
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нормативная база для эксплуатации бла в общем воздушном пространстве.Стр 1 из 14Следующая ⇒
Введение. Актуальность работы. В связи с рядом экономических и политических причин и глобальных экологических проблем, которые в настоящее время становятся все более актуальными и могут привести к возникновению кризисных ситуаций, все больше растет интерес к Арктике, как официальных арктических стран (Россия, Канада, США, Дания и Норвегия), так и других стран и международных организаций[5,10]. В недрах Арктики содержится огромное количество природных ресурсов, способных оказать существенное влияние на развитие человечества, а положительным или отрицательным окажется это влияние, зависит от человека. Согласно опубликованным исследованиям [7], в Арктике находиться 44 - 157 млрд. бар (6.0 - 21.5 млрд.т.) нефти и 770 - 2999 трлн. Развитие современных технологий может позволить Арктике стать важным транспортным коридором мирового значения, значительные перспективы имеют, в частности, трансарктические авиаперевозки - авиационные полеты из Северной Америки в Европу и Азию через Северный полюс. Ценность и потенциал региона сложно переоценить, в связи с чем растущий интерес к Арктике стран, не имеющих территориальных и исторических связей с регионом, закономерен. Сейчас для получения статуса арктической державы не достаточно географической принадлежности, это требует постоянной, длительной работы. Приоритетным направлением является научная исследовательская и инновационная деятельность в арктической зоне[4,10,14]. В настоящее время все большее количество стран, руководствуясь, прежде всего, экономическими интересами, выступает за интернацианализацию Арктики. Термин «интернациализация» в международном праве обозначает признание режима общего международного пользования. По сути, интернациализация арктической зоны заключается в признании центральной части Арктики зоной, находящейся за пределами национальной юристдикции России, Канады, США, Норвегии и Дании, с чем Россия не согласна, руководствуясь историческим первенством в освоении и изучении Арктики. Наша страна во все времена была бесспорным мировым лидером в освоении крайнего севера, и Арктики в частности. Масштабное экономическое освоение этой территории началось в СССР на 30-40 лет раньше, чем в других полярных странах. Нынешняя ситуация с отечественными научными исследованиями в Арктике довольно плачевна: в то время, как российская активность в регионе постоянно снижалась последние 15-20 лет, все другие приарктические страны только наращивали темпы освоения Арктики. В недрах этого труднодоступного района с очень суровым климатом прогнозируются крупные запасы полезных ископаемых, которые пока являются недоступными, но при дальнейшем развитии науки и техники будут представлять значительный интерес. В результате интернацианализации, использовать эти ресурсы на конкурентной основе смогут страны с высокоразвитыми технологиями, включая неарктические страны [10]. На данный момент Россия способна составить конкуренцию в регионе только благодаря мощному исследовательскому наследию, накопленному в позднесоветское время, благодаря безусловной приоритетности полярных исследований, обусловленных, в том числе, оборонными соображениями. Россия и по сей день является безусловным мировым лидером в некоторых областях освоения Арктики, например, в области ледокольного флота, в частности, атомного, однако в начале XXI века Россия утратила лидерство во многих направлениях. Скорость освоения мировым сообществом Арктики столь велика (о чем свидетельствуют, например, ежегодные конференции «Арктические рубежи», которые проходят в Тромсе, Норвегия)[9], что вероятность увеличения нашего отставания постоянно растет.
