Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Коэффициент полезного действия подъемной установки и машиныСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Полезная мощность (кВт) для подъема 1 т груза
Полезный расход энергии (кВт ч) за одну подъемную операцию в течении Т (с) на подъем 1 т груза
К. п. д. подъемной установки (без учета потерь в электросети)
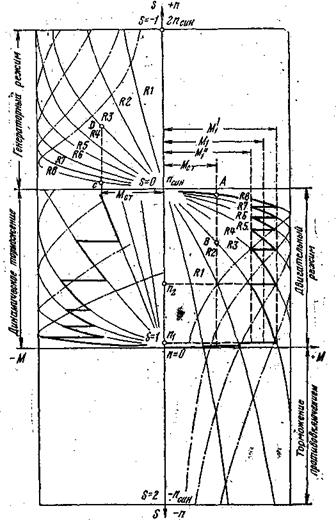
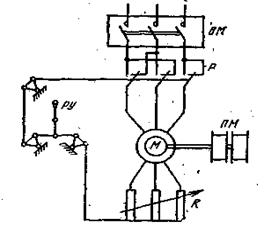
К.п. д. подъемной машины будет больше к. п. д. установки, так как при этом не учитываются сопротивления в стволе, направляющих шкивах, и жесткость каната, т.е. ηмаш = kηв (168) Электропривод. Аппаратура управления и защиты подъёмных установок Асинхронный электропривод На рис. 53 показана принципиальная схема электропривода с асинхронным двигателем, на рис. 54 - диаграмма его механических характеристик — зависимости между вращающим моментом и частотой вращения. Диаграмма имеет четыре области: двигательный режим, генераторный режим (рекуперативное торможение), торможение противовключением, динамическое торможение. Если нагрузка на двигатель больше развиваемого им максимального момента, рабочая точка А (см. рис. 54) переходит на неустойчивую ветвь характеристики, показанную штрихпунктиром; и двигатель останавливается. На неустойчивой части характеристики работать нельзя. При выключенном реостате (ротор замкнут накоротко) частота вращения асинхронного двигателя практически не зависит от нагрузки (жесткая характеристика в виде пологой кривой — естественная характеристика двигателя). При включении реостата зависимость частоты вращения двигателя от нагрузки возрастает (мягкие характеристики в виде крутых кривых).
Рис. 53 - Принципиальная схема электропривода с асинхронным подъемным двигателем: ВМ — масляный выключатель; Р — реверсор; РУ — рукоятка управления; М — подъемный асинхронный двигатель; R - реостат в цепи ротора для регулирования частоты вращения двигателя; ПМ — подъемная машина
Д в и г а т е л ь н ы й р е ж и м. Предположим, что в период пуска двигатель должен развивать вращающий момент М1. При металлическом реостате вращающий момент будет колебаться в заранее выбранных пределах М1" < М1< М1', причем разность предельных значений М1' и М1" определяет число ступеней реостата. В среднем положении рукоятки управления РУ (cм. рис.53) двигатель отключен от сети и в цепь ротора полностью включено сопротивление реостата. В начале подъемной операции машинист выводит рукоятку управления из среднего положения, передвигая ее в определенном направлении; при этом в цепь ротора должно быть включено такое сопротивление R3 (см. рис. 54) реостата, которое способствовало бы получению вращающего момента М1'. Так как М1'>М1, то двигатель, начиная вращение с частотой n1, постепенно ее увеличивает. При этом вращающий момент будет уменьшаться. Это уменьшение следует допустить до М1", что соответствует частоте вращения двигателя n2, после чего необходимо выключить ступень реостата так, чтобы при этой же частоте вращающий момент увеличился от М1" до М1'. Это достигается при сопротивлении реостата R4. В связи с изменением вращающего момента, развиваемого двигателем, ускорение a подъемной системы будет переменным и при органах навивки постоянного радиуса на основании выражения (82):
При преждевременном выключении ступени реостата вращающий момент становится больше М1' и поэтому увеличивается ускорение. Изменяя скорость перемещения рукоятки управления, можно уменьшать или увеличивать продолжительность ускоренного движения. При быстром перемещении рукоятки можно получить недопустимо большое ускорение и, следовательно, перегрузку двигателя. Если при достижении вращающего момента М1" не выключить очередную ступень, т. е. не перейти на сопротивление реостата R4, то он будет уменьшаться до тех пор, пока не сравняется со статическим моментом сопротивления (точка В на рис. 54). Затем вращающий момент двигателя будет следовать за всеми изменениями статического момента сопротивления. Это невыгодно из-за непроизводительной затраты энергии в реостате, тем большей, чем больше сопротивление реостата и продолжительность работы с ним; продолжительность подъемной операции увеличится по сравнению с расчетной, так как частота вращения двигателя меньше номинальной.
