Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Глава 4 моделирование и оценка параметров, методов компенсирования погрешностей бла при их использовании на высоких широтах.Содержание книги
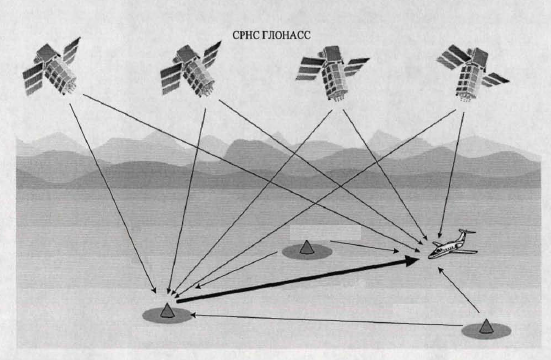
Поиск на нашем сайте Рассмотрим модель автономно навигационной системы с использованием НП и СНС.
Рисунок 4.1. Автономная навигационная система с использование НП и СНС.
где d – геометрическое расстояние, м D – псевдодальность, м R- векетор-столбец координат, ξ – единичный вектор, i – индекс НКА, j – индекс НП, u – индекс АП r –индекс синхроспутника (СС) Тогда выражение для разности ПД для АП можно записать:
(4.2) Аналогичным образом определим разность ПД для СС:
Данная система является асинхронной, т.е. излучение НС, а измерения радионавигационных параметров в АП, не синхронизованы по времени и величина взаимного смещения шкалы времени ПС относительно единого времени неизвестна. Но если вычесть разность ПД, полученных по формулам (3.2) и (3.3), тогда из уравнений можно исключить неизвестную величину, связанную с расинхронизацией шкалы времени ПС относительно единого времени:
(4.4) Уравнение (4.4) при m используемых НП в системе записываеться в виде систем навигационных уравнений: > (4.5)
Решение полученной системы навигационных уравнений по методу наименьших квадратов позволяет определить местоположение АП. Полученные данные точности [48,49] точности определения навигационных параметров АП отображены на рисунке 3.2
Рисунок 4.1 Модель, работающая совместо с СНС На рис. 3.3 представлена схема навигационной системы на основе сигналов НП, в которой с помощью относительно единого времени, которые передаются по каналу связи в аппаратуру потребителя (АП). Рассмотрим точностные и надежностные характеристики СНС работающий в совместном режиме по системам СНС и НП.
Тогда согласно [38] в системе уравнений ПД будут двух типов:
где -
. Рисунок.4.2 Показатели погрешностей измерения трех навигационных параметров (В, L, Н) при использовании навигационных сигналов от двух НП отображены на рис.4.3.
Рисунок 4.3 Радиовысотомеры (РВ) являются частью бортового оборудования различных летательных аппаратов (ЛА) и решают следующие задачи: — пилотирование самолетов и вертолетов на всех этапах полета от взлета до посадки, — определение высоты в системе управления автоматической посадки,— определение высоты орбиты космических аппаратов. Точность определения высоты является основной характеристикой высотомера. Требования к точности определения высоты варьируются в зависимости от решаемой задачи. Система измерения высоты должна обеспечивать безопасное эшелонирование самолета во всех режимах полета при высоте полета выше 300 м. При посадке ВС необходимо обеспечивать высокую точность определения навигационных параметров, особенно с высоты захода на посадку (150 м). Одним из типовых требований к РВ является обеспечение их работоспособности с допустимой погрешностью при изменении положения ВС: углах крена до 40 - 50° и углах тангажа до 20°. Для самолетов и вертолетов уменьшения ошибок из-за эволюции добиваются путем применения антенн с широкими ДН. При этом антенны РВ не должны выступать за линию фюзеляжа, чтобы не нарушать его обтекаемость. Характеристики современных высотомеров показаны в таблице 4.1.
На рис. 4.4 представлены результаты точности определения навигационных параметров АП СРНС (моделировалась полная орбитальная группировка НКА СРНС ГЛОНАСС [51]) при использовании комплексированной системы навигации на основе НКА, ПС, ДПС и РВ.
Рисунок 4.4 Полученные результаты позволяют сделать вывод о том, что для наилучшего разделения и приёма сигналов в канале передачи информации с использованием шумоподобных сигналов (ШПС) сигналов [15,53,54], несущую частоту сигнала лучше модулировать псевдослучайными последовательностями, которые формируются полиномами нечетной длины или оперировать ограниченным набором последовательностей, генерируемых полиномом четной длины. В противном случае при использовании полного набора псевдослучайных последовательностей сформированных образующими полиномами четной длины существует вероятность превышения в корреляторе приемника значений «паразитных» пиков основного корреляционного пика, вследствие чего приемник не сможет демодулировать полученный сигнал.
|
||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 328; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.50.71 (0.008 с.) |



 (4.1)
(4.1)

 +
+
 +
+ (4.3)
(4.3)



 (4.6)
(4.6) – прямоугольные координаты НКА или НП
– прямоугольные координаты НКА или НП - псевдодальность j- го НКА или НП,
- псевдодальность j- го НКА или НП, - расхождение шкал времени НКА, НП и АП
- расхождение шкал времени НКА, НП и АП − индекс ПД используемой при решении системы уравнений.
− индекс ПД используемой при решении системы уравнений.