По протоколу выступления Президента РФ на заседании Совета Безопасности «О защите национальных интересов России в Арктике и Основами государственной политики Российской Ф едерации в Арктике на период до 2020 года и дальнейшую перспективу»[1], была разработана «Стратегия развития Арктической зоны Российской Федерации и обеспечения национальной безопасности на период до 2020 года» [2], задачи которой: 1) формирование системы наблюдения за состоянием окружающей среды, использующей современные средства наблюдения наземного, авиационного и космического базирования, обеспечивающие обнаружение и прогнозирование чрезвычайных ситуаций природного и техногенного характера, ликвидацию их последствий; 2) создание системы комплексной безопасности для защиты территорий, населения и критически важных объектов АЗР; 3) использование транспортных средств повышенной проходимости и воздушных судов для обнаружения людей, попавших в беду и осуществление санитарно-авиационной эвакуации больных; 3) комплексное изучение континентального шельфа и прибрежных территорий; 4) развитие малой авиации; Решение перечисленных выше задач возможно путем создания соответствующих модификаций базовых беспилотных летательных аппаратов (БЛА). Заинтересованность в их применении для своих целей определяет особые роль и место таких комплексов в системе специализированной техники министерств и ведомств РФ. Беспилотная авиация одно из самых динамично развивающихся направлений в авиации на сегодняшний день. Маркетинговые исследования прогнозируют рост доходов глобального рынка БЛА до 18 миллиардов долларов США в 2020 году, что является самым высоким показателем среди сегментов мировой авиакосмической отрасли[4]. Взрывной рост рынка БЛА и связанных с ним услуг прогнозируется при преодолении в скором времени ряда технических и административных барьеров, ограничивающих использование БЛА в национальном воздушном пространстве. Основными областями использования БЛА в гражданском секторе экономики являются [12,13]: производственный, геофизический и экологический мониторинг; дистанционное зондирование; наблюдение и охрана. Непосредственно к задачам, которые можно решать на высоких широтах с помощью БЛА, можно отнести: • обнаружение малоразмерных воздушных и наземных объектов; • поиск и обнаружение морских судов; • контроль морских границ и правил рыболовства; • аэрофотосъемка, картография; • инспекция соблюдения договорных обязательств, например, режима «открытого неба»; • контроль гидро - метеообстановки и активно излучающих объектов; • геологоразведка; • разведка ледовой обстановки, слежение за волнением моря, поиск косяков рыбы; • охрана важных объектов (например, сотни тысяч километров трубопроводов топливно-энергетических компаний (ТЭК), которые слабо охраняются) и др.
Простая экономическая выгода подталкивает различные предприятия к принятию решений по использованию БЛА, и этот процесс, находящийся в данный момент в начальной стадии, будет неуклонно развиваться. Считается[13], что в таких сферах, как дистанционное зондирование земли, контроль коммуникаций и границ использование БЛА позволит снизить себестоимость услуг на порядок и даже больше по сравнению с традиционными космическими или авиационными системами.
Отечественная программа [17] по созданию беспилотной техники в интересах России призвана преодолеть сильное отставание в данной области от ведущих стран мира. Сегодня производить легкие БЛА в состоянии многие страны, в том числе и Россия. Большое число российских компаний выпускает достаточно качественные образцы небольших БЛА малого радиуса действия, способных совершать полеты на малых высотах. Такие БЛА используются российскими силовыми ведомствами, МЧС, гражданскими компаниями и даже продаются за рубеж. Однако с высотными БЛА, обладающими значительной дальностью полета все не так хорошо, в этой области лидерство США и Израиля является неоспоримым. Даже европейские страны вынуждены приобретать их технику, хотя и продолжают работы по разработке собственных моделей. Применение БЛА в гражданском секторе в настоящее время находится в ожидании решения некоторых технических и организационных проблем, без чего невозможно стабильное использование БЛА. Основные проблемы связаны с использованием воздушного пространства, выделением частотного диапазона для управления БЛА и передачей информации с борта на землю и наоборот. Отсутствие законодательной и нормативной базы в РФ в области беспилотной авиации создает разработчикам и потенциальным потребителям серьезные проблемы. Даже в оборонной области проектные работы регламентируются общетехническими требованиями 20-летней давности, а для проектирования коммерческих БЛА никакой нормативной базы не существует вовсе. В настоящее время в правительстве идет работа над программой возрождения малой авиации, в которую составной частью войдет и беспилотная авиация. В условиях, когда рынок имеет большой потенциал для роста, необходимо консолидировать усилия разработчиков, заказчиков и всех ветвей власти[11].
