Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Аппараты программированного управления и защитыСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Аппарат задачи и контроля хода АЗК предназначенный для управления подъемными машинами и контроля их работы.
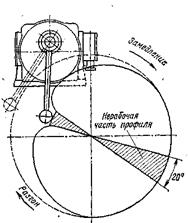
Рис. 74 - Структурная схема АЗК-1: Входной вал; 2 – шкаф с приводом аппарата; 3 и 4 – блоки программирования БМП-1 и БПП-1; 5 – редуктор привода аппарата; 6 – ограничитель скорости ЭОС-2; 7 и 8 – реле контроля вращения РКВ-1; 9 и 10 – блоки сельсиов-датчиков и тахогенераторов; 11 и 12 – блоки этажных выключателей; 13 и 14 – корректирующие устройства; 15 и 16 – редукторы программных устройств; 17 и 18 – программные устройства; 19 – линии связи с указателями глубины контроль фактической скорости во всех периодах движения; преобразовывает вращение вала подъемной машины в электрические импульсы для измерения пути сельсинными указателями глубины; обеспечивает защиту от переподъема; производит корректировку элементов аппарата в соответствии с положением подъемных сосудов в стволе при перестановке барабанов, при проскальзывании канатов относительно многоканатного шкива трения; компенсирует ошибки при вытяжке каната и износе футеровки; контролирует целостность кинематических цепей от подъемной машины и своих собственных. Аппарат имеет симметричную конструкцию с раздельной независимой синхронизацией своих обеих частей. При такой схеме одна часть аппарата в процессе перестановки барабана синхронизируется со «своим» сосудом в стволе, при вытяжке каната и износе футеровки барабана происходит синхронизации каждой части аппарата в отдельности, при многоканатных установках обе части аппарата синхронизируются также раздельно. Аппарат непосредственно причитается к коренному валу машины со стороны или редуктора барабана с помощью передающего вала. Аппарат АЗК-1 (рис. 74) состоит из шкафа с поводом, блока программирования при разъездах на максимальной скорости БПМ-1, блока программирования при разъездах на сниженной скорости БПП-1, двух реле контроля обращение РКВ-1 и электрического ограничителя скорости ЭОС-2. От редуктора привода аппарата обращения передается на валы блоков этажных выключателей, на блоки сельсинов-датчиков и к тахогенераторам контроля обращение. Этажными выключателями подаются импульсы в контролируемых точках пути движения по подъемных сосудов. В каждом блоке имеется 20 этажных выключателей, часть из которых отрабатывает при правом, а часть при левом обращении входного вала АЗК. Этажный выключатель, который сработал, остается включенным и возвращается в исходное положение при обратном направлении обращения входного вала АЗК; каждый этажный выключатель имеет два контакта - замыкающий и размыкающий. В блоке сельсинов-датчиков и тахогенератора имеется два сельсина-датчика, один из которых служит датчиком пути скорости, а другой – для подачи сигналов сельсину-приемнику указателя глубины УГС-4.Тахогенератор подает сигналы на реле контроля целостности АЗК. Корректирующие устройства приводят в соответствие положение механизмов управления А3К и сельсинных указателей глубины с положением сосудов в стволе. Коррекция вырабатывается после установки подъемного сосуда на верхней приемной площадке. Асинхронный двигатель корректора для устранения влияния выбега ротора снабженный электромагнитным тормозом. Нормально двигатель приостановлен. При коррекции его растормаживают, и обращение двигателя передается через систему передач на исходный вал привода АЗК. Блоки программирования осуществляют регулирование ускорения и замедление подъемной машины при разъездах на максимальной (БПМ) и на пониженной (БПП) скоростях. Блоки одинаковые по конструкции и состоят из редуктора и программного устройства. Редуктор передает обращение программному устройству, которое включается электромагнитной муфтой только на периоды ускоренного и замедленного движения сосудов. Программное устройство состоит из двух профилированных дисков, двух сельсинных командоаппаратов и четверых конечных микровыключателей. Один профилированный диск со своим