Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сравнение функциональных характеристик человека и машиныСодержание книги
Поиск на нашем сайте
Человек в системах «человек—машина» может выполнять различные функции. Он может выступать в роли приемника осведомительной информации, поступающей в той или иной форме от управляемого объекта, в роли ретранслятора, передающего информацию от одного звена к другому, может осуществлять анализ информации и принимать решения; выполнять функцию программирования работы всей системы или ее частей; осущест-влять наблюдение и контроль за работой системы. Оператор может быть исполнителем той или иной команды, т. е. выполнять действия, непосред-ственно направленные на преобразования управляемого объекта. Человек, как правило, совмещает ряд функций, выполняя их последовательно или одновременно, являясь звеном системы и субъектом управления. Если выполняемая работа в силу требований высокого ритма, скорости, точности тяжела для человека, лучше в целях безопасности труда заменить человека машиной. Человек управляет объектом. Будет ли это диспетчер электростанции, авиадиспетчер или машинист — во всех случаях процесс управления имеет некоторые общие черты. Все изменения управляемого объекта улавливаются с помощью каких-либо датчиков; сигналы от датчиков преобразуются и подаются к приборам, за которыми наблюдает человек. Он воспринимает показания приборов, расшифровывает их, принимает решение, выполняет соответствующее действие, которое может быть простым и сложным. Сигнал, возникающий в результате действия человека, преобразуется и поступает к управляемому объекту, изменяя его состояние. Новое состояние объекта вызывает изменение показаний прибора, которое информирует человека о результатах его действия. Это, в свою очередь, потребует от него новых действий и т.д.
5.1.3. Надежность работы и ошибки человека при взаимодействии с техническими системами. Надежность работы человека определяется как вероятность успешного выполнения им работы или поставленной задачи на заданном этапе функционирования системы в течение заданного интервала времени при определенных требованиях к продолжительности выполнения работы. Ошибка человека определяется как невыполнение поставленной задачи (или выполнение запрещенного действия), которое может явиться причиной повреждения оборудования или имущества либо нарушения нормального хода запланированных операций. В реальных условиях в большинстве систем независимо от степени их автоматизации требуется в той или иной мере участие человека. Можно утверждать, что там, где работает человек, появляются ошибки. Они возникают независимо от уровня подготовки, квалификации или опыта. Поэтому прогнозирование надежности оборудования без учета надежности работы человека не может дать истинной картины. Ошибки по вине человека могут возникнуть в тех случаях, когда: 1) оператор (или какое-либо лицо) стремится к достижению ошибочной цели; 2) поставленная цель не может быть достигнута из-за неправильных действий оператора; 3) оператор бездействует в тот момент, когда его участие необходимо. Виды ошибок, допускаемых человеком на различных стадиях взаимодей-ствия в системе «человек — машина», можно классифицировать следующим образом. 1. Ошибки проектирования обусловлены неудовлетворительным качеством проектирования. Например, управляющие устройства и индикаторы могут быть расположены настолько далеко друг от друга, что оператор будет испытывать затруднения при одновременном пользовании ими. 2. Операторские ошибки возникают при неправильном выполнении 3. Ошибки изготовления имеют место на этапе производства вследствие: а) неудовлетворительного качества работы, например неправильной сварки; б) неправильного выбора материала; в) изготовления изделия с отклонениями от конструкторской документации. 4. Ошибки технического обслуживания возникают в процессе эксплуатации и обычно вызваны некачественным ремонтом оборудования или 5. Внесенные ошибки, как правило, это ошибки, для которых трудно 6. Ошибки контроля связаны с ошибочной приемкой как годного элемента или устройства, характеристики которого выходят за пределы допусков, либо с ошибочной отбраковкой годного устройства или элемента с характеристиками в пределах допусков. 7. Ошибки обращения возникают вследствие неудовлетворительного 8. Ошибки организации рабочего места: теснота рабочего помещения, повышенная температура, шум, недостаточная освещенность и т. п. 9. Ошибки управления коллективом, не позволяющие достигнуть оптимального качества работы: недостаточное стимулирование специалистов, их психологическая несовместимость. Свойство человека ошибаться является функцией его психофизиологического состояния. Интенсивность ошибок во многом определяется параметрами внешней среды, в которой человек работает. Ошибки человека можно распределить по трем уровням (рис. 5.3), и на каждом уровне возможно предусмотрение ошибок.
