
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Составление уравнений элементов САУ.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
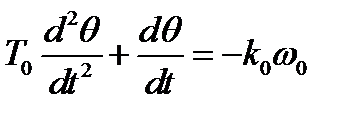
Введение Успешное решение задач автоматизации в настоящее время тесным образом связано с использованием современных технологий теоретических и практических разработок автоматических систем управления. Синтез структуры и определение параметров управляющего устройства выполняются в определенной последовательности по классической схеме. Вначале исследуются свойства управляемого объекта по его характеристикам. Структура и параметры объекта при этом считаются известными, процессы в объекте описываются нелинейными дифференциальными уравнениями. Нелинейность объекта вызвана нелинейностью одного из устройств с типовой нелинейной характеристикой. Определение требуемой структуры управляющего устройства ведется путем итераций от самых простых решений до сложных структур на основе требований технического задания. Из теории линейных систем известно, что монотонный характер переходной характеристики можно получить при плохом быстродействии системы управления.. Для исследования релейных систем высокого порядка на фазовой плоскости используется редуцирование или понижение порядка дифференциального уравнения. Из известных методов редуцирования приводится один, а именно, редуцирование путем приведения исходной системы к каноническому виду. Раздел 1. Основные сведения Решение задачи для следующих исходных данных: -постоянная времени объекта -коэффициент усиления объекта и регулирующего органа k0 =30 град/рад, -коэффициент усиления чувствительного элемента k1=0,25 А-в/град, - коэффициент усиления двигателя k2=2,5 рад/(В*с), -передаточное отношение редуктора i=1000, - коэффициент усиления цепи обратной связи kос=4,5 А-в/рад, -ампер-витки срабатывания реле -максимальное напряжение на выходе релейного усилителя Umax=125 В. Описание САУ Составление структурно-математической схемы САУ Структурно-математическая схемы системы автоматического регулирования температуры изображена на рис.3. В соответствии со структурно – математической схемой дифференциальное уравнение линейной части системы можно записать в следующем виде:
Подставим в уравнение (1.7) численные значения параметров и получим
Уравнение нелинейной части (1.7) дополняется уравнением нелинейного звена (1.3)
Раздел 3. Метод Ляпунова
Согласно структурно-математической схеме САУ температуры описывается следующими дифференциальными и алгебраическими уравнениями:
(3.1)
Введем обозначения:
Получим:
Общий вид системы нелинейных уравнений 2-го порядка, заданных в нормальной форме, представлен ниже:
Откуда следует:
Запишем уравнения в канонической форме. Для этого из коэффициентов уравнения составим определитель.
Для нашего случая определитель имеет вид:
Определим корни характеристического уравнения
Ввиду того, что в характеристическом уравнении имеется один нулевой корень, канонические уравнения записываются в следующем виде:
Определим постоянные
где Dik(λ) обозначает алгебраическое дополнение элемента i - той строки и k- го столбца определителя D(λ).
По формуле (3.7) определим:
Определим D(λ):
Поскольку λ1=0, то и
Для класса нелинейных систем, к которому принадлежит рассматриваемая система, достаточные условия устойчивости имеют вид:
Это условие приводит к следующему достаточному условию устойчивости рассматриваемой системы:
Раздел 8. Частотный метод Коэффициент затухания
где
в результате которой получаем:
Уравнение (4.1) будем решать графически. Для этого в передаточной функции линейной части системы:
произведем подстановку
Модуль этой функции
и фаза
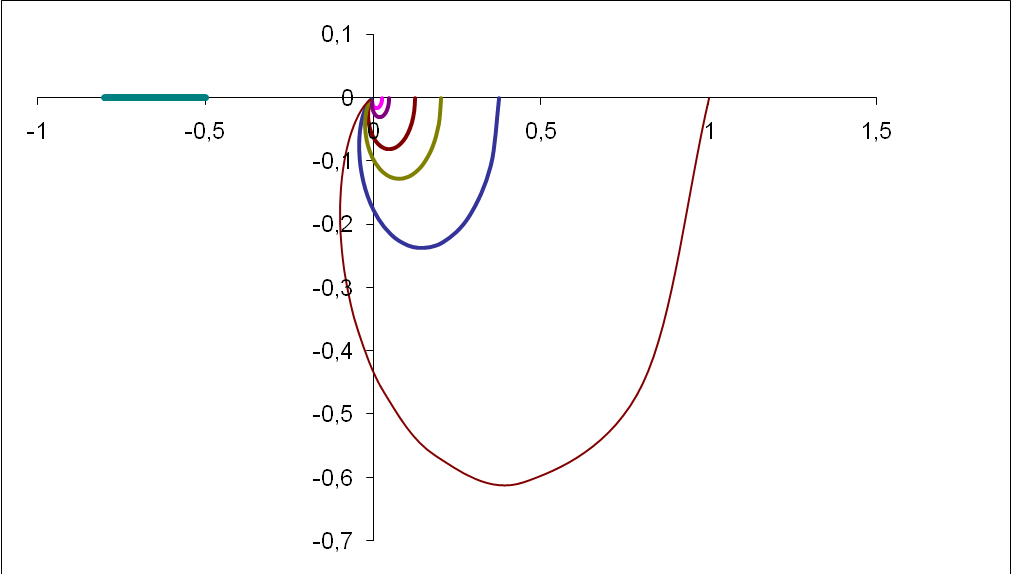
Подставив в выражения (8.7) и (8.8) приведенные в исходных данных значения параметров и, задаваясь различными постоянными значениями показателя затухания На этом же графике нанесем обратную амплитудно-фазовую характеристику нелинейного звена
Рис. 6. Частотные характеристики линейной части системы
Рис. 7. Частотные характеристики линейной части системы и нелинейного звена САУ температуры Как видно из графиков, точка пересечения годографов линейной части системы и нелинейного звена отсутствует. Следовательно, САУ температуры находится в устойчивом равновесном состоянии.
Введение Успешное решение задач автоматизации в настоящее время тесным образом связано с использованием современных технологий теоретических и практических разработок автоматических систем управления. Синтез структуры и определение параметров управляющего устройства выполняются в определенной последовательности по классической схеме. Вначале исследуются свойства управляемого объекта по его характеристикам. Структура и параметры объекта при этом считаются известными, процессы в объекте описываются нелинейными дифференциальными уравнениями. Нелинейность объекта вызвана нелинейностью одного из устройств с типовой нелинейной характеристикой. Определение требуемой структуры управляющего устройства ведется путем итераций от самых простых решений до сложных структур на основе требований технического задания. Из теории линейных систем известно, что монотонный характер переходной характеристики можно получить при плохом быстродействии системы управления.. Для исследования релейных систем высокого порядка на фазовой плоскости используется редуцирование или понижение порядка дифференциального уравнения. Из известных методов редуцирования приводится один, а именно, редуцирование путем приведения исходной системы к каноническому виду. Раздел 1. Основные сведения Решение задачи для следующих исходных данных: -постоянная времени объекта -коэффициент усиления объекта и регулирующего органа k0 =30 град/рад, -коэффициент усиления чувствительного элемента k1=0,25 А-в/град, - коэффициент усиления двигателя k2=2,5 рад/(В*с), -передаточное отношение редуктора i=1000, - коэффициент усиления цепи обратной связи kос=4,5 А-в/рад, -ампер-витки срабатывания реле -максимальное напряжение на выходе релейного усилителя Umax=125 В. Описание САУ Составление уравнений элементов САУ. Для заданной принципиальной схемы составим дифференциальные уравнения звеньев системы. Уравнение регулируемого объекта
где Уравнение чувствительного элемента.
где Уравнение релейного усилителя.
где Уравнение двигателя постоянного тока.
где Уравнение редуктора.
где Уравнение цепи обратной связи
где
|
||||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 546; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.242.56 (0.01 с.) |

