Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Неавтономная система управления
Анализ требований по точностным навигационным характеристикам[22] БЛА показывает, что для обеспечения специальных полётов требуется большая точность навигационных характеристик. Перспективным направлением на пути повышения точности является установка навигационного передатчиков на земле или на сопровождающем судне. НП будет представлять собой передатчик, работающий совместно с космическим сегментом, сигнал которого должен быть синхронизирован с сигналами СНС ГЛОНАСС и близок им по параметрам и формату. Использование НП позволяет реализовать дополнительное преимущество, заключающееся в повышении точности и надежности навигационных определений в местах затрудненного приёма сигналов СНС. С помощью НП можно обеспечить оптимальную геометрию излучателей и, стабильное навигационное обеспечение. С помощью НП теоретически можно обеспечить относительную навигацию даже в отсутствии сигналов от НКА, а значит непрерывность обслуживания в течении наиболее ответственных отрезков времени выполнения навигационного задания. Возможны два варианта использования навигационной системы на основе НП: - в автономном режиме (только с использованием сигналов НП), - в совместном режиме с СНС. Тогда можно выделить следующие разновидности полученной навигационной системы:
- автономные: а) синхронные, б) асинхронные,
- работающие совместно с СНС: а) синхронные, б) асинхронные.
Понятие синхронной системы означает точную синхронизацию всех НП системы и их привязку к единому времени [50]. В такой системе механизмы синхронизации могут быть весьма сложны и труднореализуемы. В асинхронной системе точной привязки к единому времени каждого НП нет. Каждый НП имеет свою несинхронную шкалу времени, относительно которой происходит формирование НС. С технической точки зрения это означает, что в системе необходимо организовать измерение невязок шкал времени НД относительно единого времени. В данной модели эта задача решается с помощью синхроспутника. Тогда помимо приёма НС от НП необходимо принимать сигнал от СС, который в составе НА передает невязку шкал времени используемых в системе на основе НП. Реализация такого псевдо-дифференциального режима требует дополнительного канала связи между АП и СС, но данный канал связи может быть организован и на частоте передачи НС от НП.
Одной из причин трудности в реализации совместного режима работы СНС и НП является сложность синхронизыции шкалы времени НП со шкалой времени СНС. Отсутствие такой синхронизации может привести к ошибкам и снизить фактическую точность СНС, но приведенная математическая модель и алгоритмы работы СНС позволяют исключить ошибки, связанные с рассинхронизацией шкал времени, благодаря использованию псевдо дифференциального режима. Результаты анализа влияния комплексной обработки сигналов НП и НКА, при решении навигационной задачи над г. Норильск, показали, что погрешность определения навигационных параметров высоты (Н) и долготы (L) не превышает 25 метров, а для широты (В) не превышает 8 метров [50] Таким образом, можно заключить, что использование в высоких широтах в зонах плохой радиовидимости НКА функционального дополнения СРНС ГЛОНАСС в виде псевдоспутников позволяет улучшить точностные и надежностные характеристики АП СНС и повысить безопасность полетов воздушных судов гражданской авиации, в том числе и в условиях затенения навигационной антенны элементами конструкции ВС при совершении маневров, за счет избыточности навигационных данных [45,46], необходимой для поддержания заданной точности. Использование НП имеет ряд недостатков: - аппаратура потребителя в этом случае может быть более сложной, например, при реализации синхронизации космического (СНС) и наземного сегментов; - требуется решить ряд проблем, связанных с применением ПС, а именно многолучевость и проблема «ближней-дальней» зоны (далее по тексту «проблема динамического диапазона» Одна из главных проблем, связанных с использованием комплексированной навигационной системы СНС c НП, - проблема динамического диапазона [52], когда более мощный сигнал возле приемника АП СНС доминирует над приемом слабых сигналов от отдаленных передатчиков (например, НКА СНС).
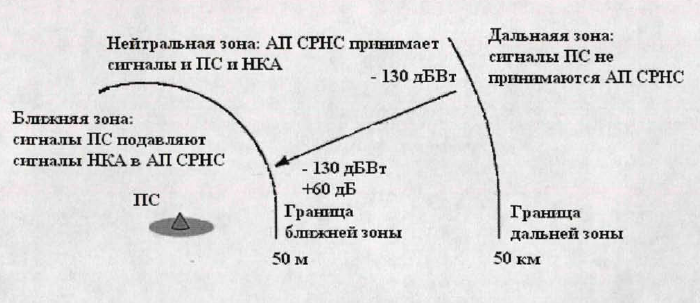
Рисунок 3.1 Проблема динамического диапазона.