Рис. 5.3. Категории ошибок человека Прогнозирование ошибок человека. Методы прогнозирования частоты ошибок человека основываются на классическом анализе и включают следую-щие этапы: — составление перечня основных отказов системы; — составление перечня и анализ действий человека; — оценивание частоты ошибок человека; — определение влияния частоты ошибок человека на интенсивность — выработка рекомендаций, внесение необходимых изменений в рассматриваемую систему и вычисление новых значений интенсивности отказов. Одним из основных методов анализа надежности работы человека является построение дерева вероятностей. При использовании этого метода задается некоторая условная вероятность успешного или ошибочного выполнения человеком каждой важной операции либо вероятность появления соответст-вующего события. Исход каждого события изображается ветвями дерева веро-ятностей. Полная вероятность успешного выполнения определенной операции находится суммированием соответствующих вероятностей в конечной точке пути успешных исходов на диаграмме дерева вероятностей. Этот метод с некоторыми уточнениями может учитывать такие факторы, как стресс, вызываемый нехваткой времени; эмоциональная нагрузка; нагруз-ка, определяемая необходимостью ответных действий, результатами взаимо-действий и отказами оборудования. Следует заметить, что данный метод обеспечивает хорошую наглядность, а связанные с ним математические вычисления просты, что в свою очередь снижает вероятность появления вычислительных ошибок. Кроме того, он позволяет специалисту по инженерной психологии легко оценить условную вероятность, которую в противном случае можно получить только с помощью решения сложных вероятностных уравнений. Пример. Оператор выполняет два задания — сначала х, а затем у. При этом он может выполнять их как правильно, так и неправильно. Другими словами, неправильно выполняемые задания — единственные ошибки, которые могут появляться в данной ситуации. Требуется построить дерево возможных исходов и найти общую вероятность неправильного выполнения задания. Предполагается, что вероятности статистически независимы. Для решения поставленной задачи воспользуемся деревом возможных исходов, изображенным на рис. 5.4 и введем следующие обозначения: Ps — вероятность успешного выполнения задания; Pf — вероятность невыполнения задания; s — успешное выполнение задания; f — невыполнение задания; Psx — вероятность успешного выполнения задания х; Psy — вероятность успешного выполнения задания у; Pfx — вероятность невыполнения задания х; Pfy — вероятность невыполнения задания у.
Рис.15.4. Схема дерева исходов
Согласно рис. 5.4, вероятность успешного выполнения задания равна P s = Psx • Psy Аналогично находится выражение для вероятности невыполнения задания: Pf = Pfx• Pfy = 1 - Psx•Psy Из рис. 5.4 следует, что единственным способом успешного выполнения системного задания является успешное выполнение обоих заданий х и у. Именно поэтому вероятность правильного выполнения системного задания определяется как Psx – Psy. Для оценки надежности работы операторов технических систем необходимо учитывать следующие факторы: — качество обучения и практической подготовки; — наличие письменных инструкций, их качество и возможность не пра-вильного их толкования; — эргономические показатели рабочих мест; — степень независимости действий оператора; — наличие операторов-дублеров; — психологические нагрузки. Оценивание частоты ошибок человека следует проводить только после рассмотрения всех этих факторов, так как они влияют на качество работы оператора. Полученные оценки должны затем включаться в процедуру анализа дерева неисправностей.