Рис. 54 - Диаграмма механических характеристик электропривода c асинхронным двигателем Поэтому, когда с увеличением частоты вращения момент снова достигнет значения М1", выводят следующую ступень и работают при сопротивлении реостата R5. Эти переключения выполняют до тех пор, пока все сопротивление реостата будет выведено из цепи ротора (двигатель работает на самой пологой — естественной характеристике). После выключения всех ступеней реостата вращающий момент двигателя уменьшается до совпадения со статическим моментом сопротивления системы и следует за всеми изменениями его (точка А). Диаграмма скорости подъема в период ускоренного движения выполняется путем вывода в определенные моменты времени из цепи ротора ступеней реостата. Машинист в этот период наблюдает за показанием, амперметра (ток в цепи статора пропорционален вращающему моменту двигателя), стремясь удержать колебание тока в заданных пределах. Управление двигателем в период ускоренного движения может быть автоматизировано. Ступени реостата последовательно автоматически шунтируются, причем продолжительность работы на каждой ступени обеспечивается соответствующей настройкой реле времени. При равномерном движении с максимальной расчетной скоростью движения сосудов все ступени реостата выключены, чему соответствует естественная характеристика двигателя. Если при равномерном движении необходима скорость, меньшая максимальной расчетной, реостат к концу периода ускоренного движения полностью не выключается, причем для поддержания постоянного ее значения при изменяющемся статическом моменте (неуравновешенная подъемная система) приходится переходить на новую характеристику двигателя, обеспечивающую движение с заданной скоростью. Особые трудности в управлении возникают при малых нагрузках, когда для получения скоростей движения, меньших максимальной, приходится работать на характеристиках, при которых малейшее изменение статического момента вызывает значительные изменения частоты вращения двигателя. В этом случае для получения устойчивой скорости движения подъемный двигатель необходимо нагружать, применяя механическое торможение подъемной машины. В период замедленного движения требуется особенно точное соблюдение заданного скоростного режима. Нарушение его ведет к преждевременной остановке, или переподъему. В этот период движения момент сопротивления (усилие) имеет небольшие положительные или отрицательные значения. В первом случае точное соблюдение расчетного режима движения затруднительно, так как двигатель работает при включенном реостате, а нагрузка на него переменна. Кроме того, если при подъеме расчетного груза в период замедления имеют место положительные усилия (двигательный режим), то при меньшей нагрузке могут возникнуть отрицательные усилия, и для соблюдения того же скоростного режима необходимо применять торможение. Поэтому машинисту подъема в зависимости от нагрузки приходится использовать то один, то другой способ управления, что является серьезным недостатком данной подъемной системы. При отрицательном моменте сопротивления (усилии) системы в период замедленного движения работают с применением механического или электрического торможения. Здесь также имеются трудности в управлении, связанные с переменной нагрузкой на машину. Г е н е р а т о р н ы й р е ж и м (рекуперативное торможение) основан на том, что асинхронный двигатель при частоте вращения ротора выше синхронной становится генератором, отдающим энергию в электрическую сеть. Если в двигательном режиме вращающий момент совпадает с направлением движения, то в генераторном режиме он направлен против движения, т. е. становится тормозным моментом. Рекуперативное торможение можно применять в случае, когда опускающийся подъемный сосуд нагружен больше, чем поднимающийся, и при частоте вращения двигателя выше синхронной; при этом максимальная скорость подъема превышает расчетную на 3 — 5 %. В начале замедленного движения двигатель отключается от сети и машину останавливают механическим тормозом. При работе асинхронного двигателя в генераторном режиме (см. рис. 54) тормозной момент двигателя возрастает с увеличением частоты вращения ротора. Введение сопротивления реостата в цепь ротора вызывает чрезмерное увеличение скорости спуска груза; во избежание этого ротор в генераторном режиме замыкается накоротко. Практически рекуперативное торможение осуществляется следующим образом. Машинист оттормаживает машину, которая под действием опускаемого груза приходит в движение. При этом рукоятка управления по мере возрастания скорости перемещается машинистом в направлении движения машины так, чтобы при достижении синхронной частоты вращения ротор двигателя был замкнут накоротко (крайнее положение рукоятки). После того как частота вращения ротора станет больше синхронной, развиваемый двигателем тормозной момент начнет увеличиваться, а ускорение опускаемого груза уменьшаться. Когда тормозное усилие F (или момент М) двигателя станет равным статическому усилию Fст (или моменту Мст). движущейся подъемной системы, то в соответствии с формулой (169) ускорение а системы станет равным нулю, и она будет двигаться с равномерной скоростью, определяемой ординатой точки С (см. рис. 54). Если бы в ротор двигателя было включено сопротивление реостата, соответствующее, например, характеристике R3, то при том же тормозном моменте двигатель работал бы с чрезмерно большой частотой вращения, определяемой ординатой точки D, что недопустимо. Поэтому в генераторном режиме ротор при синхронной частоте вращения автоматически замыкается накоротко. Рекуперативное торможение по сравнению с механическим имеет преимущества, так как при нем тормозной момент, развиваемый двигателем, автоматически приспособляется к движущей силе опускающегося груза, что обеспечивает устойчивое значение скорости движения сосудов; не изнашиваются тормозные колодки; энергия опускаемого груза превращается в электрическую и