
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование кривошипно-шатунногоСодержание книги
Поиск на нашем сайте
МЕХАНИЗМА ПО ПРЕДЛОЖЕННОЙ СХЕМЕ.
2.1. Постановка задачи. Исходные данные: машиностроительный чертеж, по которому определяются геометрические характеристики механизма (длины звеньев, размеры сечений), закон движения ведущего звена (угловая скорость вращения кривошипа), материал звеньев. Выходные данные: проведение комплексного расчета механизма по предложенной схеме "кинематика – динамика – прочность".
2.2. Кинематический расчет. Кинематический расчет кривошипно–шатунного механизма является первым шагом для проведения динамических расчетов, так как установление основных кинематических зависимостей необходимо для последующего изучения движения с учетом действия сил [7].
2.2.1. Расчет с использованием понятий темы "Кинематика точки". Исходные данные: машиностроительный чертеж, геометрические параметры звеньев, закон движения ведущего звена. Выходные данные: определить закон движения, скорости и ускорения для основных точек механизма.
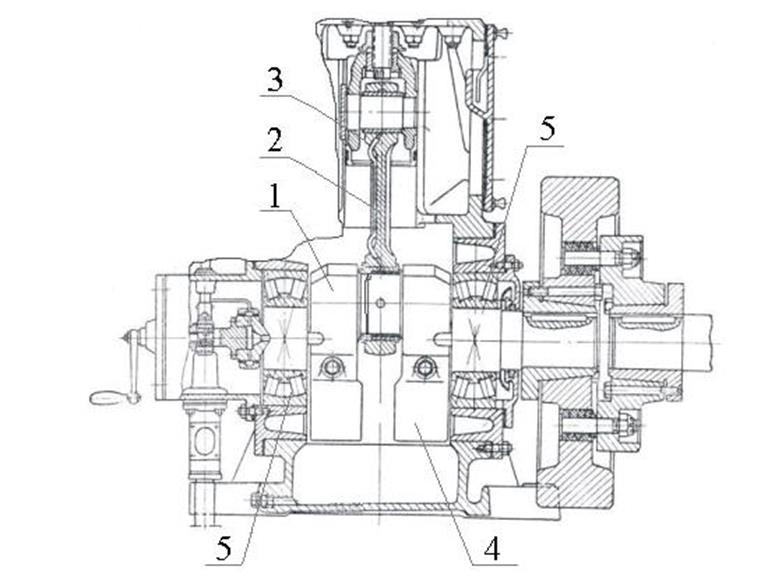
Кинематическая схема. Кинематический расчет механизма начинается с составления кинематической схемы, для построения которой используем машиностроительный чертеж (рис. 2) и имеющееся описание принципа работы механизма.
Рис. 2. Машиностроительный чертеж 1 – кривошип; 2 – шатун; 3 – ползун; 4 – противовес; 5 - подшипники
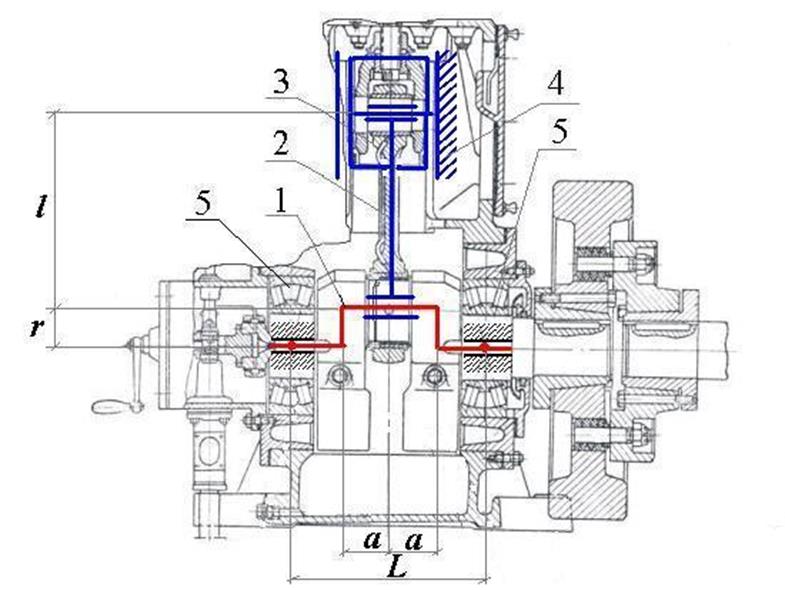
Покажем на машиностроительном чертеже упрощенное изображение звеньев механизма, согласно принятым обозначениям (рис. 3).