Сигнал НП может достигать 60 дБ, на дистанции АП СНС относительно ПС от 50 м до 50 км. Если сигнал НП имеет тип сигнала средней точности СНС ГЛОНАСС, то пики взаимной корреляции между сигналом НКА и ПС в худшем случает достигнут 21.6 дБ. Так как 60-21.6≈38 дБ, сигнал НП мощнее, поэтому он доминирует в АП СНС на расстоянии 50 м.
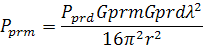
Найдем такую область в поле радиовидимости сигналов НП, в которой АП СНС может принимать сигналы НП и НКА. АП СНС для выделения сигнала требуется отношение сигнал/шум минимум 6 дБ. Выбросы взаимокорреляционной функции между сигналами НП и НКА составляют 21.6 дБ, при границе отношения сигнал/шум в приемнике равном 21.6-6=15.6 дБ. Значение 15.6 дБ соответствует отношению 6:1. Поэтому для исключения проблем между сигналами НП и НКА их следует размещать на расстоянии d и 6d. Трудность заключается в том, что на расстоянии d сигналы от НП будут блокированы. Отношение 6:1 может быть преувеличенным, на практике часто используется отношение 4:1. Рассмотрим отношения для навигационных сигналов ПС и НКА, при выборе оптимального набора М-последовательностей (псевдослучайных последовательностей, далее по тексту ПСП) для модуляции несущих сигналов системы на базе ПС, работающей в ограниченном пространстве. На вход приемного устройства будут поступать сигналы от передающих устройств, но их мощности будут зависеть от расстояния между приемным и передающим устройством. Особо остро эта проблема проявляется в ближней зоне, когда слабый сигнал подавляется более сильным сигналом, т.к. несколько передающих устройств могут находиться на различном расстоянии от приемника. Рассмотрим область функционирования системы навигации на базе ПС. В данном случае на вход приемного устройства будут поступать сигналы от ближних источников (ПС) и дальних (НКА). Мощности сигналов, поступающих на вход АП СРНС от передатчиков удаленных по отношению к АП СРНС, можно рассчитать по формулам связывающим мощности сигналов в приемной и передающей антеннах в зависимости от расстояния:
где P prd - мощность сигнала на передающей антенне, Р ргт - мощность сигнала на приемной антенне, G p rd - коэффициент усиления передающей антенны, G prm - коэффициент усиления приемной антенны, r - расстояние между передающей и приемной антенной, λ - длинна волны сигнала.
Получив конечное множество образующих полиномов нечетной и четной длинны (в нашем случае используются полиномы длин 9 и 10) можно вычислить значения взаимных корреляционных функций для ПСП. Используем стандартный метод оценки степени корреляции ξ двух последовательностей, выразив их через два ряда f и g
где j - комплексное сопряжение, i - сдвиг ПСП относительно друг друга. Диаграммы с оценкой степени корреляции д для последовательностей, сформированных полиномами длины 9 и 10, отображены на рис.3.2 а и б, соответственно.