командоаппаратом задает программу при движении вперед, а другой — при движении назад, причем каждый диск профилирован так, что одна его половина задает программу ускорения, а вторая — замедление (рис 75). Программное устройство включается электромагнитной муфтой от импульса этажного ли выключателя от датчика в стволе, а отключается своим конечным микровыключателем. Реле контроля обращение РКВ-1 предназначено для контроля целостности кинематической цепи от вала подъемной машины к валу редуктора программного устройства. При неисправностях этой цепи реле отрабатывает, вызывая предохранительное торможение. Для защиты от превышения скорости в периоды ускоренного, равномерного и замедленного движения в комплексе АЗК примененный электрический ограничитель скорости. На подъемных машинах старых выпусков, не оборудованных аппаратами АЗК, применяют регуляторы подъема (рис 76). Вал 1 такого регулятора приводится в обращении от вала подъемной машины. Через зубчатую 2 и червячную 3 передачи обращения передается на профилированный диск 4 заклиненные барабаны подъемной машины, а через передачи 5, 6 и 7 — на такой же диск 8 переставного барабана. Расцепное устройство 9 разрешает отключить профилированный диск 8 при перестановке барабана. Сельсины-датчики 10 указателя глубины приводятся во вращение непосредственно от червячного вала регулятора, как показано на рис 76, или через ускоряющую передачу. На каждом диске закреплены контролирующие профили 11. Профилированные диски оборачиваются при походке «Вперед» в одном направлении, при походке «Назад» - в противоположном. Положению подъемных сосудов в стволе отвечает определенный угол поворота дисков. От контролирующих профилей приводятся в действие: конечные выключатели подачи импульса на отключение подъемного двигателя в конце замедленного движения; конечные выключатели защиты от переподъема; регуляторы ограничения скорости РОС-5914 (РОС-5912) для защиты от превышения заданной скорости при равномерном движении и замедлении; сельсинный командоаппарат автоматического управления, являющийся датчиком заданной скорости в период замедления (при асинхронном приводе); сельсинные командоаппараты программного регулирования хода (при двигателях постоянного тока).
Рис. 76 - Схема регулятора подъема Рис. 77 - Цепь защиты
Регулятор подъема снабженный блокированием включение и отключение расцепного устройства профилированного диска переставного барабана. Аппараты защиты необходимые для предотвращения аварий подъемных остановок. Эти аппараты, в случае недопустимых отклонений контролируемых ними параметров от заданных значений, вводят в предохранительный тормоз с одновременным отключением подъемного двигателя. Включение предохранительного тормоза при этом осуществляется разрывом цепи тормозного электромагнита, а отключение двигателя — разрывом цепи реверсора при асинхронном приводе главной якорной цепи в системе Г-Д. Разрыв указанных цепей производится контактами контактора предохранительного тормоза. Цепь указанного контактора с последовательно включенными контактами разных защитных аппаратов называется цепью защиты подъемной установки. На рис. 77 показанная цепь защиты с контактором предохранительного тормоза КТП и связь ее с цепью реверсирующих контакторов В и Н (соответственно ход «Вперед и «Назад») и с цепью тормозного электромагнита ТП. Для упрощения в этой цепи показанная только часть контактов аппаратов защиты, а другие виды защиты условно показаны одним контактом Р, причем названия и значение этих видов защит будут указаны ниже. Последовательно с катушкой контактора КТП предохранительного торможения включенный: резистор R1, что вводится при включении катушки КТП ее блоком-контактом (такие сопротивления применяются при могущественных контакторах); контакт КА-0 командоаппарата, замкнутый в нейтральном положении последнего, предназначенный для блокирования, которое выключает растормаживания машины предохранительным тормозом при невозвращенной рукоятке управления двигателем в среднее положение последействия предохранительного тормоза и шунтируемый блоком-контактом КТП при