Рис. 3. К построению кинематической схемы 1 – кривошип; 2 – шатун; 3 – ползун; 4 – направляющая; 5 - подшипники
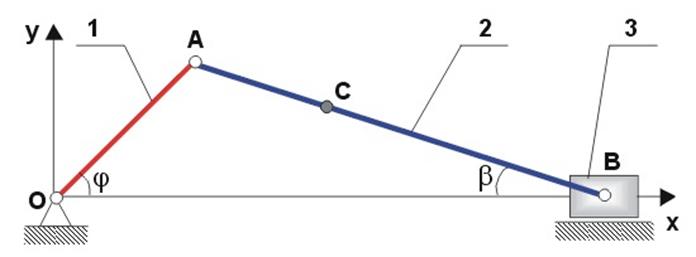
Следует обратить внимание на размеры звеньев, определенные по чертежу: ОА = r - радиус кривошипа (м); АВ = l - длина шатуна (м); а, L – длины участков кривошипа (м). После того, как по чертежу определили положение, вид и размеры основных звеньев, изобразим кинематическую схему механизма (рис. 4).
Рис. 4. Кинематическая схема механизма: 1 – кривошип; 2 – шатун; 3 – ползун Кривошипно-шатунный механизм ОАВ (рис. 4) состоит из звеньев: 1 - кривошип; 2 - шатун; 3 - ползун. Неподвижная стойка образует четвертое звено. Звенья соединены друг с другом шарнирами О, А и В. Кривошип ОА совершает вращательное движение относительно неподвижной точки О. При этом шатун АВ движется плоскопараллельно, а ползун В - возвратно-поступательно вдоль горизонтальной направляющей.
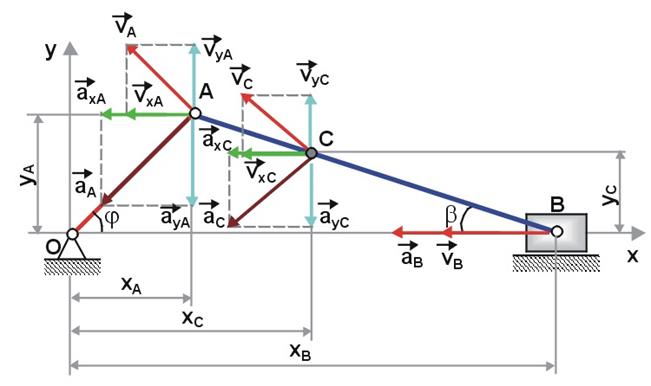
Определение закона движения основных точек механизма. Закон (уравнение) движения точки устанавливает зависимость положения точки в пространстве от времени. Существует три способа задания движения точки: векторный, координатный, естественный [7, 9]. Воспользуемся координатным способом задания движения: выберем связанную с телом отсчета систему декартовых координат Оху. Для расчета основных кинематических параметров за основу примем расчетную схему, представленную на рис. 5.
Рис. 5. Расчетная схема механизма
Зададим уравнения движения точек в координатной форме:
где Точка С является центром масс шатуна АВ. Согласно рекомендациям [4], для шатуна АВ примем соотношения длин: АС = 0,3 l; СВ = 0,7 l.
|
||||
|
|
Последнее изменение этой страницы: 2017-01-24; просмотров: 325; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.79.187 (0.006 с.) |

 ,
,  ,
, , yВ = 0,
, yВ = 0, ,
,  ,
, - угол поворота кривошипа ОА, рад;
- угол поворота кривошипа ОА, рад; - угловая скорость вращения кривошипа ОА, рад/сек;
- угловая скорость вращения кривошипа ОА, рад/сек; - угол наклона шатуна АВ к горизонту, рад.
- угол наклона шатуна АВ к горизонту, рад.