Оценка надежности системы «человек—машина». Оценка надежности системы «человек—машина» может производиться различными методами: аналитическим, экспериментальным, имитационным. На этапах проектирова-ния преобладают расчетные методы, которые основаны на статистических данных о надежности и скорости выполнения заданных функций оператором, о надежности технических средств, влиянии различных факторов внешней среды на надежность техники, взаимном влиянии оператора и техники и пр. В системотехническом методе оценки надежности — СЧМ человек пред-ставляется в виде компонента системы. При этом выделяются следующие случаи оценки надежности системы при взаимодействии технических средств и человека-оператора при допущении, что отказы техники и ошибки оператора являются редкими, случайными и независимыми событиями, что появление более одного однотипного события за время работы системы от to до to + t практически невозможно, что способности оператора к компенсации ошибок и безошибочной работе — независимые свойства оператора. Если компенсация ошибок оператора и отказов техники невозможна, то вероятность безотказной работы системы: P1(to,t)=PT(to, t)P0(t) где PT (to,t) — вероятность безотказной работы технических средств в течение времени (to, to + t); P0(t) — вероятность безошибочной работы оператора в течение времени t при условии, что техника работает безотказно; to — общее время эксплуатации системы; t — рассматриваемый период работы. При «мгновенной» компенсации ошибок оператора с вероятностью р вероятность безотказной работы системы: P2(to, t) = PT(to, t){ P0(t)+[1- P0(t)]p}
В случае компенсации только отказов технических средств вероятность безотказной работы системы:
P3(to, t) = P0(t)[ PT(to, t)+ PK(to, t, δ)], где PK(to, t, δ) – условная вероятность безотказной работы системы в течение времени (to, t) с компенсацией последствий отказов, при условии, что в момент σ (to<δ< to+ t)произошел отказ. Вероятность безотказной работы системы с компенсацией ошибок оператора и отказов технических средств:
P4(to, t) = { P0(t)+ [1- P0(t)]p } [ PT(to, t)+ PK(to, t, δ)].
Выигрыш в надежности по вероятности безотказной работы Gp за счет компенсации ошибок и отказов характеризуется отношением:
GP = [P4(to, t)] / [P1(to, t)]. Выигрыш надежности увеличивается с ростом р и PK(to, t, δ), т.е.с увеличением уровня натренированности оператора на компенсации отказов и ошибок. Если рассматривать системы по степени непрерывности участия человека в процессе управления, то для каждого из этих типов систем существуют соответствующие критерии надежности. Для систем первого типа таким кри-терием является вероятность безотказного, безошибочного и своевременного протекания управляемого процесса в течение заданного времени t. Такое протекание процесса возможно в следующих случаях 1) технические средства работают исправно; 2) произошёл отказ технических средств, но при этом оператор безоши-бочно и своевременно выполнил требуемые действия по ликвидации ава-рийной ситуации; 3) оператор допустил ошибочные действия, но своевременно их исправил. В соответствии с ранее принятыми обозначениями надежность системы «человек—машина» запишется в виде
P1 = PT(t)+ [1- PТ(t)]·КОП [Р0св +(1- P0)PВ], Для СЧМ второго типа критерием надежности является вероятность безот-казного, безошибочного и своевременного выполнения возникающей задачи. Задача системой может быть выполнена в том случае, если в требуемый момент времени оператор готов к приему поступающей информации и, кроме того: 1) в течение паузы и времени решения задачи техника работала безотказно, оператор правильно и своевременно выполнял требуемые действия или 2) произошел отказ техники, но оператор своевременно устранил его и при решении задачи не допускал ошибок, или 3) при безотказной работе техники оператор допустил ошибку, но своевременно компенсировал ее. Расчет надежности примет вид
Р2 = КОП [ PT P0 Рсв + (1 - PT) Рвос+(1- P0) PT PВ], где Рвос — вероятность восстановления техники. Для систем третьего типа критерий надежности такой же, как и во втором случае. Задача системой может считаться выполненной, если: 1) в требуемый момент времени техника находится в исправном состоянии, не отказала во время выполнения задачи, действия операторов были безошибочны и своевременны, или 2) неготовая или отказавшая техника была своевременно восстановлена, а операторы не допустили ошибок; 3) при безотказной работе техники оператор допустил ошибку, своевременно компенсировал ее. Расчет надежности в этом случае можно вести по формуле P3 = КГРТ·РоРсв + (1 - PT КГ)РвосРо Рсв + (1 - Ро) PT PВ , где КГ — коэффициент готовности техники.