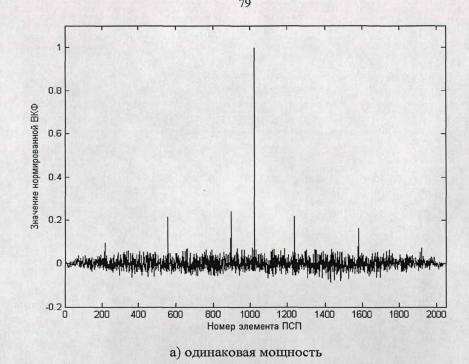
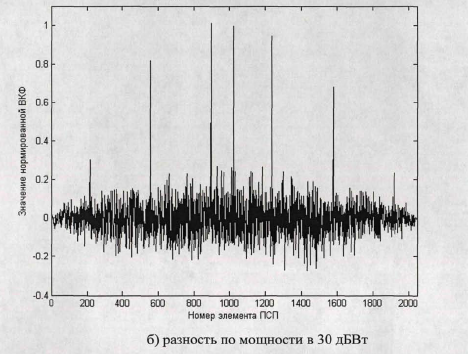
Рисунок 3.2 По полученным оценкам корреляций д множества псевдослучайных последовательностей можно сделать вывод, что взаимная корреляция последовательностей генерируемых полиномом нечетной длины, имеют более равномерную область распределения значений ≪паразитных≫ пиков. Верхний порог «паразитных» пиков взаимной корреляции последовательностей, генерируемых полиномом нечетной длины, составляет 20,15 % по отношению к корреляционному пику, а для последовательностей генерируемых полиномом четной длины составляет — 37,43 %. Рассмотрим случай, когда мощность сигнала от удаленного передатчика будет слабее ближнего сигнала по мощности на 30 дБВт. При отсутствии шумов и интерференции сигнал на выходе коррелятора [29] будет иметь вид:
где A — коэффициент усиления приемного тракта системы, Т — задержка распространения радиосигнала, Т - оценка приемником задержки распространения, Ф — случайное значение фазы сигнала. Тогда при использовании для модуляции несущей частоты сигнала [30] передатчика набора псевдослучайных последовательностей [31], генерируемых полиномом четной длины, есть возможность возникновения ситуации, когда «паразитные» пики в корреляторе приемника превысят значение основного корреляционного пика. Графики, иллюстрирующие корреляционную обработку суммы двух сигналов одинаковой мощности и отличающихся по мощности на 30 дБВт, отображены на рис.3.3 а и б, соответственно.
Рисунок 3.3 Полученные результаты позволяют сделать вывод о том, что для наилучшего разделения и приёма сигналов в канале передачи информации с использованием шумоподобных сигналов (ШПС) сигналов [27,28,32], несущую частоту сигнала лучше модулировать псевдослучайными последовательностями, которые формируются полиномами нечетной длиныили оперировать ограниченным набором последовательностей, генерируемых полиномом четной длины. В противном случае при использовании полного набора псевдослучайных последовательностей сформированных образующими полиномами четной длины существует вероятность превышения в корреляторе приемника значений ≪паразитных≫ пиков основного корреляционного пика, вследствие чего приемник не сможет демодулировать полученный сигнал [9]. Решения проблемы динамического диапазона Разные частоты. Проблема может быть решена, если передавать сигналы ПС на частотах отличных от частот СРНС (сигналы смещённые относительно частоты L1 (1598,0625... 1604,25 МГц)), но в пределах полосы частот СРНС. Это оптимальный способ, однако это потребует модификации существующей АП СРНС. Более быстрый и длинный сигнал. Альтернативные коды могут генерировать более длинные последовательности, чем существующие ПСП используемые для модуляции несущего сигнала СРНС. Корреляционные свойства кодов могут быть улучшены при использовании более длинных высокоскоростных кодов, что также потребует модернизации АП СРНС.
Импульсный метод: варьирование импульсных сигналов со случайными или заданными размерностями цикла при множественном доступе с временным разделением каналов. Комитет RTCM-104 предложил, чтобы при передаче сигнала ПС его импульсы были частыми, короткими и мощными. Несмотря на короткий цикл, большая мощность позволяет отслеживать сигнал ПС в канале связи. Интервал между импульсами, когда передатчик ПС выключен, позволяет АП СРНС отслеживать сигналы СРНС без помех. Применение ПС в гражданской авиации рассматривалось уже в 1984 году. Использование ШПС с различными ПСП может быть частью из разнообразных методов решения проблем, но более длинные ПСП не будут значительно изменять уровень взаимокорреляционных помех. Так в 1986 году некоторые пользователи RTCM предложили новую более полную структуру сигнала ПС. Все три метода, рассмотренные ранее, были внесены в список, но метод временного разделения каналов доступа был единственным рекомендуемым, потому что его использование подразумевало наименьшее воздействие на уже существующую АП СНС. Впоследствии проявились недостатки проекта TDMA относительно «небланкирующих» (негасящих) приемников, которые используются и сегодня. В 1990 году это привело к изменению проекта TDMA. Несмотря на все предложения угроза со стороны проблемы динамического диапазона осталась, потому что ограничение минимальных помех возможно только при использовании ШПС и TDMA. Модернизация АП СРНС привела к тому, что практичнее стало использование FDMA, которое оптимально решало проблему динамического диапазона. В результате была предложена более эффективная структура сигнала, который комбинирует сигналы и смещение частоты, используя mпреимущества свойств взаимной корреляции, которыми модулируются НС, и хороших импульсных диаграмм. Полностью различные полосы частот могут использоваться только при готовности к изменениям (дополнениям) в существующих приемниках. При этом обязательна модификация внешнего интерфейса (деления частот). Заданный диапазон частот должен быть разделен на заданное число полос, чтобы учитывать доплеровский сдвиг (частоты) относительно НД или НКА. Из всех перечисленных методов борьбы с проблемой динамического диапазона использование импульсного метода кажется наиболее многообещающим, так как это не потребует серьёзных изменений в навигационных приемниках АП СНС эксплуатируемой ВС ГА. С другой стороны, при разработке перспективной навигационной аппаратуры, использование преимуществ СНС ГЛОНАСС в виде частотного разделения каналов доступа позволяет ориентироваться разработчикам АП СНС на использование литер частот затененных навигационных космических аппаратов в интервале времени проведения полета ВС. Хотя использование такого способа потребует модернизации существующей АП СНС, а именно увеличение количества фильтров в рабочем диапазоне частот, это позволит полностью преодолеть проблему электромагнитной совместимости при использовании комплексированной навигационной системы СНС-НД.
