

Мы поможем в написании ваших работ!
ЗНАЕТЕ ЛИ ВЫ?
|
Постановка задачи оптимального управления.
Похожие статьи вашей тематики
Постановка задачи оптимального управления в качестве обязательной составляющей содержат исходную информацию о динамических свойствах объекта управления, цели управления и ограничениях на энергетические возможности сигнала управления и допустимую область значений переменных состояния. В общем случае описание динамического объекта в пространстве состояний имеет вид:
 , (1) , (1)
где  - вектор переменных состояний, - вектор переменных состояний,  - вектор управляющих воздействий. Ограничения на эти переменные можно представить в форме: - вектор управляющих воздействий. Ограничения на эти переменные можно представить в форме:
 , (2) , (2)
где  и и  - некоторые заданные множества. Цель управления объектом обычно выражается в виде начальных и конечных условий (граничные условия): - некоторые заданные множества. Цель управления объектом обычно выражается в виде начальных и конечных условий (граничные условия):
 (3) (3)
В некоторых случаях состояние  может быть представлено системой уравнений. Управление может быть представлено системой уравнений. Управление  необходимо выбрать так, чтобы обеспечить перевод объекта из состояния необходимо выбрать так, чтобы обеспечить перевод объекта из состояния  в состояние в состояние  . В большинстве случаев существует множество функций . В большинстве случаев существует множество функций  , позволяющих обеспечить выполнение цели управления. Эти управления называют допустимыми. При этом, очевидно, что каждому допустимому управлению , позволяющих обеспечить выполнение цели управления. Эти управления называют допустимыми. При этом, очевидно, что каждому допустимому управлению  соответствует своя допустимая траектория соответствует своя допустимая траектория  . При желании из всех допустимых управлений можно выбрать наилучшее . При желании из всех допустимых управлений можно выбрать наилучшее  в смысле выбранного критерия в смысле выбранного критерия  , который на этом управлении принимает экстремальное значение: , который на этом управлении принимает экстремальное значение:
 (4) (4)
На основании исходных данных постановка задачи оптимального управления в математической форме записывается следующим образом:
Определить  , ,  , ,  , ,  , , 
Пример. При описании движения ракеты, запускаемой в космос, векторное уравнение (1) в системе двух координат плоскости полета может быть представлено в виде [1]:
 , ,  , ,  , ,  , ,  , (1п) , (1п)
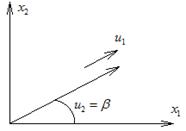
Рис.1.
Где  , ,  - координаты положения ракеты, - координаты положения ракеты,  , ,  - координаты скорости, - координаты скорости,  - масса ракеты, - масса ракеты,  - величина тяги двигателя, - величина тяги двигателя,  - угол между направлением тяги и осью , - угол между направлением тяги и осью ,  - секундный расход массы. Кроме силы тяги на ракету действует сила тяжести, сопротивление атмосферы и т.д. Суммарные проекции этих сил на координатные оси обозначены через - секундный расход массы. Кроме силы тяги на ракету действует сила тяжести, сопротивление атмосферы и т.д. Суммарные проекции этих сил на координатные оси обозначены через  и и  (рис.1). Для рассматриваемой задачи множество - это некоторая заданная область пространства, окружающего Землю, допустимая для движения ракеты. Траектория ракеты не может пересекать поверхность Земли, не должна заходить в зону радиационных поясов и т.п. Управление полетом ракеты осуществляется за счет регулирования величины и направления вектора тяги двигателя: управляющие функции – это тяга и угол . Тогда множество - это множество тех значений (рис.1). Для рассматриваемой задачи множество - это некоторая заданная область пространства, окружающего Землю, допустимая для движения ракеты. Траектория ракеты не может пересекать поверхность Земли, не должна заходить в зону радиационных поясов и т.п. Управление полетом ракеты осуществляется за счет регулирования величины и направления вектора тяги двигателя: управляющие функции – это тяга и угол . Тогда множество - это множество тех значений  , которые допустимы из конструктивных соображений. Кроме того, могут быть заданы начальное положение, скорость и масса ракеты. Тогда первое из условий (3) можно представить: , которые допустимы из конструктивных соображений. Кроме того, могут быть заданы начальное положение, скорость и масса ракеты. Тогда первое из условий (3) можно представить:
 , ,  , ,  , ,  , , 
где  , ,  , ,  , ,  , ,  - фиксированные числа. - фиксированные числа.