5.1.4. Требования безопасности к производственным процессам и оборудованию В ст.215 ТК РФ подчеркнуто, что машины, механизмы и другое производственное оборудование, транспортные средства, технологические процессы, материалы и химические средства индивидуальной и коллективной защиты работников, в том числе иностранного производства, должны соответствовать требованиям ОТ, установленным в Российской Федерации, и иметь сертификат соответствия. Предупреждение травматизма и заболеваемости на производстве – слож-ный процесс, требующий рационального размещения оборудования, органи-зации рабочих мест с учетом эргономики, применения безопасных производ-ственных процессов и оборудования, безопасной организации труда, четкого распределения и исполнения функций управленческого персонала по безопас-ности производства. Техника безопасности, согласно ГОСТ 12.0.002-80, это система органи-зационных мероприятий и технических средств, предотвращающих воздей-ствие на работающих опасных производственных факторов. К производственному оборудованию относятся машины, механизмы, аппараты, сосуды, линии, агрегаты, транспортные и другие устройства и сред-ства, эксплуатируемые на предприятии – все то, что можно считать техническими системами. В соответствии с ГОСТ 12.2.003-91 «ССБТ. Оборудование производст-венное. Общие требования безопасности»: · материалы конструкции производственного оборудования не · конструкция производственного оборудования должна исключать на всех предусмотренных режимах работы нагрузки на детали, сборочные единицы, способные вызвать разрушения, представляющие опасность для работающих; · конструкция производственного оборудования и его отдельных частей должна исключать возможность их падения, опрокидывания и самопроизвольного смещения при всех предусмотренных условиях эксплуатации и монтажа (демонтажа). Если из-за формы производственного оборудования распределение масс отдельных его частей и (или) условий монтажа (демонтажа) не может быть достигнута необходимая устойчивость, то должны быть предусмотрены средства и методы закрепления, о чем эксплуатационная документация должна содержать соответствующие требования; · конструкция производственного оборудования должна исключить падение при выбрасывании предметов (например, инструмента, заготовок, отработанных деталей, стружки, представляющих опасность для работающих, а также выбросов смазывающих, охлаждающих и других рабочих жидкостей); · движущиеся части производственного оборудования, являющиеся источником травмоопасности, должны быть ограждены или расположены так, чтобы исключалась возможность прикасания к ним работающего или использованы другие средства (например, двуручное управление), предотвращающие травмирование; · конструкция зажимных, захватывающих, подъемных и загрузочных устройств или их приводов должна исключать возможность возникновения опасности при полном или частичном самопроизвольном прекращении подачи энергии, а также исключать самопроизвольное изменение состояния этих устройств при восстановлении подачи энергии; · элементы конструкции производственного оборудования не должны иметь острых углов, кромок, заусенцев и поверхностей с неровностями, представляющими опасность травмирования работающих, если их наличие не определяется функциональным назначением этих элементов. В последнем случае должны быть предусмотрены меры защиты работающих; · части производственного оборудования (в том числе трубопроводы, гидро-, паро- и пневмосистемы, предохранительные клапаны, кабели и др.), механическое повреждение которых может вызвать возникновение опасности, должны быть защищены ограждениями или расположены так, чтобы предотвратить их случайное повреждение работающими или средствами технического обслуживания; · конструкция производственного оборудования должна исключать само-произвольное ослабление или разъединение сборочных единиц и деталей, а также исключать перемещение подвижных частей за пределы, предусмотренные конструкцией, если это может повлечь за собой создание опасной ситуации; · конструкция производственного оборудования, приводимого в действие электрической энергией, должна включать устройства (средства) для обеспечения электробезопасности; · производственное оборудование, действующее с помощью неэлектри-ческой энергии (например, гидравлической, пневматической энергии, пара), должно быть выполнено так, чтобы все опасности, вызываемые этими видами энергии, были