Но, несмотря на это, при приеме непрерывного сигнала АП СНС должна быть готовой к преднамеренным подавляющим помехам, как и все современные приемники, даже если помеха будет иметь случайный характер. Для задач требующие более лучших показателей (проведение специальных работ) необходимо использовать комплекс навигационных оборудований НКА,НП, РВ. Предложенная модель комплексированной системы навигации на основе НКА, ПС, ДПС и РВ для проведения специальных работ с применением ВС ГА в высоких широтах позволяет оценивать точность определения навигационных параметров АП СНС в части осуществления категорированной посадки ВС и решения других задач, требующих повышенной точности навигационных определений. Измерение вертикального положения ВС радиотехническими методами может быть организовано различными способами. Самый распространенный способ измерения высоты, используемый на ВС - радиовысотомеры [23]. Измерение высоты в РВ основывается на измерении времени распространения электромагнитных волн до отражающей поверхности. В РВ используются различные диапазоны частот и виды модуляции. ICAO рекомендует применять РВ с несущей частотой сигнала равной 4,2 - 4,4 ГГц. В данном диапазоне частот работают такие отечественные радиовысотомеры как А-052, А-053 и А-078 серии. Точность определения высоты составляет Ѓ}(0,5 м + 0,01Н). Существуют высотомеры с более высокой точностью определения высоты, такие как высотомерная система для экранолетов «Волна-2К-01» с точностью Ѓ}(0,3 м + 0,03Н), работающая в том же диапазоне частот. Также в настоящее время применяются РВ более ранних моделей с рабочими частотами 444 и 2000 МГц. К ним относятся такие РВ как РВ-ЗМ и РВ-УМ. Исследования статистических, энергетических, спектрально-корреляционных и временных характеристик отраженного сигнала в совокупности с исследованием рассеивающих характеристик статистически неровной поверхности являются теоретической основой для рассмотрения точностных характеристик радиовысотомеров. Поскольку бортовые РВ используют сигнал, отраженный от протяженной статистически неровной поверхности, им свойственны специфические ошибки в измерении высоты, в ряде случаев значительно превышающие те, которые имеют место при измерении дальности до аэрокосмических объектов. При высокостабильной радиоаппаратуре ошибки РВ, связанные со случайным характером принятого сигнала и динамикой полета ВС, можно разделить на три составляющие: - ошибки, вызванные смещением средней оценки измеряемой высоты (смещение оценки), - флуктуационные ошибки, - динамические ошибки.
|
|||||||||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 397; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.132.214 (0.021 с.) |
 (3.1)
(3.1) (3.2)
(3.2) (3.3)
(3.3)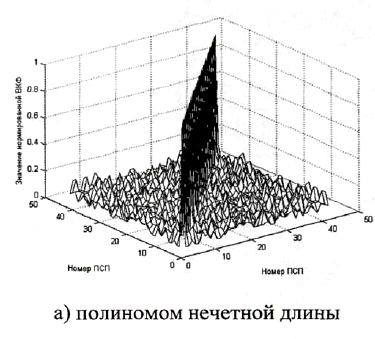
 (3.4)
(3.4)