Применение БЛА на высоких широтах имеет целый ряд технических сложностей, к которым можно отнести: - сложные метеоусловия; - отсутствие наземной инфраструктуры; - влияния внешних помех на радионавигационное обеспечение (особенно для выполнения продолжительных полетов) [16,28,29,40]; - также к беспилотным и дистанционно пилотируемым аппаратам, для их успешного применения, выдвигают первоочередные требования по массогабаритным характеристикам, автономности функционирования, минимального энергопотребления и стоимости. Залогом успешного решения задач управления БЛА во многом является высокий уровень развития измерительной техники. Эксплуатационные характеристики беспилотных летательных аппаратов сильно зависят от совершенства бортового оборудования, в частности, от качества информационно-измерительных сигналов, которые используются в управлении. Источником данных сигналов о параметрах движения, таких как местоположение, ориентация, скорость и другие, являются различные измерительные системы и навигационные комплексы (НК). Измерительные сигналы вышеуказанных систем имеют погрешности из-за конструктивных особенностей и условий функционирования БЛА. Для повышения точности измерительной информации необходимо исследовать причины возникновения погрешностей и их последующую компенсацию путем применения алгоритмов. На высоких широтах условия окружающей среды сложны для функционирования БЛА из-за пассивных и активных помех и активного противодействия, в связи с чем, их системы управления (СУ) должны обеспечивать высокую точность движения, эффективное маневрирование и др. Осуществленные отечественными и зарубежными авиакомпаниями полёты по трассам «Polar-1», «Polar-2», «Polar-3» и «Polar-4» показывают низкую эффективность систем наблюдения, связи и управления ВС над акваторией Северного Ледовитого океана в различные периоды года[15]. Навигационное обеспечение влияет на безопасность, надежность и экономические характеристики выполнения полета, поэтому особенно важно обеспечить точность определения координат, непрерывность и целостность передачи данных о положении БЛА при их эксплуатации на высоких широтах. Таким образом, к основным проблемам эксплуатации беспилотных летательных аппаратов на высоких широтах относятся: • отсутствие нормативно-законодательной базы в РФ для использования БЛА на высоких широтах; • сложные метеоусловия, при эксплуатации БЛА; • недостаточное навигационное обеспечение БЛА на высоких широтах[16]. • требования по энергозатратам, простоте и стоимости полетов БЛА на высоких широтах.
Сложившееся положение в области управления БЛА, изложенные выше проблемы и предопределили актуальность темы диссертации, направленной на разработку методов управления беспилотными летательными аппаратами на высоких широтах, исследование и улучшение точности определения координат, целостности и непрерывности навигационных характеристик БЛА, эксплуатируемых на высоких широтах. Объектом исследования в работе являются методы и оборудование навигационного обеспечения беспилотных летательных аппаратов на высоких широтах. Предметом исследований – влияние внешней среды на точностные характеристики и характеристики надежности навигационных систем беспилотных летательных аппаратов на высоких широтах. Цели и задачи исследования. Целью диссертационной работы является разработка рекомендаций по улучшению точностных и надежностных характеристик навигационных систем БЛА на высоких широтах для решения задач длительных полетов и специальных работ, связанных с необходимость высокоточного определения координат. Для достижения поставленной цели необходимо решить следующие задачи: · Провести анализ технических характеристик беспилотных летательных аппаратов и областей их применения для решения задач народного хозяйства страны на высоких широтах. · Систематизировать требования к методам управления полетами БЛА в общем воздушном пространстве, обеспечивающим безопасность полетов всех участников воздушного движения. · Провести анализ экспериментальных данных о работе современных навигационных систем на высоких широтах. · Рассмотреть факторы, воздействующие на работу навигационных систем на высоких широтах. · Рассмотреть методы управления БЛА на высоких широтах. · Разработать рекомендации по методам высокоточного пилотирования БЛА на высоких широтах и составу навигационного оборудования. Методы исследования При решении поставленных задач в работе были использованы результаты экспериментальных исследований. При выполнении аналитических исследований применялись общие методы системного анализа, методы математического моделирования. Основными исходными данными для проведения исследований являются: -соответствующие положения нормативно-правовых документов; -протоколы испытаний навигационного оборудования на высоких широтах; -результаты выполненных научно-исследовательских и опытно- конструкторских работ. Научная новизна диссертационной работы состоит в том, что в ней впервые предложены пути улучшения точностных и надежностных показателей навигационных систем БЛА эксплуатируемых на высоких широтах. Практическая значимость диссертационной работы состоит в том, что предложенные рекомендации улучшения точностных и надежностных характеристик в высоких широтах позволяют: Обеспечивать требуемый уровень безопасности и выполнения специальных задач на высоких широтах. Обеспечить требуемый уровень целостности работы навигационного оборудования на высоких широтах, при отсутствии сигналов от внешних источников. На защиту выносятся · Рекомендации по улучшению точностных и надежностных характеристик беспилотных летательных аппаратов при их использовании на высоких широтах · Рекомендации по построению автономной навигационной системы с использованием компонентов искусственного интеллекта Апробация результатов Основные научные положения и результаты работы докладывались и обсуждались на Международных научно-технических конференциях Публикация результатов Основные научные результаты диссертации опубликованы в Структура и объем работы.
