Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Направленность поля преобразователяСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Направленность поля преобразователя, характеризуемая его диаграммой направленности, определяет погрешность измерения координат и условных размеров дефектов. Числовыми характеристиками диаграммы направленности является угол наклона акустической оси α0 и угол раскрытия основного лепестка 2θ на уровне 3 дБ от максимума при работе в режиме излучения - приема. Мертвая зона Мертвая зона rmin (минимальная глубина прозвучивания) определяется минимальной глубиной залегания дефекта, надежно выявляемого дефектоскопом. Мертвая зона определяется по отражению ультразвука от искусственного дефекта типа цилиндра диаметром 2 мм, выполненного в образце из контролируемого материала. При контроле стальных изделий мертвая зона оценивается по СО-2. Значение rmin приближенно определяется по формуле
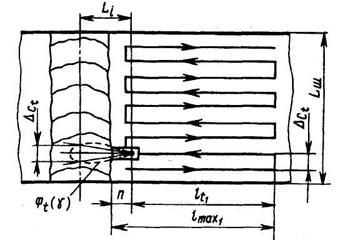
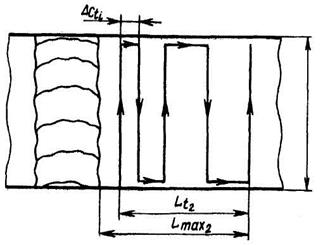
где Угол ввода колебаний Угол ввода луча α определяют как угол между нормалью к поверхности и направлением от точки выхода (или акустического центра) преобразователя на центр отверстия диаметром 6 мм в образце СО-2 при положении преобразователя, соответствующему максимуму эхо-сигнала от этого отверстия. Если преобразователь имеет большие размеры, большую ближнюю зону или контролируется материал, отличный от стали по скорости распространения звука, используют образец, подобный СО-2. Угол ввода отклоняется от угла αc, рассчитанного по закону синусов, в сторону угла, где достигается максимум коэффициента прозрачности для границы акустическая задержка (призма) - изделие. На больших глубинах залегания дефекта угол α уменьшается в связи с тем, что меньшим углам соответствует меньший путь точка выхода - отражатель, а это способствует увеличению амплитуды эхо-сигнала. При глубине залегания дефекта, большей 150 мм, необходимо измерять угол α на образце с повышенной глубиной залегания отверстия диаметром 6 мм. Эта глубина может быть уменьшена, если контролируется материал с большим затуханием или ширина диаграммы направленности преобразователя больше, чем для стандартных преобразователей. Разрешающая способность Разрешающая способность эхо-метода определяется минимальным расстоянием между двумя одинаковыми дефектами, при котором эти дефекты фиксируются как раздельные. Различают лучевую Δr и фронтальную Δl разрешающие способности. Лучевая определяется минимальным расстоянием Δr между двумя раздельно выявляемыми дефектами, расположенными в направлении хода луча вдоль акустической оси преобразователя. Такие отражатели в виде пазов или концентрических отверстий разного диаметра предусмотрены в СО-1. Значение Фронтальная разрешающая способность определяется минимальным расстоянием Δl между двумя раздельно выявляемыми дефектами, расположенными вдоль фронта волны (для прямого преобразователя на одной глубине). Значение Δl должно превышать большее из двух значений - D или 1,2(rλ/D), где D - размер преобразователя. Параметры сканирования Параметры сканирования - это скорость перемещения преобразователя относительно поверхности контролируемого изделия и шаг между соседними траекториями перемещения. Эти параметры определяют производительность контроля. Они должны обеспечить проверку всего объема изделия (при стопроцентном контроле). В практике контроля в основном применяют способы поперечно-продольного и продольно-поперечного перемещения преобразователя. Способ сканирования, при котором преобразователь (систему преобразователей) перемещают в поперечном направлении относительно контролируемого сечения, систематически сдвигая на определенный шаг в продольном направлении, является способом поперечно-продольного перемещения преобразователей (см. рис. 5, а). При продольно-поперечном способе перемещения (рис 5, б) преобразователь (систему преобразователей) перемещают в продольном направлении относительно контролируемого сечения, систематически сдвигая на определенный шаг в поперечном направлении. Расстояние между соседними траекториями точки ввода упругих колебаний при любом способе сканирования называют шагом сканирования.
а б Рис. 5. Схемы сканирования шва посредством поперечно-продольного (а) и продольно-поперечного (б) перемещения преобразователя Шаг сканирования Δс обычно устанавливают не меньше половины размера пьезоэлемента преобразователя в направлении шага. Более точное значение шага (это особенно существенно при автоматическом контроле) определяется минимальной шириной акустического поля преобразователя на определенном уровне от максимального значения чувствительности. Обычно чувствительность при поиске дефектов устанавливается выше уровня фиксации (чаще всего, на 6 дБ). Это превышение определяет уровень ширины акустического поля при установлении шага сканирования. Сканирование объекта можно вести посредством продольного, поперечного, поперечно-продольного, продольно-поперечного перемещения преобразователей, а также бегающим и качающимися лучами. Скорость v перемещения преобразователя при ручном контроле не должна превышать 150 мм/с. При автоматическом контроле она ограничивается частотой посылок зондирующих импульсов Nи и инерционностью регистратора дефектов, определяемой числом импульсов Nр, от которого срабатывает регистратор. Для круглого или квадратного преобразователя
|
||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 414; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.23.110 (0.007 с.) |

 ,
,  - длительность соответственно импульса и реверберационных шумов преобразователя на уровне 0,1.
- длительность соответственно импульса и реверберационных шумов преобразователя на уровне 0,1. .
.