Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Акустическое поле преобразователяСодержание книги
Поиск на нашем сайте
Акустическое поле излучения преобразователя определяется давлением (или действующей компонентой тензора напряжения), которое действует на элементарный приемник, расположенный в произвольной точке пространства. Акустическое поле приема определяется сигналом приемного преобразователя при действии элементарного излучателя, расположенного в произвольной точке пространства. Акустическое поле излучения – приема определяется сигналом приемного преобразователя, возникающим при отражении сигнала возбуждающего преобразователя от элементарного рассеивателя, расположенного произвольной точке пространства. Обычно поле приема преобразователя повторяет его же поле излучения. Поэтому поле из0лучения – приема одного и того же преобразователя пропорционально квадрату поля излучения. Для наглядности мы рассмотрим формирование полей излучения с точки зрения геометрической акустики, путем построения моделей прохождения лучей продольных, сдвиговых и поверхностных волн в некоторых телах, ограниченных плоскими и кривыми поверхностями. Будем считать твердые тела однородными, изотропными, а ограничивающие их поверхности – гладкими. Рассмотрим геометрию волнового опля дискового излучателя, расположенного на плоской поверхности твердого упругого полупространства с неограниченными размерами по осям Х, У, Z. Считаем, что излучатель создает напряжение
Рис. 6 Такое поле имеет две зоны: 1. ближняя зона (зона Френеля) толщиной
Для ближней зоны максимум наблюдается при
Рис. 7 2. дальняя зона (зона Фраунгофера) – это зона при
где Для дальней зоны диаграмма направленности имеет вид, показанный на рис. 8.
где
Рис. 8 На рис. 9 показано изменение формы пучка при увеличении диаметра преобразователя.
Рис. 9 Такая картина является идеальной. Практически мы всегда имеем дело с ограниченными телами. Кроме того, нормально приложенная к поверхности среды сила, вызовет в ней не только нормальную компоненту напряжения. На границах преобразователя возникнут напряжения, перпендикулярные направлению действующей силы, т.е. параллельно поверхности. В результате на границе излучателя возникнут сдвиговые и поверхностные волны, затухающие с глубиной. Взаимодействие всех этих волн приводит к искажению идеальной картины. Кроме того, реальные тела имеют ограниченные размеры, т.е. существуют границы. Отраженные от границ волны взаимодействуют с первичными, создавая сложные акустические поля. Основные методы акустического контроля Общие сведения Акустическими методами называют методы контроля, основанные на изменении упругих колебаний и волн в контролируемом объекте. Согласно ГОСТ 23829-79 акустические методы делят на две большие группы: Активные - использующие излучение и прием акустических колебаний Пассивные – основанные только на приеме колебаний. К активным методам относят методы, основанные на прохождении и отражении УЗК. АКТИВНЫЕ МЕТОДЫ Теневой метод. Основан на ослаблении проходящих ультразвуковых волн при наличии внутри детали дефектов, создающих ультразвуковую тень (рис. 1).
Рис. 1 При теневом методе используется два преобразователя. Один из них излучает УЗК, а другой принимает их. Уменьшение интенсивности колебаний зависит от величины дефекта. Чем больше дефект, тем больше ослабляется звуковой поток. Теневой метод малочувствителен. Дефект можно обнаружить, если вызываемое им изменение сигнала составляет 15-20%. Более мелкие дефекты не обнаруживаются. Существенный недостаток теневого метода – невозможность определить глубину залегания дефекта. Кроме того, при контроле трудно определить изменения сигнала за счет дефекта от изменения сигнала за счет изменения толщины детали. Так как теневой метод не зависит от разрешающей способности излучателя, он нашел широкое применение при дефектоскопии тонких деталей (стальных листов, автомобильных покрышек и др.).
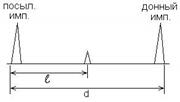
Временной теневой метод. Метод основан на измерении временного запаздывания УЗ импульса при огибании дефекта. Имеет те же преимущества и недостатки что и теневой метод. Велосиметрический метод. Основан на изменении скорости упругих волн при наличии дефекта. Например, если в тонком изделии распространяется изгибная волна, то появление расслоения вызовет уменьшение ее скорости, которая обычно измеряется по сдвигу фазы прошедшей волны. В методах отражения используют как один, так и два преобразователя; применяется как правило импульсное излучение. Выделяют следующие методы: Эхо-метод. Высококачественный генератор вырабатывает кратковременные импульсы (либо с высокочастотным заполнением – радиоимпульсы, либо просто короткие импульсы). Посланный излучателем импульс, отразившись, возвращается обратно к преобразователю, который работает в это время на прием (рис. 2)
Рис. 2 С преобразователя сигнал поступает на усилитель, а затем, на отклоняющие пластины элт (рис. 3).