Глава 1. Анализ требований к навигационному обеспечению беспилотных летательных аппаратов для решения задач народного хозяйства страны на высоких широтах. 1.1.Требования к обеспечению безопасности полётов беспилотных летательных аппаратов в общем воздушном пространстве. Требование к навигационному обеспечению. Требования к навигационному обеспечению БЛА определяются в первую очередь безопасностью выполнения полётов. При выборе критериев качества работы средств навигационного обеспечения полётов БЛА в высоких широтах необходимо учитывать требования руководящих документов ИКАО, ЕВРОКОНТРОЛЯ и МТ РФ [30]. Готовность навигационных средств работать в условиях воздействия неоднородностей ионосферы, тропосферы и подстилающей поверхности, определяются следующими характеристиками: 1) Точностные характеристики (погрешности определения координат местоположения, проекций скорости, параметров угловой ориентации). Согласно требованиям к точности определения координат и высоты полёта ВС[22], в таблице 1.2. приведены требуемые среднеквадратичные погрешности определения плановых координат и высоты полёта воздушного судна. Таблица 1.2
Т.к. на данный момент основная цель использования БЛА, это специальные полёты, то для эффективного и безопасного использования беспилотных летательных аппаратов на высоких широтах, необходимо, чтобы НК соответствовал требованиям по определению координат СКО=1…10 м и высоты СКО=1-5 м. Высокая точность функционирования в сложных условиях на высоких широтах, должна обеспечиваться высокой надежностью работы каждого из средств или комплекса в целом при подготовке к применению в течение заданного промежутка времени. 2) Надежностные характеристики: - доступность (готовность), мерой которой является вероятность работоспособности перед выполнением той или иной навигационной задачи (НЗ) или в процессе ее выполнения, согласно требованиям должна составлять 0,999…0,99999 при маршрутных полётах и при полёте в зоне аэродрома 0,99999; - целостность, мерой которой является вероятность выявления отказа в течение времени, не превышающее заданное, должна составлять 0,999 и при заходах на посадку по категориям 0,999999;0,9999999;0,9999999995; - непрерывность обслуживания, мерой которой служит вероятность работоспособности системы в течение наиболее ответственных отрезков времени выполнения навигационного задания (НЗ). Непрерывность работы средств навигационного обеспечения полётов ВС в условиях влияния на сигналы неоднородностей ионосферы, тропосферы и подстилающей поверхности Земли является основным требованием к надежности и точности работы средств навигации. Временные или полные отказы этих средств могут привести к необратимым процессам при полёте ВС на высоких широтах. Погрешности БИНС. Необходимо проанализировать погрешности, возникающие в процессе эксплуатации БИНС. Режим (алгоритм) работа ИНС, когда её элементы и устройства идеальны (не имеют инструментальных погрешностей) и начальные условия функционирования системы точно соответствуют начальным обстоятельствам движения объекта, называют режимом (алгоритмом) идеальной работы. В реальных условиях инерциальным чувствительным элементам присущи различного рода