отдается в сеть. Т о р м о ж е н и е п р о т и в о в к л ю ч е н и е м осуществляется перемещением рукоятки управления в направлении, противоположном движению машины. При этом магнитное поле статора будет вращаться в направлении, противоположном вращению ротора подъемного двигателя, поэтому возникает тормозной по отношению к подъемной системе вращающий момент. В область торможения противовключением попадают устойчивые части механических характеристик при большом сопротивлении реостата в цепи ротора (см. 34). Так как при торможении противовключением только первые две-три ступени реостата обеспечивают устойчивые характеристики двигателя, то регулирование тормозного момента двигателя будет грубым. В связи с грубым регулированием тормозного момента двигателя, необходимостью особой внимательности машиниста при остановке машины, затратой энергии в реостате торможение противовключением не получило широкого распространения. Д и н а м и ч е с к о е т о р м о ж е н и е осуществляется отключением статора от сети переменного тока и питанием его постоянным током при замкнутом накоротко или на пусковой реостат роторе. При этом статор образует неподвижное в пространстве магнитное поле, которое индуктирует во вращающемся роторе переменный ток. Взаимодействие этого тока с магнитным полем статора создает тормозной момент, который можно регулировать изменением величины постоянного тока и сопротивления реостата в цепи ротора. При соединении обмоток статора в звезду постоянный ток подают в две фазы обмоток, а третья свободна. Механические характеристики двигателя при этом торможении (см. рис. 54) по своей форме напоминают характеристики двигательного режима и отличаются от последних тем, что они начинаются в точке, соответствующей неподвижному ротору и величина максимального момента двигателя зависит от изменения постоянного тока в статоре, возрастая при увеличении тока. Если в обмотках статора протекает постоянный ток, равный номинальному переменному току двигателя, то максимальный тормозной момент его будет приблизительно равен номинальному моменту двигателя. Для получения максимального тормозного момента, равного двухкратному номинальному моменту двигателя, необходимо, чтобы величина постоянного тока была примерно в 2 раза больше номинального переменного тока в двигательном режиме. Величина тока в статоре, а следовательно, и тормозной момент ограничиваются допустимым нагревом обмоток. Механические характеристики в режиме динамического торможения (см. рис. 54) имеют такие недостатки: 1) наличие неустойчивой части, на которой работа - двигателя возможна при моменте сопротивления, превышающем максимальный момент двигателя, а также при неправильном управлении во время замедления, когда машинист закорачивает ротор двигателя без выдержки времени; в последнем случае тормозной момент двигателя будет меньше требуемого, а поэтому частота вращения его ротора будет увеличиваться; 2) мягкость характеристик при работе на больших скоростях с большим сопротивлением реостата в цепи ротора. Для устранения этих недостатков необходимо обеспечить увеличение тока возбуждения статора при возрастании тока в роторе, т. е. компенсировать возрастающий магнитный поток ротора. Это производится автоматически в функции частоты вращения ротора. Механические характеристики получаются жесткими и поэтому при изменении нагрузки частота вращения двигателя изменяется в небольших пределах. Динамическое торможение дает возможность получить любое устойчивое значение частоты вращения в пределах от 100 % и примерно до 1 % номинальной, что весьма важно при спуске людей и грузов на пониженных скоростях. Асинхронный двигатель применительно к подъемным установкам должен удовлетворять следующим требованиям: кратность максимального момента по отношению к номинальному не менее 2,0... 2,3; усиленная изоляция обмоток статора и ротора; прочность ротора должна обеспечить возможность увеличения номинальной частоты вращения до 50 %. На подъемных установках применяют асинхронные двигатели серий АК, АКН, ДАФ при напряжении 6 кВ. Применение одиночного асинхронного подъемного двигателя рекомендуется при мощности до 1200 кВт. Это ограничение вызвано затруднениями в изготовлении пускорегулирующей аппаратуры мощных двигателей. При мощности асинхронного привода до 2200 кВт применяют два двигателя, работающие на общий вал подъемной машины. При асинхронном электроприводе затрудняется полная автоматизация работы подъемных. установок из-за мягких характеристик его, когда включены ступени реостата. С развитием силовой полупроводниковой техники совершенствование асинхронного привода идет в направлении применения каскадных схем и частотного регулирования. В системе асинхронно-вентильного каскада (АВК) для плавного регулирования частоты вращения подъемного двигателя в обмотку ротора его вводится противо - з. д. с, согласованная с напряжением ротора по фазе и частоте. Источником противо - э. д. с. является инвертор на тиристорах, который рекуперирует в сеть энергию скольжения ротора при регулировании частоты вращения в двигательном режиме и в режиме динамического торможения. Система АВК обеспечивает плавное регулирование скорости, более экономична по сравнению с релейно-контакторной системой, но имеет более высокую стоимость. При частотном регулировании асинхронного привода частота вращения подъемного двигателя в периоды замедления и дотягивания регулируется изменением частоты тока. Для этой цели используют регулируемые тиристорные преобразователи низкой частоты. Частотное регулирование обеспечивает высокую управляемость, экономичность и надежность асинхронного привода. С применением каскадных схем и частотного регулирования возрастает надежность автоматического управления асинхронным, приводом.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 1107; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.014 с.) |

 (165)
(165) (166)
(166) (167)
(167)
 (169)
(169)