выводе рукоятки управление из нейтрального положения; контакты РП1, ВК1, РП2 и ВК2 бесконтактных и механических конечных выключателей, установленных на копре и в аппарате задачи и контроля хода для каждого подъемного сосуда размыкающиеся при переподъеме сосудов; ПК1 и ПК2 выключателей защиты от провисания канатов; контакты ПО1 и ПО2 обходных переключателей, шунтирующие контакты РП1, ВК1, РП2, ВК2, ПК1, ПК2 для восстановления цепи защиты при ликвидации переподъема и напуска каната, причем блоки-контакты ПО3 и ПО4 обходных переключателей включенные в цепь реверсирующих контакторов В и Н для блокирования, которое выключает движение машины в сторону усиление переподъема, а также включение подъемного двигателя после ликвидации переподъема при невозвращенном в исходное положение обходном переключателе; аварийная кнопка АК — для разрыва цепи защиты машинистом. На схеме показанные плавкие предохранители Пр1... Пр5. Подъемная система снабжена также следующими видами защит: от превышения максимальной скорости, обеспечиваемая двумя независимыми ограничителями скорости; от обрыва цепей электрического ограничителя скорости; от недопустимого износа тормозных колодок; от превышения вдвое против расчетного периода разгона и замедление; от снижения давления в цилиндрах рабочего и предохранительного тормозов; от обратного хода машины, если в автоматическом режиме она пойдет в сторону, от противоположную полученной команде; от неполное растормаживание машины рабочим тормозом; от случайного выхода из зацепления муфты механизма перестановки барабанов; от недопустимой перегрузки одного из двигателей при двухдвигательном приводе; от повреждения затвора дозатора при его случайном открывании во время движения скипов; от включения машины в ремонтах; от работы в автоматическом режиме одним двигателем; максимальной гуменной защитой подъемного двигателя, источников постоянный и переменный тока; нулевой защитой подъемного двигателя. При разрыве цепи контактом Р любой из указанных защит контактор КТП обесточивается и разрывает свои контакты в цепи реверсирующих контактов В и Н и в цепи электромагнита ТП предохранительного тормоза. В схемах управления подъемными установками предусмотрены защитные блокирования: обеспечивающая выдержку времени при переключениях реверсирующих контактов В и Н и контактора динамического торможения (дуговое блокирование); отключающая масляные выключатели при открывании ограждения ячеек разъединителей и реверсора высоковольтного распредустройства; исключающая возможность снятия предохранительного тормоза, если машина не заторможена рабочим тормозом и рукоятка управления двигателем находятся не в нулевом положении; препятствующая включению приводного двигателя при наложенном предохранительном тормозе; не допускающая
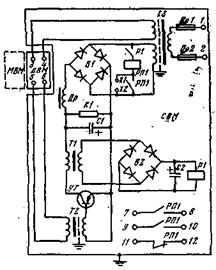
Рис.78 - Конечный выключатель ВМ
включение двигателя при закороченном роторе; обеспечивающая последовательное включение контакторов ускорения; не допускающая снятие предохранительного тормоза, если переставной барабан находится в неполном зацеплении с заклиненной; препятствующая работе подъема при открытом затворе дозатора. Предусмотренные также блокирования, которые обеспечивают надежную работу устройств и цепей сигнализации. Конечные выключатели, которые служат для предотвращения переподъема сосудов, бывают контактные и бесконтактные. Контактные выключатели устанавливают в аппарате задачи и контроля хода, а контакты их включены непосредственно в цепь защиты. Бесконтактные конечные выключатели устанавливают на копре. Наибольшее применение получили магнитные выключатели ВМ. Бесконтактные магнитные конечные выключатели ВМ (рис. 78) состоят из постоянного магнита МВМ, закрепленного на подъемном сосуде, датчика ДВМ на копре и станции управления СВМ, расположенной в дома подъемной машины. Датчик ДВМ представляет собой чувствительный элемент, который реагирует на смену внешнего магнитного поля. Цепь датчика искробезопасна. Станция СВМ есть транзисторным усилителем переменного тока, на выходе которого включенное электромагнитное реле. Контакт этого реле находится в цепи защиты. При подаче питания на зажимы 1 и 2 трансформаторы Т3 появляется напряжение на зажимах 3 и 4 датчики ДВМ. Датчик из зажимов 5 и 6 выдает исходный сигнал, который через трансформатор Т2, транзисторный усилитель УТ и трансформатор.