погрешности. Режим работы ИНС, при котором её элементы функционируют с погрешностями и начальные условия не соответствуют начальным обстоятельствам движения объекта называют возмущением. Уравнения для отклонения переменных, характеризующих состояния БИНС, от их значений при идеальной работе, называют уравнением погрешностей[31]. Анализируя погрешности, можно в определенной степени упростить алгоритмы, по которым работает вычислительное устройство, а также выработать обоснованные требования к коррекции БИНС. Ошибки БИНС в случае неточного определения вертикали. Рассмотрим случай, когда акселерометры и гироскоп функционируют без ошибок, а вертикаль в начальный момент задана с ошибкой. В этом случае безошибочные показания акселерометров определяются равенствами[30](предполагается, что:
где nx, ny – величина кажущегося ускорения относительно осей х и y, VXg - скорость, θ - угол. Для определения местоположения БЛА (широты φ) необходимо перепроектировать показания акселерометров (2.1) в географическую систему координат, т.е. на оси О
где Для малого угла β, подставив (2.2) в (2.1), получим проекцию кажущегося ускорения:
Таким образом, после пересчёта данных в географическую систему координат в проекции кажущегося ускорения Согласно дальнейшим расчетам [31] β(t)= где
Эту частоту можно трактовать, как частоту малых незатухающих колебаний в поле силы тяжести Земли физического маятника, приведенная длина которого равна расстоянию от центра Земли до объекта, движущегостя на высоте h. Числовое значение частоты Шулера равно Из решения следует, что вычисленная вертикаль будет совершать колебания относительно истинной вертикали с периодом Шулера. Согласно расчётам [31], ошибка определения скорости связана с ошибкой построения вертикали.
Ошибка определения широты: Δφ= Ошибка определения пройденного расстояния ΔS: Δ S = R На рисунке 2.1 показаны ошибки БИНС, вызванные неточным заданием вертикали, таким образом, отклонение аналитической вертикали от истинной, ошибки в определении скорости и местонахождения БЛА имеют колебательный характер, период их колебания равен периоду Шулера.
Рисунок 2.1 Ошибки БИНС, вызванные неточным задание вертикали: а) ошибка построения вертикали б) ошибка определения скорости, в) ошибка в определении пройденного расстояния; 1 - Оценка погрешностей БИНС. С помощью стенда полунатурного моделирования был произведен эксперимент, описанный в [33], который иллюстрирует накопление погрешности бесплатформенной инерциальной навигационной системой при автономной работе.
P и c. 2.7 Траектория модели и расчетная без СНС Как видно из рисунка 2.7, на котором приведены модельная и расчетная траектории, характерные для 120 секунд полета планирующего объекта. Ошибка определения координат объекта через 120 секунд превышает 100 метров. Такая ошибка неприемлема для задач ориентации и навигации большинства беспилотных объектов. Из выше сказанного следует, что при длительной работе автономной режиме накопление погрешностей приводит к тому, что вырабатываемая ИНС навигационная информация утрачивает необходимую адекватность и тогда целесообразно корректировать БИНС с помощью внешних или внутренних источников навигационной информации.
