальности
тоговая погрешность определения псевдодальности  определяется как сумма частных составляющих погрешностей и может быть представлена в виде[34]:
определяется как сумма частных составляющих погрешностей и может быть представлена в виде[34]: (2.30)
(2.30) - погрешность Эфимиридной информации
- погрешность Эфимиридной информации - частотно временные поправки
- частотно временные поправки - погрешность многолучового распространения
- погрешность многолучового распространения -погрешность распространения радиоволн в трапосфере
-погрешность распространения радиоволн в трапосфере - погрешность распространения радиоволн в ионосфере
- погрешность распространения радиоволн в ионосфере
 погрешности релявитских и гравитационных эффектов.
погрешности релявитских и гравитационных эффектов. появляются в следствии неточностей прогноза и расчёта эфемерид спутников, выполняемых в аппаратуре приёмника. При проведении эксперементальных исследований под эфемеридными погрешностями подразумевают следующие погрешности: - трансверсальная (по касательной к траектории); - радиальная; - нормальная (по нормали к плоскости, образуемой векторами). Итоговые результаты исследований Информационного аналитического центра ЦНИИМАШ [40] эфемеридных погрешностей для НКА GPS приведены на рисунке, максимальные значения за время наблюдения занесены в таблицу 2.3.
появляются в следствии неточностей прогноза и расчёта эфемерид спутников, выполняемых в аппаратуре приёмника. При проведении эксперементальных исследований под эфемеридными погрешностями подразумевают следующие погрешности: - трансверсальная (по касательной к траектории); - радиальная; - нормальная (по нормали к плоскости, образуемой векторами). Итоговые результаты исследований Информационного аналитического центра ЦНИИМАШ [40] эфемеридных погрешностей для НКА GPS приведены на рисунке, максимальные значения за время наблюдения занесены в таблицу 2.3.
 (2.31)
(2.31)

 при работе приёмника в условиях, отличных от «свободного пространства», на его вход, кроме сигналов НКА, могут поступать переотраженные от местных предметов (а также от подстилающей поверхности) сигналы. Это приводит к смещению измеряемого в приёмнике положения максимума корреляционной функции опорного сигнала с поступившей смесью входных сигналов, т. е. к возникновению погрешности в оценке времени приёма сигнала, а следовательно, и в оценке псевдодальности. В высоких широтах можно пренебречь индустриальными помехами, которые могут быть отнесены к квазиимпульсным помехам, из-за плохо развитой инфраструктуры. В высоких широтах существенное значение имеют сигналы, подобные помехам, обусловленные прохождением в точку приёма отраженного от ледовых покрытий сигнала[16].
при работе приёмника в условиях, отличных от «свободного пространства», на его вход, кроме сигналов НКА, могут поступать переотраженные от местных предметов (а также от подстилающей поверхности) сигналы. Это приводит к смещению измеряемого в приёмнике положения максимума корреляционной функции опорного сигнала с поступившей смесью входных сигналов, т. е. к возникновению погрешности в оценке времени приёма сигнала, а следовательно, и в оценке псевдодальности. В высоких широтах можно пренебречь индустриальными помехами, которые могут быть отнесены к квазиимпульсным помехам, из-за плохо развитой инфраструктуры. В высоких широтах существенное значение имеют сигналы, подобные помехам, обусловленные прохождением в точку приёма отраженного от ледовых покрытий сигнала[16].
 (2.33)
(2.33) (2.34)
(2.34) являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения навигационного спутника и потребителя (в иностранной литературе используется обозначение GDOP – в англоязычной литературе данная величина называется Geometric Dilution of Precision).[34]
являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения навигационного спутника и потребителя (в иностранной литературе используется обозначение GDOP – в англоязычной литературе данная величина называется Geometric Dilution of Precision).[34] (2.35)
(2.35) (2.36)
(2.36)
 –пространственный (PDOP - Position Dilution of Precision) коэффициент;
–пространственный (PDOP - Position Dilution of Precision) коэффициент;  – временной (TDOP – Time Dilution of Precision).
– временной (TDOP – Time Dilution of Precision). (2.36)
(2.36) – горизонтальный (HDOP Horizontal Dilution of Precision) коэффициент.
– горизонтальный (HDOP Horizontal Dilution of Precision) коэффициент. - вертикальный (VDOP Vertical Dilution of Precision) коэффициент.
- вертикальный (VDOP Vertical Dilution of Precision) коэффициент.