Т1 поступает на выпрямитель В2 и потом на промежуточное реле Р1. Последнее замкнет контакт Р1 в цени реле РП1, что, в свою очередь, запрет контакт РП1 (зажимы 7-8) в цепи защиты. При прохождении магнита МВМ близ датчика ДВМ исходный сигнал последнего снижается к величине, меньшей порога чувствительности усилителя УТ. Ток в реле Р1 снижается к нулю, отчего, разомкнется контакт Р1 в цепи реле РП1. В связи с этим контакт РП1 в цепи защиты разомкнется. Контакты РП1 (зажимы 7-8, 9-10, 11-12) и перемычка Х1 — Х2 позволяют расширить область применения выключателя при автоматизации подъемных установок. На рис. 78 также показанные: В1 — выпрямитель, что питает транзисторный усилитель УТ; R1 — резистор, который создает постоянную погрузку на выпрямитель В2; ДР — дроссель и конденсатор С1, что образуют фильтр сглаживания пульсации в цепи транзисторного усилителя УТ; для этот же целей предназначенный конденсатор С2; Пр1 и Пр2 — плавкие предохранители. Высокочастотные бесконтактные выключатели ВБВ работают на принципе срыва колебаний генератора высокой частоты путем экранирования его контура. Экраном есть корпус подъемной ли сосуда специальная металлическая пластина, закрепленная на нем. При приближении металлической массы к датчику на расстояние 80... 100 мм колебание в генераторе срываются в связи с изменением условий генерации, и исполнительное реле, обесточив, своими контактами вызывает включение предохранительного тормоза и отключения подъемного двигателя. Конечные выключатели являются надежной защитой от переподъема при определенных предельных скоростях сосуда, поэтому по ПБ при максимальной скорости выше 3 м/с для действующих и выше 2 м/с для снова монтируемых подъемов применяют аппараты контроля скорости подхода сосудов к приемным площадкам. Ограничители скорости необходимые для того, чтобы не допускать превышения максимальной скорости более 15 % по сравнению с расчетной и подхода подъемного сосуда к верхней приемной площадке со скоростью более 1,5 м/с при транспортировании грузов 1 м/с при спуске – подъеме людей. Ограничители скорости основанные на принципе сравнения с заданной соответствующей действительности скоростей подъема.
В электрическом ограничители скорости с аппаратами РОС (рис. 79, а) примененный тахометрический генератор ТГ постоянного тока с независимой обмоткой возбуждения ОВ, что оборачивается от подъемного двигателя ПД. Этот генератор есть источником сигналов соответствующей действительности скорости подъема. Во внешней цепи генератора ТГ включенные реле контроля скорости РКС, реле исправности этой цепи РКЦ, нерегулируемый резистор R3, реостаты R1 и R2 соответственно для хода «Вперед» и «Назад» и вентили В1 и В2, необходимые для поочередного включения реостатов R1 и R2.
Рис. 79 - Электрические ограничители скорости с аппаратами РОС Сопротивление реостатов R1 и R2 в зависимости от пройденного сосудами пути изменяется в период замедленного движения с помощью контролирующего профиля на профилированном диске. Изменение сопротивления реостатов R1 и R2 необходимо для поддержки за весь период движения сосудов постоянного по величине тока в внешней цепи генератора ТГ при условии соблюдения расчетной диаграммы скорости. При максимальной скорости подъема в катушке реле РКС протекает ток, величина которого устанавливается номинальной э.д.с. тахогенератора ТГ и суммарным сопротивлением его якоря, катушек реле РКЦ и РКС, резистора R3 и целиком введенным сопротивлением реостата R1 ли R2. При превышении установленной максимальной скорости на 15 % в связи с увеличением э.д.с. генератора, а итак, и тока в его цепи, реле РКС разрывает свой контакт в цепи контактора КТП (цепь защиты), машина затормаживается предохранительным тормозом, а двигатель ПД отключается от сети. В период замедленного движения происходит пропорционально движения скорости уменьшение э.