Рис 2.8. Траектория модели и расчетная с СНС На рисунке 2.8 представлена модельная и расчетная траектория длительностью около 120 секунд, характерная для планирующего объекта. Из рисунка видно, что составляющие вектора координат не расходятся с модельными более чем на 5 метров через 120 секунд полета, без улучшения процедуры калибровки. Для повышения точности определения вектора скорости необходимо корректировать его значение, рассчитанное в БИНС, используя сигнал от СНС, а также совершенствовать калибровку датчиков угловых скоростей и линейных ускорений, чтобы уменьшить влияние возмущенного режима работы БИНС. Таблица 2.2 Характеристки современных БИНС: Система |
Инерциальный датчик |
Страна |
Точность (без СНС / с СНС) | |||||||||||||||||||||||||||||||||||||||||||||
| БИНС-1000МЛ | ЛГ/ВОГ | Россия | 1 nm / 20 m | ||||||||||||||||||||||||||||||||||||||||||||||
| iNAV-FJI | ВОГ | Германия | 3 nm / 0,3 m | ||||||||||||||||||||||||||||||||||||||||||||||
| НСИ-2000 | ЛГ | Россия (МО, Долгопрудный) | 2,7 nm / 100 m | ||||||||||||||||||||||||||||||||||||||||||||||
| НСИ-2000МТ | ЛГ | Россия (МО, Долгопрудный) | 2,7 nm / 100 m | ||||||||||||||||||||||||||||||||||||||||||||||
| ЛИНС-100РС | ЛГ | Россия-Франция | 1 nm / 20 m | ||||||||||||||||||||||||||||||||||||||||||||||
| ВЕКТОР-100 | ? | Россия-Франция | 2 nm / - | ||||||||||||||||||||||||||||||||||||||||||||||
| БИНС-2015 | ЛГ | Россия (Москва) | 1 nm / 44 m | ||||||||||||||||||||||||||||||||||||||||||||||
| БИМС-Т | Россия (Москва) | 2 nm / 30 m | |||||||||||||||||||||||||||||||||||||||||||||||
| БИНС-501 | ВОГ | Россия (Зеленоград) | 2,15 nm / 20 m | ||||||||||||||||||||||||||||||||||||||||||||||
| ИНС-2000 | ЛГ | Россия (Москва) | 2 nm / 40 m | ||||||||||||||||||||||||||||||||||||||||||||||
| TOTEM 3000 | ЛГ | Канада | н/д |
 (до 100 трлн.
(до 100 трлн.  ) природного газа, из которых более 70% расположены под морским дном. По оценкам зарубежных специалистов, это составляет около 25% от всех неразведанных запасов углеводородов на планете. Крупнейшие запасы сосредоточены на территории российской Западной Арктики и у побережья Аляски. На данный момент Арктическая зона России (АЗР) обеспечивает примерно 11% национального дохода страны, при том, что здесь проживает только около 1,4% её населения. На этой территории добывается значительное количество полезных ископаемых, имеющих стратегическое значение для России. Например, в арктической зоне находится более половины российских запасов апатитового концентрата, олова, титана, никеля, вольфрама, меди, ртути, хрома, золота, серебра, алмазов, марганца. Также, регион обладает огромными биоресурсами. Рыбное хозяйство АЗР обеспечивает до 15% потребляемых в России морепродуктов. Помимо полезных ископаемых и биоресурсов в данной зоне сохраняется существенный промышленный потенциал. Здесь расположены многочисленные объекты нефтегазовой отрасли, многокилометровые магистральные трубопроводы, шахты и электростанции, морские порты.
) природного газа, из которых более 70% расположены под морским дном. По оценкам зарубежных специалистов, это составляет около 25% от всех неразведанных запасов углеводородов на планете. Крупнейшие запасы сосредоточены на территории российской Западной Арктики и у побережья Аляски. На данный момент Арктическая зона России (АЗР) обеспечивает примерно 11% национального дохода страны, при том, что здесь проживает только около 1,4% её населения. На этой территории добывается значительное количество полезных ископаемых, имеющих стратегическое значение для России. Например, в арктической зоне находится более половины российских запасов апатитового концентрата, олова, титана, никеля, вольфрама, меди, ртути, хрома, золота, серебра, алмазов, марганца. Также, регион обладает огромными биоресурсами. Рыбное хозяйство АЗР обеспечивает до 15% потребляемых в России морепродуктов. Помимо полезных ископаемых и биоресурсов в данной зоне сохраняется существенный промышленный потенциал. Здесь расположены многочисленные объекты нефтегазовой отрасли, многокилометровые магистральные трубопроводы, шахты и электростанции, морские порты.
