Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Физические основы индуктивных преобразователей. Область их применения.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Индуктивность – это физическая величина, характеризующая магнитные свойства электрической цепи.Ток, текущий впроводящем контуре создает в окружающем пространстве магнитное поле, причем магнитный поток Ф, пронизывающий контур, прямо пропорционален силе тока I: Из приведенного уравнения следует, что изменения индуктивности можно достичь изменением длины l, поперечного сечения S, или магнитной проницаемости μ.При прохождении переменного тока в цепи возникает ЭДС самоиндукции, величина которой зависит от значения индуктивности цепи. Направление этой ЭДС таково, что её действие препятствует изменению величины тока, то есть уменьшает амплитуду тока, а следовательно, и его эффективное значение. Пока индуктивность проводов мала, эта добавочная ЭДС тоже мала, и действие её практически незаметно. ЭДС самоинд-ии зависит от индуктивности контура. Чем больше индуктивность, тем значительнее ЭДС самоиндук и ее влияние на значение тока, значит изменение индуктивности доступно регистрации. Но при наличии большой индуктивности эта добавочная ЭДС может очень значительно влиять на величину переменного тока. Соответственно, легко будет зарегистрировать изменение индуктивности такого контура. Индуктивным датчиком называют устройство для преобразования механических перемещений в электрический сигнал, представляющее собой катушку индуктивности с магнитопроводом и подвижным элементом (якорем), который при изменении линейного или углового размера перемещается и изменяет индуктивность катушки за счет изменения параметров магнитной цепи. Изменение индуктивности происходит в результате изменения зазора между якорем и сердечником (рис. а, в), либо и результате изменения площади их взаимного перекрытия (рис. б, г).
Изменение индуктивности зависит от перемещения якоря и, соответственно, от параметров зазора, нелинейно: Здесь индекс 0 относится к параметрам воздушных зазоров участков магнитной цепи, индекс k относится к ферромагнитным участкам магнитной цепи, соответственно n – число воздушных участков, m – число ферромагнитных участков. Для линеаризации характеристики и увеличения чувствительности применяются дифференциальные индуктивные датчики (рис. в, г).В этом случае при ходе якоря индуктивность одной катушки увеличивается на Δ L, а индуктивность другой уменьшается на Δ L. С помощью мостовой схемы разность изменений индуктивностей может быть преобразована в электрическое напряжение или ток, который вызовет отклонение стрелки на приборе, пропорциональное перемещению измерительного стержня датчика. Еще одним преимуществом дифференциальных схем является то, что многие влияющие факторы одновременно воздействуют на обе катушки и поэтому практически не оказывают влияния на значение измеряемого размера.Следует отметить, что с помощью индуктивных датчиков, как первичных преобразователей измеряются не только геометрические параметры, но и любые другие физические величины, которые могут вызвать малые линейные или угловые перемещения: например, силы, давления, и т.п.Наведение ЭДС индукции в одном проводнике под действием магнитного поля другого проводника, в котором течет переменный ток, называется явлением взаимной индукции:
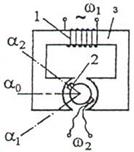
Обмотка 2 поворачивается в кольцевом зазоре магнитной цепи. При крайних положениях рамки ЭДС индукции максимальна, в горизонтальном положении равна нулю. Например, в конструкции датчика поворота сельсина БС-155А обмотка возбуждения ω1 укрепляется в торцевой части статора, в пазах ротора проложены фазные обмотки ω2. Каждому угловому положению ротора соответствует определенное соотношение величин и фаз ЭДС.Если вращение на ротор передается с ходового винта станка с ЧПУ, то снимаемый с обмоток ротора измерительный сигнал является функцией угла поворота, а, следовательно, заданного перемещения. Для регистрации линейных перемещений исполнительных органов станков с ЧПУ применяется линейный индуктосин.
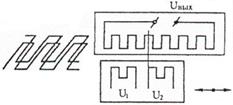
Он состоит из линейки и ползуна с печатными обмотками. С обмотки линейки снимается индуцируемое напряжение Uвых. Ползун имеет две печатные обмотки, сдвинутые на 1/4 шага (сдвиг фазы на 90°). На каждую из обмоток подается переменный ток, причем па 1-й обмотке: U 1 = U 0·sin α зад, а на 2-й: U 2 = U 0·cos α зад , где α зад – заданный угол смещения фаз ЭДС, отражающий заданную величину перемещения рабочего органа. При перемещении ползуна: Uвых = U 0·sin α зад ·cos α ф – U 0·cos α зад ·sin α ф, где α ф – фактический угол смещения, отражающий фактическое перемещение рабочего органа. После преобразований получаем: Uвых = U 0·sin(α зад – α ф). При α зад = α ф Uвых = 0 и подается команда на остановку рабочего органа
|
||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 685; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.209.20 (0.008 с.) |

 Коэффициент L называется индуктивностью контура, ограничивающего поверхность, через который проходит поток Ф, или коэффициентом самоиндукции этого контура. Величина L зависит от размеров и геометрической формы контура, от магнитной проницаемости проводников, образующих цепь, и от свойств окружающей среды. Для создания большой индуктивности проводник свертывают в спираль, называемую катушкой индуктивности, и внутри устанавливают сердечник – магнитопровод из ферромагнитных материалов. Магнитный поток через такой контур определится как
Коэффициент L называется индуктивностью контура, ограничивающего поверхность, через который проходит поток Ф, или коэффициентом самоиндукции этого контура. Величина L зависит от размеров и геометрической формы контура, от магнитной проницаемости проводников, образующих цепь, и от свойств окружающей среды. Для создания большой индуктивности проводник свертывают в спираль, называемую катушкой индуктивности, и внутри устанавливают сердечник – магнитопровод из ферромагнитных материалов. Магнитный поток через такой контур определится как  где B – магнитная индукция внутри контура; S – площадь поперечного сечения магнитной цепи; N – число витков.
где B – магнитная индукция внутри контура; S – площадь поперечного сечения магнитной цепи; N – число витков.  тогда
тогда  то есть
то есть  где l – длина катушки; μ – магнитная проницаемость.
где l – длина катушки; μ – магнитная проницаемость.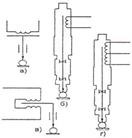
 где Ф 12 – магнитный поток поля тока I 2 через поверхность, ограниченную контуром I 1; L 12 – коэффициент взаимной индукции (взаимоиндуктивность).Рассмотрим индуктивный преобразователь угла поворота.
где Ф 12 – магнитный поток поля тока I 2 через поверхность, ограниченную контуром I 1; L 12 – коэффициент взаимной индукции (взаимоиндуктивность).Рассмотрим индуктивный преобразователь угла поворота.