
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Стохастична фільтрація в каналах вимірюванняСодержание книги
Поиск на нашем сайте
Системи керування та наукових досліджень, де циркулює вимірювальна інформація, можуть містити некорельовані перешкоди, в тому числі і довільної форми. В колах керування джерелом перешкод є ЦАП та арифметично – логічні пристрої (АЛУ). В колах вимірювання - перешкода це кольоровий шум. Чим складніша процедура отримання початкової інформації тим більше завада відрізняється від білого шуму. Її математична модель може бути складніша за модель корисного сигналу. Тому задачу фільтрації вирішують для найбільш поширеного вузького набору вихідних характеристик. В найпростішому випадку сигналів без періодичної складової моделі корисного сигналу і завади співпадають за формою, але істотно відрізняюься за параметрами. Для корисного сигналу:
Для некорельованої перешкоди: А) довільної форми Б) білого шуму Приклад 1. Синтезуємо фільтр, котрий забезпечує виділення сигналу
Фур’є – вирази яких є Нормування зменшує в
а завади:
Ідеальний сигнал на виході в задачі відтворення сигналу на фоні завади:
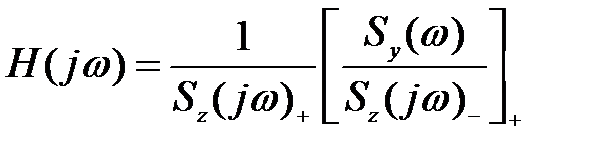
Область спостереження вхідного нескінченна, що практично відповідає умові значного перевищення інтервалу спостереження над часом корекції вхідного сигналу. Частотна характеристика оптимального фільтра:
Спектральна щільність вхідного сигналу:
Після перетворень:
де: Проведемо факторизацію: Звідки з врахуванням (5.3):
Або:
Далі, відповідно (5.1) та (5.5) та спектральної щільності:
де: Сепарація останнього виразу:
Розклавши (5.6) на дроби, отримаємо:
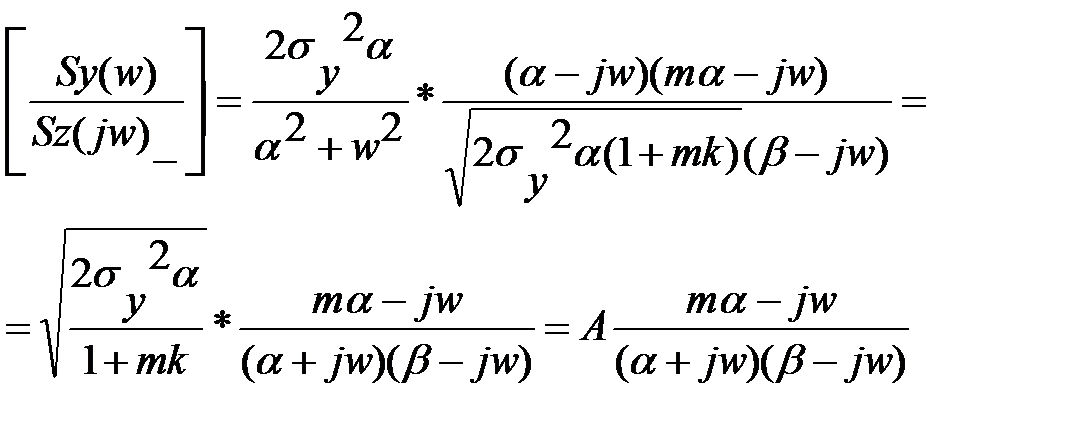
Тоді сепарований вираз відношення спектральних щільностей сигналу до факторизованої спектральної щільності зашумленого сигналу має вигляд:
З (5.1), (5.5), (5.7) отримаємо оптимальну частотну характеристику статистичного фільтра:
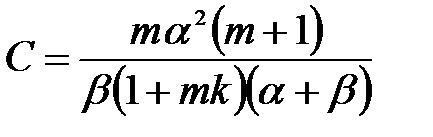
де:
Звідки шукана функція статистичного фільтра:
Таким чином, оптимальний статистичний фільтр - це інерційно - форсуюча ланка. Її суттєвий параметр – коефіцієнт відношення постійних часу форсування та інерційності:
Рис. 5.1. Безперервний варіант оптимального статистичного фільтра за каналами виміру
Цей фільтр може бути уявлений у вигляді інерційного та інерційно – диференцюючих ланок з наступним проходженням сигналу через підсилювач з коефіцієнтом передачі, обумовленим величиною співвідношення дисперсій перешкода/корисний сигнал та зсувом цього співвідношення за фазою:
Прослідкуємо за деформацією властивостей статистичного фільтра по мірі росту співвідношення перешкода/корисний сигнал. 1) 2) При рості 3) 4) Ріст співвідношення перешкода/корисний сигнал веде до зростання інерційно – інтегральних властивостей фільтра. В границях Тому що де
Виходячи з (5.11), квадрат модуля частотної характеристики оптимальної системи буде:
З врахуванням (5.2), отримаємо:
Після розкладення на елементарні дроби та перетворень, останній інтеграл прийме вигляд:
Після обчислення інтегралів:
Підставляючи останній вираз в (5.12), визначимо середньоквадратичну похибку через параметри вхідного сигналу:
де параметри
Тоді при З формули (5.19) слідує, що: або
Підставивши параметри перешкоди
|
||||
|
|
Последнее изменение этой страницы: 2016-08-06; просмотров: 185; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.192.214 (0.005 с.) |



 де
де  – дисперсія корисного сигналу;
– дисперсія корисного сигналу;  перешкода більш високочастотна, ніж корисний сигнал.