исключены; · конструкция производственного оборудования и (или) его размещение должны исключать контакт его горючих частей с пожаровзрыво-опасными веществами, если такой контакт может явиться причиной пожара или взрыва, а также исключать возможность соприкасания работающего с горячими или переохлажденными частями или нахождение в непосредственной близости от таких частей, если это может повлечь за собой травмирование, перегрев или переохлаждение работающего; · конструкция производственного оборудования должна исключать опасность, вызываемую разбрызгиванием горячих обрабатываемых и (или) используемых при эксплуатации материалов и веществ; · трубопроводы, шланги, провода, кабели и другие соединяющие детали и сборочные единицы должны иметь блокировку в соответствии с монтажными схемами; · безопасность конструкции оборудования обеспечивается выбором принципов действия и конструктивных решений; · конструкция рабочего места, его размеры и взаимное расположение элементов (органов управления, средств отображения информации, вспомо-гательного оборудования и др.) должны обеспечивать безопасность при использовании производственного оборудования по назначению, техническом обслуживании, ремонте и уборке, а также соответствовать эргономическим требованиям. Технологические процессы должны соответствовать требованиям ГОСТ 12.3.002-75 «ССБТ. Процессы производственные. Общие требования безопас-ности» и предусматривать: · устранение непосредственного контакта работников с исходными материалами, заготовками, полуфабрикатами, готовой продукцией и отходами производства, оказывающими вредное воздействие, а также своевременное их удаление и обезвреживание; · замену операций, процессов на имеющие меньшую интенсивность воздействия опасных и вредных производственных факторов; · комплексную механизацию, автоматизацию, дистанционное управ-ление; · герметизацию оборудования; · рациональную организацию труда; · применение средств защиты, контроля за параметрами технологического процесса, обеспечивающего защиту работников и аварийное отключение оборудования, остановку технологического процесса; · своевременное получение информации о возникновении опасных ситуаций. Требования безопасности должны быть изложены в технологической доку-ментации. В соответствии с Федеральным законом «О промышленной безопасности опасных производственных объектов» установлены особые дополнительные требования к организации, эксплуатирующей опасный производственный объект, которые должны обеспечить безопасность применяемых производ-ственных процессов и оборудования, включая ОТ и охрану окружающей среды. К категориям опасных производственных объектов относятся объекты, на которых: 1) Получаются, используются, перерабатываются, образуются, хранятся, транспортируются, уничтожаются опасные вещества, список которых опре-делен. 2) Используется оборудование, работающее под давлением более 0,07 мегапаскаля или при температуре нагрева воды более 110°С. 3) Используются стационарно установленные грузоподъемные механизмы, эскалаторы, канатные дороги, фуникулеры. 4) Получаются расплавы черных и цветных металлов и сплавы на их основе. 5) Ведутся горные работы, работы по обогащению полезных ископаемых, а также работы в подземных условиях.
5.1.5. Средства защиты работников Для предотвращения или уменьшения воздействия на работающих опасных и вредных производственных факторов, создания необходимого микроклимата на рабочих местах применяются средства защиты работающих, которые классифицируются по ГОСТ 12.4.011-89 на следующие категории: средства коллективной защиты (СКЗ) и средства индивидуальной защиты (СИЗ). Средства коллективной защиты предназначены для защиты от конкретного опасного или вредного фактора в данном помещении или на рабочем месте. К средствам коллективной защиты относятся следующие основные средства безопасности: • оградительные устройства различной конструкции; • устройства автоматического контроля и сигнализации опасности, предназначенные для предупреждения операторов и других работающих о наступающей опасности или о произошедшей поломке, отказе и другой нештатной ситуации. Сигналы могут быть световые, звуковые, знаковые и в виде показаний прибора, и даже биомеханические. Для автоматического конт-роля служат предохранительные устройства, которые автоматически срабатывают, отключая оборудование или его узел при выходе какого-либо из параметров за предельно допустимые величины, и