д.с. генератора ТГ, но одновременно профилированный диск, действуя на ползунок реостата R1 (R2) поддерживается приблизительно постоянной и меньше тока втягивания сердечника реле РКС. При недопустимом превышении скорости ток в цепи реле РКС увеличивается и контакт его разрывает цепь защиты. Если скорость транспортирования груза больше скорости спуска – подъема людей, то последняя контролируется с помощью реле человеческой скорости (на рис. 79, а не показан), включенного последовательно с реле РКС, но настроенного на меньший ток, чем реле РКС. Контакт реле человеческой скорости в цепи защиты при подаче сигнала о транспортировании груза шунтируется. При замедлении чувствительность ограничителя скорости уменьшается, так как при низкой скорости не достигается точное ее регулирование, и ограничитель может сработать. Поэтому по мере уменьшения скорости сопротивление реостата R1 (R2) уменьшается так, чтобы в цепи генератора ТГ стал несколько меньше по сравнению с током при равномерном движении. Невыключаемый резистор R3 необходим для уменьшения нечувствительности схемы при малой скорости (дотягивание сосуда), когда уже все сопротивление R1 (R2) выведено. При неисправности ограничителя скорости контакт реле РКЦ в цепи защиты остается разомкнутым, то есть происходит предохранительное торможение. При остановленной машине контакт реле РКЦ шунтируется контактом К8 контактора последней ступени роторного сопротивления двигателя ПД. Для того чтобы реле РКС, контролируя скорость только во время равномерного хода и замедления, не отрабатывало в период ускорения, катушка его шунтирована блоком-контактором БК1 реверсора и блока-контактора БК2 реостаты R1 (R2). При пуске машины катушка реле РКС зашунтирована контактами БК1 и БК2. В начале равномерного хода машины блок-контакт БК2 размыкается, в начале замедления он замыкается, а контакт БК1 размыкается. Автоматизированные подъемные установки, согласно ПТЭ, должны иметь дублирующие ограничители скорости; один из них с независимым приводом, а второй от регулятора подъема. Дублирующие ограничители скорости при применении аппаратов РОС (рис. 79,б) осуществляют взаимоконтроль исправности своих цепей с помощью двухобмоточного реле РКЦ. При неисправности любой из задублированных цепей, нарушении кинематических связей с тахогенераторами ТГ1 ли ТГ2, поломке любого из реостатов R1 … R4 реле РКЦ срабатывает, вызывая предохранительное торможение. Тахогенератор ТГ1 приводится от вала машины, а ТГ2 — от регулятора подъема.. На рис. 80 показанная структурная схема электрического ограничителя скорости ЭОС-2, применяемого в комплекте с аппаратом АЗК. Вращение от вала подъемной машины 1 передается на две симметричных части редуктора 2 аппараты АЗК, от которого осуществляется привод сельсинов-датчиков 3 и 4 указателей глубины, тахогенераторов 5 и 6, путевых выключателей 7. На выходы тахогенераторов 5 и 6 включенные реле контроля обращение 8 и 9 Передаточное отношение редуктора 2 обеспечивает поворот роторов сельсинов-датчиков на 50...70° за период разгона подъемной машины. Вблизи от приемных площадок, где ограничитель скорости контролирует минимальную скорость, напряжение на зажимах обмоток синхронизации; сельсинов должно быть близкой к нулю. По мере удаления сосудов от приемных площадок это напряжение растет пропорционально контролируемой скорости. Исходное напряжение сельсина-датчика моделируется диодно-функциональными преобразователями 10 и 11, что осуществляют задачу скорости по необходимому закону и изменение величины, которая задается, в необходимых границах. Исходное напряжение преобразователей 10 и 11 подается на блоки сравнения 12 и 13. На блоки сравнения подается также напряжение от тахогенераторов 12 и 13, пропорциональное действительной скорости. При превышении этой скорости над заданной в блоках 12 и 13 исчезает сигнал, который поступает на вход исполнительных блоков 10 и 11, отчего исходное реле размыкает свой контакт в цепи защиты. Блок 18 контролирует исправность функциональных блоков 10 и 11, а блок 19 предназначен для периодической проверки исправности каналов.