 (2.1)
(2.1) и О
и О  Однако за счёт неточного задания вертикали сигналы акселерометров (2.1) будут пересчитываться не на оси географического трехгранника, а на оси
Однако за счёт неточного задания вертикали сигналы акселерометров (2.1) будут пересчитываться не на оси географического трехгранника, а на оси  и
и  вычисленной системы координат. В этом случае получим:
вычисленной системы координат. В этом случае получим: (2.2)
(2.2) - проекция кажущегося ускорения на географическую систему координат, β - угол
- проекция кажущегося ускорения на географическую систему координат, β - угол (2.3)
(2.3) (2.4)
(2.4)

 , соответственно период Шулера Т=84,4[*].
, соответственно период Шулера Т=84,4[*]. (2.5)
(2.5) (2.6)
(2.6)
 2 -
2 -  3 -
3 -  .
.

Таким образом. Наиболее полная компенсация погрешностей ИНС осуществляется с помощью алгоритмической обработки информации с ИНС и дополнительного внешнего по отношению к ИНС датчика навигационной информации. Компенсация погрешностей в выходной информации системы обычно осуществляется посредством алгоритмов оценивания. Хорошо известный фильтр Калмана теоретически позволяет получить оптимальную оценку вектора состояния системы [33].
Навигационные комплексы представляют собой некоторое количество систем и датчиков, в основу принципа действия которых положены различные физические закономерности. Эти системы объединены алгоритмически. При функционировании ИНС на длительных интервалах времени (более 1 часа) без коррекции от спутников или стационарных станций углы отклонения гироскопа нарастают.
Точность корректируемых ИНС в значительной степени зависит от погрешностей внешнего источника информации и ошибок используемого алгоритма. В частности, от адекватности математической модели погрешностей ИНС.
Геометрический фактор.
Так же на точность определения пространственно-временных координат потребителя оказывает влияние взаимное расположение навигационных спутника и потребителя. Следовательно, возникает задача выбора оптимального рабочего созвездия спутников, при котором будет обеспечиваться заданная точность измерений. Существует такое понятие, как коэффициент геометрии  являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения навигационного спутника и потребителя (в иностранной литературе используется обозначение GDOP – в англоязычной литературе данная величина называется Geometric Dilution of Precision).[34]
являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения навигационного спутника и потребителя (в иностранной литературе используется обозначение GDOP – в англоязычной литературе данная величина называется Geometric Dilution of Precision).[34]
Коэффициент геометрии численно определяется для случая, когда погрешности определения псевдодальностей до четырех спутников равновелики и не коррелированны. В общем случае его можно представить выражением
 (2.35)
(2.35)
Выражение может быть записано в другом виде:
 (2.36)
(2.36)
где 
 –пространственный (PDOP - Position Dilution of Precision) коэффициент;
–пространственный (PDOP - Position Dilution of Precision) коэффициент;  – временной (TDOP – Time Dilution of Precision).
– временной (TDOP – Time Dilution of Precision).
В свою очередь, пространственный коэффициент может быть разбит на составляющие, характеризующие точность определения координат потребителя в горизонтальной и вертикальной плоскостях:
 (2.36)
(2.36)
где  – горизонтальный (HDOP Horizontal Dilution of Precision) коэффициент.
– горизонтальный (HDOP Horizontal Dilution of Precision) коэффициент.
 - вертикальный (VDOP Vertical Dilution of Precision) коэффициент.
- вертикальный (VDOP Vertical Dilution of Precision) коэффициент.
Геометрические соотношения, характеризующиеся положением спутников относительно друг друга, могут влиять на наличие погрешности спутниковых измерений.
Эти данные можно использовать для оценки точности определения координат местоположения потребителя в горизонтальной (режим двумерных измерений или 2-D) и вертикальной плоскостях, в трехмерном пространстве (режим трехмерных измерений или 3-D) и т. д. Так, используя потенциальное значение суммарной погрешности определения псевдодальности, приведенной в табл. 1.4, можно рассчитать потенциальную погрешность определения пространственного положения (сферическая ошибка) потребителя, например, для четырех НС: σcфер = К GPσдал = 15,2 м. Аналогичные ошибки получают при определении координат потребителя в горизонтальной плоскости и по высоте:
σгор.пот = КGH σдал = 8,7 м,
σвер.пот = КGV σдал = 12,4 м
Суть в том, что в зависимости от взаимного расположения спутников на небосовде геометрические соотношения, которыми характеризуются это расположение, могут многократно увеличивать или уменьшать все неопределнности. Геометрический фактор снижения точности является индикатором надежности представления точности позиционирования. В случае, кода спутники расположены на небесной сфере достаточно широко (сильная геометрия), искомое положение может находиться в пределах заштрихованной области, и границы возможной ошибки малы. Иными словами, чем больше угол между направлениями на спутники, тем точнее местоопределение.