перешкода більш високочастотна, ніж корисний сигнал.  – інтенсивність білого шуму.
– інтенсивність білого шуму. , спостерігаємого з перешкодою
, спостерігаємого з перешкодою  .
. та
та  – некорельовані, тоді вхідний сигнал:
– некорельовані, тоді вхідний сигнал:  має характеристики:
має характеристики:  ;
;  ,
, ;
;  .
. раз корисний сигнал, тоді його спектральна щільність:
раз корисний сигнал, тоді його спектральна щільність: ,
, .
. .
. (5.1)
(5.1) . (5.2)
. (5.2) , (5.3)
, (5.3) (5.4)
(5.4) .
.
 (5.5)
(5.5)
 (5.6)
(5.6) .
. .
. .
. . (5.7)
. (5.7) ,
, ;
;  (5.8)
(5.8) (5.9)
(5.9) . (5.10)
. (5.10)
 . (5.11)
. (5.11) відсутність перешкоди. В цьому випадку з (5.9) – (5.11) слідує, що
відсутність перешкоди. В цьому випадку з (5.9) – (5.11) слідує, що  . Статистичний фільтр є безінерційний підсилювач з коефіцієнтом підсилення
. Статистичний фільтр є безінерційний підсилювач з коефіцієнтом підсилення  .
. >>1 але так, що
>>1 але так, що  високочастотна перешкода. Тоді
високочастотна перешкода. Тоді  ;
;  залишимо трохи менше 1.
залишимо трохи менше 1. та падінні
та падінні  , але так, щоб
, але так, щоб  , коефіцієнт підсилення
, коефіцієнт підсилення  та
та 
 зменшуються. Триває подальше зростання інерційно – інтегральних властивостей фільтра.
зменшуються. Триває подальше зростання інерційно – інтегральних властивостей фільтра. та
та  – істотно високочастотна перешкода. В цьому випадку
– істотно високочастотна перешкода. В цьому випадку 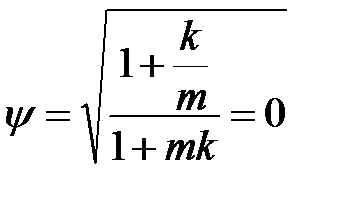 ;
;  кінцево. Тоді
кінцево. Тоді  фільтр є чисто інерційною ланкою (інерційним підсилювачем).
фільтр є чисто інерційною ланкою (інерційним підсилювачем). >1=const – нескінченно велика перешкода, тут
>1=const – нескінченно велика перешкода, тут  <<1;
<<1;  .Фільтр закриває вимірювальний канал від нескінченно великих перешкод.
.Фільтр закриває вимірювальний канал від нескінченно великих перешкод. ці властивості спочатку інерційні, а потім фільтр спрацьовує як своєрідний вентиль з перемінною пропускною здатністю 0<
ці властивості спочатку інерційні, а потім фільтр спрацьовує як своєрідний вентиль з перемінною пропускною здатністю 0<  ≤1, відсікаючи вимірювальний канал від небажаних перетворень. Точність виділення корисного сигналу системою оцінюється середнім квадратом похибки
≤1, відсікаючи вимірювальний канал від небажаних перетворень. Точність виділення корисного сигналу системою оцінюється середнім квадратом похибки  або
або  .
. , то
, то  , (5.12)
, (5.12) . (5.13)
. (5.13) . (5.14)
. (5.14) . (5.15)
. (5.15)
 . (5.16)
. (5.16) . (5.17)
. (5.17) , (5.18)
, (5.18) виражені формулами (5.4), (5.11), (5.18) одночасно визначає допустиму область змін параметрів перешкоди
виражені формулами (5.4), (5.11), (5.18) одночасно визначає допустиму область змін параметрів перешкоди  та
та  .
. . (5.19)
. (5.19) ,
,  .
. ,
, тобто припустима область визначення параметрів перешкоди є напівпряма:
тобто припустима область визначення параметрів перешкоди є напівпряма: (5.20)
(5.20) та
та  , котрі задовольняють припустимій області (5.20), в (5.18) знаходимо, що дисперсія помилки фільтрації
, котрі задовольняють припустимій області (5.20), в (5.18) знаходимо, що дисперсія помилки фільтрації  зростає від 0, при
зростає від 0, при  , до дисперсії корисного сигналу
, до дисперсії корисного сигналу  , при
, при  відповідно, тобто
відповідно, тобто  при
при  та
та  .
.