Рис. 80 - Структурная схема электрического ограничителя скорости ЭОС-2
Когда один из подъемных сосудов находится вблизи приемной площадки, напряжение в обмотке синхронизации соответствующего сельсина (например 3) близко к нулю, нарушение другого его сельсина 4 отключен дорожным выключателем 7. Величина контролируемой скорости определяется напряжением согласующего элемента блока моделирования, который согласует, моделирование, пропорциональным минимальным значением на зажимах обмотки синхронизированного сельсина-датчика 3 растет пропорционально контролируемой скорости и при повороте ротора его на 50...70°дорожный выключатель отключит нарушение сельсина в момент окончания ускоренного движения и включит на вход блока моделирование постоянное напряжение уставки 20, что отвечает задаче максимальной скорости. В начале замедления дорожный выключатель отключит постоянное напряжение и включит обмотку возбуждения сельсина-датчика4, ротор которого в этой точке выставленный на угол 50...70.° В меру приближения сосуда к приемной площадке напряжение на зажимах обмотки синхронизации сельсина 4 снижается пропорционально контролируемой скорости и близ площадки встанет близким к нулю, который отвечает минимальной контролируемой скорости. При обратном движении сосудов работа устройства аналогична. Схема управления
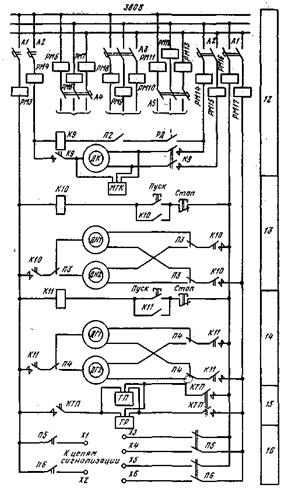
Управление подъемными установками может быть автоматическое, полуавтоматическое, дистанционное, местное. В автоматическом режиме управления осуществляется без участия машиниста подъема (оператора); при полуавтоматическом управлении машинист дает команду на начало подъемного цикла и иногда — на выполнение некоторых заключительных операций, все другие операции выполняются без его участия; дистанционное управление осуществляется из пульта, установленного на приемной площадке, с ли клети (лифтовое управление); местное управление вырабатывается машинистом подъема. Автоматизация клетевых установок по сравнению с скиповыми представляет более сложную задачу вследствие разнообразия режимов работы, широкого изменения погрузки, необходимости маневров у приемных площадок и т.д. Поэтому при автоматизации клетевых установок не предполагается устранение машиниста, а относится цель повышения безопасности и надежность работы подъема, улучшение условий работы машиниста. Полная автоматизация предусматривает автоматическое выполнение всех периодов диаграммы скорости. Выбор метода автоматизации в отдельные периоды диаграммы скорости определяется, главным образом, диаграммой усилий. В период разгона при положительных усилиях нужно двигательный режим работы привода. Система автоматического управления должна обеспечивать заданный закон изменения скорости подъемных сосудов. При асинхронных двигателях с металлическим реостатом в цепи ротора из разных способов автоматизации периода ускоренного движения наибольшее применение имеет пуск по току с дополнительной выдержкой за временем. Равномерное движение при работе двигателя на естественной характеристике обеспечивается без использования средств автоматики, однако в тормозном режиме при спуске груза и в период равномерного движения нужно использования автоматических устройств. Наиболее трудным для автоматизации есть период замедления и дотягивания, что объясняется необходимостью точного подхода сосудов к конечным пунктам пути, значительными изменениями погрузки, а также мягкостью искусственных характеристик асинхронного привода. При положительных усилиях в период замедления применяется двигательный режим, при отрицательных — тормозной. Наибольшую сложность представляет автоматизация замедления при отрицательных усилиях. Торможение при асинхронном приводе может быть электродинамическое, с помощью токов сниженной частоты, механическое (тормозом), рекуперативное динамическое с применением каскадных схем. Автоматическое управление в периоды замедления и дотягивания требует применение сложных устройств автоматизации. Привод постоянного тока в сравнении с асинхронным имеет лучшие регулировочные свойства благодаря твердым характеристикам двигателя. Автоматическое управление поводом постоянного тока может