тормозные устройства, обеспечивающие возможность быстрой остановки производственного оборудо-вания или отдельных его элементов; контролирующие ход технологического процесса и состояние оборудования в целом и его отдельных узлов, механизмов и деталей; • системы дистанционного управления, позволяющие управлять из безопасного рабочего места устройствами, находящимися в труднодоступных и опасных зонах; • специальные средства безопасности, характерные для каждого класса, например: вентиляционные и воздухоочистительные системы, кондиционе-ры, обогреватели, охладители; осветительные приборы и светозащитные устройства; • звукопоглощающие и звукоизолирующие устройства, глушители шума, устройства виброгашения и виброизоляции, устройства заземления и зануления, изолирующие устройства и покрытия, нейтрализаторы, средства дезактивации, герметизирующие устройства, оборудование для дезинфекции, дезинсекции, стерилизации; • знаки безопасности и сигнальные цвета, привлекающие внимание и напоминающие работникам об опасности и необходимости соблюдения мер безопасности. Защитные ограждения включают: · ограждения, предназначенные не допустить человека в опасную зону; · ограждения для защиты человека от опасных выделений (выбросов, осколков, стружки и т.д.). Основные требования к ограждениям: во-первых, соответствие размеров ограждения размерам зоны; во-вторых, прочность ограждений должна соответствовать возможным нагрузкам. Ограждения бывают стационарными, подвижными, открывающимися на время вспомогательных операций, когда отсутствует опасность. Вращающиеся части станков закрываются глухими кожухами, прикрепленными к станку. Кожуха на сменных зубчатых передачах делаются откидными. Передачи (цеп-ные, зубчатые и др.), расположенные вне корпуса станка, оборудуются ограж-дением. Зона обработки ограждается экранами для защиты работающих от разлета-ющейся стружки. Защитные устройства, удаляемые при смене инструмента, детали и т.п. должны иметь массу не более 6 кг, а крепление - не требовать при-менения ключей, отверток. Усиление перемещения защитного устройства не должно превышать 40 Н. Ограждения выполняются в виде сварных или литых кожухов, сплошных экранов (щитков), решеток. При необходимости наблюдать за процессом обработки ограждение снабжают смотровым окном. Предохранительные защитные средства. Предохранительные устройства предназначены для отключения машин при отклонении какого-либо параметра за допустимые пределы. В зависимости от характера опасного фактора различают предохранительные устройства, защищающие от выхода за установленные предельные значения: • величины рабочего давления; • величины электрического тока, напряжения и другие параметры электроустановки; • скорости движения; • величины перемещения; • загазованности производственной атмосферы; • величины веса; • величины передаваемого усилия; • величины температуры. Для защиты машин от избыточного давления используют предохранитель-ные клапаны, разрывные мембраны. Предохранительные клапаны прямого действия (рис.5.5) пружинные, рычажно-грузовые различают по высоте подъема золотника (малого, среднего и большого подъема золотника). Основной характеристикой предохранитель-ного клапана служит расход газа (жидкости) через клапан G (кг/с).
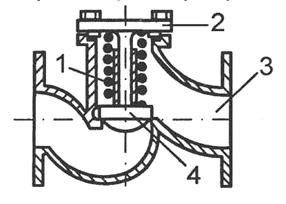
G = α FB/2ρ(ρ1 -ρ2), где α и F - коэффициент расхода и площадь сечения клапана (м2); ρ - плотность среды перед клапаном Обратные клапаны пропускают газ (жидкость) в одном направлении и пре-дохраняют движение газа (жидкости) в обратном направлении. На рис. 5.6. приведен обратный предохранительный клапан.
Рис. 5.5. Предохранительные клапаны прямого действия: а) магнитно – пружинный клапан; б) клапан пружинный с эжекторным устройством; в) клапан с дифференциальным поршнем
Рис. 5.6. Обратный клапан: 1 – пружина; 2 – крышка; 3 – корпус; 4 - золотник Защита аппаратов от разрушения при аварийном росте давления (взрыве) обеспечивается предохранительными мембранами, изготовляемыми из металла (алюминий, сталь и др.) (рис. 5.7). Проходное сечение F мембраны определяется с учетом объема газов Vr, подлежащих сбросу за время τ. F = где ω – скорость истечения продукта, τ - время достижения максимального давления.
Рис. 5.7 Схемы предохранительных мембран: а) разрывная; 1 - фланцы; 2 - мембрана; 3 - верхнее пружинное кольцо; 4 - нижнее прижимное кольцо; б) выщелкивающая: 1 - фланцы; 2 - кольцо; 3 - мембрана; 4 - припой.