В таблице 2.5 указаны значение DOP и их характеристики точности.
Таблица 2.5
| Значение DOP | Точность | Описание |
| <1 | Идеальная | Рекомендуется к использованию в системах, требующих максимально возможную точность во всё время их работы |
| 2-3 | Отличная | Достаточная точность для использования результатов измерений в достаточно чувствительной аппаратуре и программах |
| 4-6 | Хорошая | Рекомендуемый минимум для принятия решений по полученным результатам. Результаты могут быть использованы для достаточно точных навигационных указаний. |
| 7-8 | Средняя | Результаты можно использовать в вычислениях, однако рекомендуется позаботиться о повышении точности, например, выйти на более открытое место. |
| 9-20 | Ниже среднего | Результаты могут использоваться только для грубого приближения опредления местоположения |
| 21-50 | Плохая | Обычно такие результаты должны быть отброшены. |
Согластно исследованию [15], в котором получены значения были полченны GDOP (Рисунки 2.10,2.11,2.12) Когда в области видимости находятся слишком близко друг к другу («слабая» геометрия), размер заштрихованной увеличивается, что увеличивает неопределенность положения.
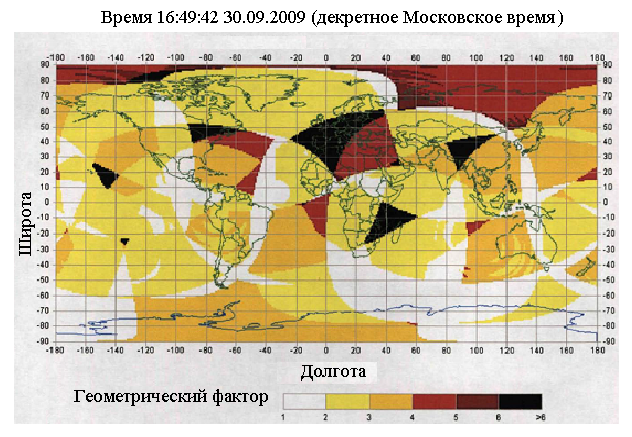
Рис 2.10. Значения позиционного геометрического фактора 30 сентября 2009 года в 16:49 по декретному Московскому времени

Рис. 2.11 Значения позиционного геометрического фактора 8 декабря 2009 года в 16:09 по декретному Московскому времени

Рис. 2.12 Значения позиционного геометрического фактора 16 декабря 2009 года в 18:06.
В различные промежутки времени (Рис. 2.10 и Рис.2.11 Рис 2.12)., видно, что значение геометрического фактора, при неполной группировки ГЛОНАСС – 21 НКА, периодически появляются мертвые зоны ≥6(темная область), что способствует ухудшению навигационной обстановки, определения от ГЛАНАСС отсутствуют, а также ухудшается точность определения навигационных параметров..
Рассмотрим точностные характеристики при использовании сигналов СНС ГЛОНАСС с неполной группировкой НКА по состоянию на 06 ноября 2008 года (группировка СРНС ГЛОНАСС составляла 21 НКА). В табл.8 приведены рассчитанные средние вероятности (P) наблюдения заданного числа НКА (≥4) при использовании неполной группировки ГЛОНАСС и соответствующие геометрические факторы снижение точности по местополодению (PDOP), снижение точности в горизонтальной плоскости (HDOP), снижение точности в вертикальной плоскости (VDOP).
Таблица 2.6 Характеристики наблюдаемости НКА ГЛОНАСС