осуществляться одними и теми же средствами во все периоды диаграммы скорости как при положительных, так и при отрицательных усилиях. Взаимосвязь привода, аппаратов управления и защиты устанавливается по схеме управления подъемной машиной. Одна из таких схем управления подъемной установкой с асинхронным поводом и с автоматизацией периода ускоренного движения показанная на рис. 81. Для облегчения чтения схемы выделенные следующие цепи. Цепь (1) высоковольтного распределительного устройства, в которую входят два разъединителя Р1 и Р2 рабочего и резервного высоковольтных кабелей, масляный выключатель ВМ с трансформаторами тока ТТ1... ТТ4 и трансформатором напряжения ТН. От трансформаторов ТТ1... ТТ4 питаются катушки максимальных реле РМ1 и РМ2 выключатели ВМ, гуменное реле ускорения РТУ и амперметр А. От трансформатора ТН питаются нулевая катушка НК выключателя ВМ, вольтметр В, зеленая ЛЗ и красная ЛК сигнальные лампы, которые указывают соответственно на выключение и включение выключателя ВМ. В цепи катушки НК имеется контакт АК ножной аварийной кнопки и контакт БР блокирование, которое отключает выключатель ВМ при открывании двери реверсора. Силовая цепь (2) подъемного двигателя ПД состоит из контактов В («Вперед») и Н («Назад») реверсора. В цепь ротора двигателя ПД включенные ящики сопротивления R, ступени которого шунтируются с помощью контактов К1 — К8 контакторов ускорения. Цепь (3) источников постоянного тока с переключателем П1 — генераторы Г1 и Г2 с обмотками возбуждения 0ВГ1 и 0ВГ2 и установочными резисторами R13 и R15. От источника постоянного тока питаются цепи: (4) — защиты-контактора КТП; (5) — катушек В и Н контакторов реверсора с контактами командоаппарата КА2 и КА3; (6) — катушек К1 —К8 контакторов ускорения с контактами командоаппарата КА4 — КА8; (7) — реле РДБ дуговой блокировки; (8) — катушек РУ1 — РУ8 реле времени; (9) — катушки реле РШ, необходимого для шунтирования в цепи защиты в период разгона машины контакта РКЦ реле контроля цепи электрического ограничителя скорости, с контактами БК1 и БК2, управляемыми от рычага электрического ограничителя скорости; (10) — обмотки возбуждения ОВТГ тахогенератора ТГ электрического ограничителя скорости, в цепи которого последовательно включенные реле РЛС, которое контролирует скорость при транспортировании людей, реле РКЦ контроля цепи электрического ограничителя скорости, реле РКС, которое контролирует скорость при транспортировании груза, и реостаты R16 и R17 реле ограничения скорости; (11) — катушки реле РП с контактами тепловых реле ТР контроля температуры подшипников. От шин переменного тока низкого напряжения 380 В с рабочим А4 и резервным А5 введениями от трансформаторов собственных нужд; через автоматы А1 и А2 получают питание цепи: (12) — двигателя ДК тормозного компрессора с автоматическим контакторным пуском с помощью реле давления РД и электромагнитом МТК запорно-разгрузочного клапана, который разгружает компрессор при его пуске; (13) — двигателей ДН1 и ДН2 маслонасосов смазывание (рабочего и резервного) с контакторным пуском с помощью кнопок; (14) — двигателей ДГ1 и ДГ2 генераторов постоянного тока Г1 и Г2 с контакторным пуском с помощью кнопок; (15) — электромагнитов ТР и ТП соответственно рабочего и предохранительного тормозов с включением от контактора цепи защиты КТП; (16) — сигнализации; автомат А3 есть резервной. В цепи защиты (4) — контактора КТП предохранительного тормоза имеются следующие контакты: КА1 — контакт, замкнутый в нулевом положении рукоятки управление командоаппаратом КА; К8 — контактора последней ступени ускорения (6);. РКЦ — реле контроля цепей электрического ограничителя скорости (10); РШ — шунтирующего реле (9); ПГЛ — переключателя «Груз-люди», замкнутый только при транспортировании груза; РЛС — реле контроля скорости при транспортировании людей (10); РКС — реле контроля скорости при транспортировании грузов (10); ВМ — масляного выключателя (1); РП1 и РП2, ВК1 и ВК2 — защиты от переподъема соответственно бесконтактных выключателей на копре и конечных выключателях, установленному в АЗК (на схеме не показанные); П01 и П02 — обходного переключателя защиты от переподъема; КД — реле, что контролирует давление в цилиндре предохранительного тормоза; ВБТП — блокировочного выключателя предохранительного тормоза. При подготовке схемы к работе включаются разъединители Р1 ли Р2 и выключатель ВМ, автоматы А1, А2, А4, А5, выключатель П2 двигатели ДК, тормозного компрессора, переключатель П3 и кнопка «Пуск» двигателей маслонасосов смазывание, переключатель П4 и кнопка «Пуск» двигателей ДГ1 ли ДГ2, выключатели П5 и П6 в цепях сигнализации, переключатель П1 в цепи (3); при включении последнего переключателя реле времени РУ1... РУ8 обтекаются током и размыкают свои контакты в цепях катушек контакторов К1... К8. Рукоятку обходного переключателя ПО защиты от переподъема устанавливают у положения, при котором его контакты П01 и П02 разомкнутые (4), а П03 и П04 — замкнутые (5). Рукоятку командоаппарата КА ставят в нулевое положение, рукоятку рабочего тормоза — у положения «Приостановлено», с помощью кнопки снимается предохранительный тормоз. При этом в цепи защиты замыкается контакт ВБТП и катушка контактора КТП обтекается током, включаются ее контакты КТП в цепях (4), (5), (6) и (15). При включении контактора КТП контактом КТП вводится в цепь катушки резистор R2 (применяется при могущественных контакторах), другим ее контактом шунтируется контакт КА1, что разрешает передвигать рукоятку командоаппарата, КА без разрыва цепи защиты. Пуск машины возможный только после получения исполнительного сигнала. При подаче этого сигнала замыкается контакт КИС (6) в цепи катушек реверсора В и Н. При пуске машины машинист передвигает рукоятку рабочего тормоза у положения «Расторможено», а рукоятку командоаппарата КА — в соответствующее крайнее положение. При перемещении рукоятки командоаппарата в направления, например, «Вперед» замыкаются его контакты КА2, КА4... КА8. Катушка реверсора В обтекается током и ее контакты В запрутся в силовой цепи, благодаря чему к обмотке статора двигателя ПД будет подведенное напряжение. При замыкании блока-контакта В в цепи катушки реле дуговой блокировки РДБ разомкнется контакт РДБ в цепи катушки реле РУ1. Реле РУ1 с выдержкой времени запрет свой контакт РУ1 в цепи катушки контактора К1, и последний своими контактами К1 зашунтирует первую ступень сопротивления в цепи ротора двигателя ПД: замыкающий блок-контакт К1 в цепи катушек реле РУ1... РУ8 запрется, а контакт, который размыкает, К1 разомкнется. Реле РУ2 при включении контактора К1 обесточивается и с выдержкой времени замыкает свой контакт в цепи катушки контактора К2. Контактор К2 шунтирует другу степень сопротивления в цепи ротора двигателя ПД и своим замыкающим блоком-контактом подготовит цепь питания катушки реле РУ3 через контакт реле РТУ и т.д. к полному выключению сопротивления из цепи ротора двигателя ПД. Если при шунтировании, например, второй ступени сопротивления толчок тока в статоре выходит большим, то отрабатывает реле гуменное ускорение РТУ и замыкает свой контакт в цепи реле РУ3 и держит его замкнутым до тех пор, пока ток в статоре по мере увеличения частоты обращения ротора не снизится к величине, при которой реле РТУ разомкнет свой контакт в цепи реле РУ3. В начале замедленного движения подъемной машины машинист переставляет рычаг управления двигателем в среднее положение и подтормаживает машину рабочим тормозом. Если подъемные сосуды подойдут к приемным площадкам, машина затормаживается.
Рис. 81. Схема управления подъемной установкой с асинхронным поводом и с автоматизацией периода ускоренного движения
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 1270; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.014 с.) |

 Аппарат выполняет следующие функции: выдает импульсы в контролируемых точках пути движения подъемных сосудов для соответствующих переключений в схеме автоматического управления; задает программу хода подъемной машины на максимальной и пониженной скоростях; осуществляет
Аппарат выполняет следующие функции: выдает импульсы в контролируемых точках пути движения подъемных сосудов для соответствующих переключений в схеме автоматического управления; задает программу хода подъемной машины на максимальной и пониженной скоростях; осуществляет