Защитное отключение электроустановки - это система обеспечения безопасности путем автоматического отключения электроустановки при возникновении аварийной ситуации (повреждений), вызывающей опасность поражения людей. Такими опасными отклонениями являются: снижение сопротивления изоляции, замыкание на землю и др. Защитными средствами от опасных отклонений величин скорости и перемещений механизмов служат тормозные устройства. Тормоза подраз-деляются: • По конструкции: ленточные, колодочные, дисковые, грузоупорные, центробежные. • По характеру действия: автоматические, управляемые, разомкнутые, зам-кнутые. • По приводу: электрические, гидравлические, пневматические, механические. В грузоподъемных машинах используются спускные тормоза для торможения и остановки груза. Стопорные тормоза обеспечивают удержание груза, машины в заданном положении, остановку оборудования. Регуляторы скорости позволяют поддерживать заданную скорость вращения валов машин, скорость перемещения груза. Автоматические тормоза срабатывают при отклонении величины скорости (вращения, спуска), величины натяжения каната. Торможение возникает под воздействием поднятого груза в грузоподъемных тормозах или при возрастании центробежной силы при увеличении оборотов двигателя. Падение усилия натяжения при обрыве грузонесущего каната приводит к срабатыванию ловителей, удерживающих кабину подъемника (рис. 5.8).
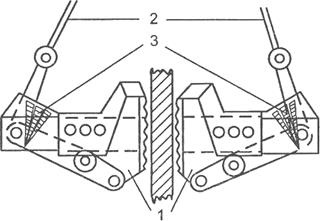
Рис. 5.8. Ловители кабины лифта при разрыве каната: 1 - клинья с рычагами; 2 - вспомогательные канаты; 3 - пружины, отжимающие клинья от направляющей Характеристикой тормозов является коэффициент запаса торможения, который определяется отношением момента, создаваемого тормозом, к статическому моменту на тормозном валу от наибольшего рабочего груза. Величина коэффициента запаса торможения принимается с учетом режима и ответственности работы, рода привода. Защита от загазованности производственных помещений токсичными и пожаровзрывоопасными газами достигается с помощью устройств, которые при достижении опасной концентрации прекращают поступление на производственный участок опасного вещества. Для этой цели вблизи оборудования устанавливаются стационарные газоанализаторы. При оценке концентрации используются различные методы: фотоколориметрический, на основе цветных реакций; термокондуктометрический, с использованием принципа измерения теплопроводности газовой смеси; оптический, по изменению оптических свойств анализируемого производственного воздуха. В качестве контролируемого параметра, при котором срабатывает автоматическая защита, прежде всего принимается концентрация взрыво-опасных веществ в воздухе помещений. Автоматическая защитная система состоит из датчиков, логического устройства для оценки сигнала, усилителя сигналов, устройства сигнализации и исполнительного механизма для проведения необходимых переключений. В случае прекращения подачи электроэнергии и сжатого воздуха исполнительный механизм автоматической системы должен устанавливать регулирующие органы в положение, исключающее возникновение аварий. Защиту машин от перегрузок (поднимаемого груза, передаваемого усилия) обеспечивают разнообразные ограничители грузоподъемности, введенные в кинематическую цепь, слабое звено. Для ограничения грузоподъемности кранов и исключения их поломки и аварии используются ограничители грузоподъемности (рис. 5.9), отключающие подъемный механизм при превышении нормативного веса.
Рис. 5.9. Ограничитель грузоподъемности: 1 - шток; 2 - ролики; 3 -выключатель; 4 - рычаг выключателя Использование
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 295; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.72.55 (0.014 с.) |



 ; В – табличный коэффициент; ρ1 и ρ2- абсолютное давление перед и за клапаном (Па).
; В – табличный коэффициент; ρ1 и ρ2- абсолютное давление перед и за клапаном (Па).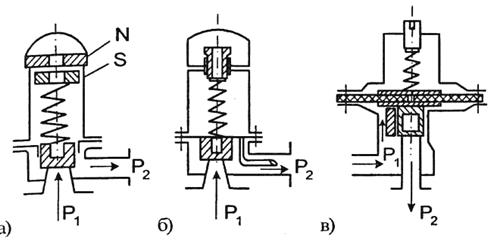
 ,
,