 =20 с,
=20 с, =0,7,
=0,7, (1.7)
(1.7) (1.8)
(1.8) (1.9)
(1.9)

 (3.2)
(3.2) (3.3)
(3.3)
 (3.4)
(3.4) (3.5)
(3.5) (3.6)
(3.6) :
: (3.7)
(3.7)
 (3.8)
(3.8)
 (3.9)
(3.9)

 и частоту колебаний
и частоту колебаний  переходного процесса в САУ температуры будет отыскивать путем решения гармонически линеаризованного уравнения.
переходного процесса в САУ температуры будет отыскивать путем решения гармонически линеаризованного уравнения.

 получается из передаточной функции линейной части системы
получается из передаточной функции линейной части системы  подстановкой
подстановкой  а гармонически линеаризованная передаточная функция нелинейного звена
а гармонически линеаризованная передаточная функция нелинейного звена  – подстановкой
– подстановкой  в выражение
в выражение





 как функции от частоты колебаний
как функции от частоты колебаний  при
при  (см. рис 6).
(см. рис 6). при заданных параметрах b и с. Для нелинейной характеристики релейного типа с зоной нечувствительности имеем
при заданных параметрах b и с. Для нелинейной характеристики релейного типа с зоной нечувствительности имеем
 ??????
??????
 (1.1)
(1.1) – фактическое значение температуры объекта,
– фактическое значение температуры объекта,  – угол поворота регулирующего органа.
– угол поворота регулирующего органа. (1.2)
(1.2) – заданное значение температуры объекта,
– заданное значение температуры объекта,  - ошибка рассогласования системы.
- ошибка рассогласования системы. (1.3)
(1.3) – нелинейная функция, заданная статической характеристикой (см.рис.2).
– нелинейная функция, заданная статической характеристикой (см.рис.2). (1.4)
(1.4) - угол поворота вала двигателя.
- угол поворота вала двигателя. (1.5)
(1.5) - коэффициент передачи редуктора.
- коэффициент передачи редуктора. (1.6)
(1.6) - ампер-витки обмотки обратной связи.
- ампер-витки обмотки обратной связи.