Предположим, что ракета должна быть выведена на круговую орбиту заданного радиуса  . Тогда второе из условий (3) будет иметь вид: . Тогда второе из условий (3) будет иметь вид:
 (2п) (2п)
где  - скорость соответствующего кругового вращения. Первое их этих условий означает, что точка с координатами - скорость соответствующего кругового вращения. Первое их этих условий означает, что точка с координатами  в момент времени в момент времени  направлена по касательной к окружности заданного радиуса R. Второе условие означает, что радиус орбиты R и скорость движения по круговой орбите , имеющие соответствующие компоненты и направлена по касательной к окружности заданного радиуса R. Второе условие означает, что радиус орбиты R и скорость движения по круговой орбите , имеющие соответствующие компоненты и  , ортогональны, т.е. скорость точки в момент направлена по касательной к окружности заданного радиуса. Из третьего условия следует, что скорость движения объекта при , ортогональны, т.е. скорость точки в момент направлена по касательной к окружности заданного радиуса. Из третьего условия следует, что скорость движения объекта при  должна равняться скорости движения по круговой орбите. Условия (2п) гарантируют, что если при двигатель будет выключен, то последующее свободное движение будет движение по окружности. Цель управления содержится во втором условии (3). Достижение системой (1п) за заданное время должна равняться скорости движения по круговой орбите. Условия (2п) гарантируют, что если при двигатель будет выключен, то последующее свободное движение будет движение по окружности. Цель управления содержится во втором условии (3). Достижение системой (1п) за заданное время  некоторого конечного состояния (например, достижение аппаратом заданной высоты, или выход аппарата на орбиту) может быть реализовано бесчисленным множеством вариантов управляющих воздействий (или программных движений). Это обстоятельство позволяет ставить вопрос об отыскании управления, оптимального в смысле выбранного критерия. Тогда это уже будет постановка задачи оптимального управления. В технических задачах часто возникает вопрос об отыскании наиболее «экономного» управления. В рассматриваемом примере управление ракетой будет более экономичным, если меньшее количество топлива будет израсходовано. Математическое выражение этого факта, согласно последнему уравнению (1п), состоит в том, что управление должно быть выбрано из условия минимума интеграла: некоторого конечного состояния (например, достижение аппаратом заданной высоты, или выход аппарата на орбиту) может быть реализовано бесчисленным множеством вариантов управляющих воздействий (или программных движений). Это обстоятельство позволяет ставить вопрос об отыскании управления, оптимального в смысле выбранного критерия. Тогда это уже будет постановка задачи оптимального управления. В технических задачах часто возникает вопрос об отыскании наиболее «экономного» управления. В рассматриваемом примере управление ракетой будет более экономичным, если меньшее количество топлива будет израсходовано. Математическое выражение этого факта, согласно последнему уравнению (1п), состоит в том, что управление должно быть выбрано из условия минимума интеграла:
 (3п) (3п)
Функция  называется оптимальным управлением или оптимальной программой, если она удовлетворяет всем ограничениям, обеспечивает достижение объектом цели управления и доставляет минимальное значение интегралу (3п). Не менее часто встречается и другая постановка задачи. Например, при заданной энергии, которая может быть израсходована для вывода ракеты, заданном времени вывода и заданном расстоянии до перигея необходимо так построить программу управления, то есть выбрать функцию и соответствующую ей траекторию называется оптимальным управлением или оптимальной программой, если она удовлетворяет всем ограничениям, обеспечивает достижение объектом цели управления и доставляет минимальное значение интегралу (3п). Не менее часто встречается и другая постановка задачи. Например, при заданной энергии, которая может быть израсходована для вывода ракеты, заданном времени вывода и заданном расстоянии до перигея необходимо так построить программу управления, то есть выбрать функцию и соответствующую ей траекторию  , чтобы расстояние до апогея было максимальным. При соответствующем выборе переменных эта техническая постановка задачи сводится к отысканию управления, минимизирующего функционал , чтобы расстояние до апогея было максимальным. При соответствующем выборе переменных эта техническая постановка задачи сводится к отысканию управления, минимизирующего функционал

где  - некоторая компонента вектора . Первая из задач называется задачей Лагранжа, вторая – задачей Майера. - некоторая компонента вектора . Первая из задач называется задачей Лагранжа, вторая – задачей Майера.
|