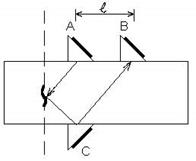
Рис. 3 Эхо-метод обладает рядом преимуществ перед теневым. Он позволяет использовать изделия при одностороннем доступе к ним. Это особенно ценно при проверке изделий, в которых отсутствует двусторонний доступ. Кроме того, чувствительность эхо-метода значительно выше теневого. При теневом методе ослабление УЗК на 5% трудно зарегистрировать, а при эхо-методе отражение даже 1% энергии очень хорошо не только обнаруживается, но и измеряется. Кроме того, эхо-метод позволяет определить, на какой глубине находится дефект. Если временное расстояние между зондирующим и отраженным от противоположной поверхности детали (донный импульс) принять за размер детали, то время между посылаемым импульсом и моментом прихода отраженного от дефекта импульса дает глубину залегания дефекта. Кроме того, по амплитуде отраженного сигнала можно судить о размерах дефекта, а изучая спектральный состав отраженного импульса, можно получить информацию о типе и форме дефекта. Главный недостаток эхо-метода – наличие мертвой зоны под датчиком, что не дает возможности применять его для тонких изделий. Наличие мертвой зоны связано с тем, что при близко расположенном дефекте в момент прихода эхо-сигнала от него еще продолжается излучение зондирующего импульса. Для уменьшения мертвой зоны повышают частоту УЗК, что позволяет уменьшить длительность зондирующего импульса. Длительность импульса определяет и разрешающую способность метода, т.е. минимальное расстояние между дефектами по глубине, при котором их эхо=сигналы воспринимаются раздельно. Очевидно разрешающая способность эхо-метода по глубине равна длительности зондирующего импульса. Повышение частоты с целью увеличения разрешения ограниченно сверху тем, что короткие волны начинают отражаться от границ кристаллических зерен металла, что вызывает появление помех. Кроме того, с увеличением частоты возрастает затухание УЗК. Эхо-зеркальный метод. Является разновидностью эхо-метода, и используется для обнаружения дефектов, ориентированных вертикально к поверхности изделия (рис. 4)
Рис. 4 Обычным эхо-методом такой дефект не обнаруживается из-за очень малой площади его сечения в плоскости поверхности. Для обнаружения таких дефектов наклонные искатели А и В располагаются на некотором расстоянии L с одной стороны изделия, либо второй тоже наклонных искатель С располагается с противоположной стороны. Расстояние L определяется толщиной изделия и углом ввода УЗК в изделие. Т.к. площадь дефекта в сечении, перпендикулярном вводимому наклонному лучу значительно превышает площадь нормального к поверхности сечения дефекта, то повышается вероятность обнаружения и чувствительность контроля.
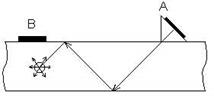
Дельта-метод. Использует рассеяние УЗК на дефектах. Для этого УЗК с помощью наклонного искателя А вводиться в изделие и распространяется в нем вдоль изделия (рис. 5).
Рис. 5 Искатель В (приемник) сканирует поверхность изделия. В месте расположения дефекта УЗК будут отражаться в различных направлениях. Часть из них отразиться в направлении к поверхности и будет зарегистрирована искателем В. Этот метод позволяет получить визуальное распределение дефектов в плане. Реверберационный метод. Метод предназначен для контроля слоистых конструкций, например, металл-пластик и основан на анализе длительности реверберации УЗК (рис. 6)
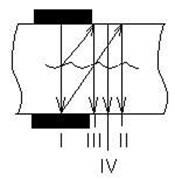
Рис. 6. Когда преобразователь расположен в точке А с плотным контактом между слоями, то УЗК проходят из металла в пластик и там гасятся. В результате потери энергии УЗК оказываются достаточно большими, что приводит к быстрому гашению реверберации. А области неплотного контакта между слоями большая часть энергии УЗК отражается назад в металл. Т.к. поглощение энергии УЗК в металле мало, то УЗК будет затухать достаточно медленно, т.е. длительность реверберации будет увеличиваться. Существует ряд методов, использующих комбинацию проходящих и отраженных УЗК. Выделяют такие методы: Зеркально-теневой метод. Измеряется амплитуда УЗК, отраженного от противоположной поверхности изделия (донный импульс), т.е. дважды прошедшего через изделие. Величина ослабления зависит от размеров дефекта. Эхо-теневой метод. В этом методе анализируются как пришедшие, так и отраженные сигналы. Эхо-сквозной метод. В этом методе фиксируется сквозной сигнал I и сигнал II, испытавший двукратное отражение (рис. 7).
Рис. 7 При появлении дефекта эти сигналы уменьшаются как в теневом и зеркально-теневом методах. Кроме того, появляются эхо-сигналы III и IV, соответствующие отражениям дефектов лучей I и II. По сравнению с теневым методом эхо-сквозной метод обладает повышенной чувствительностью. Преимуществом по сравнению с обычным эхо-методом является уменьшение размеров мертвой зоны из-за увеличения пути отраженного сигнала. Недостаток – трудность точной оценки местоположения дефекта и его размеров.
От рассмотренных методов существенно отличается Импедансный метод. Он основан на использовании зависимости полного механического импеданса (сопротивления) контролируемого изделия от качества соединения его элементов между собой (рис. 8). Изменение входного импеданса изделия может быть обнаружено по изменению амплитуды или фазы силы реакции, оказываемой на датчик или по изменению частоты датчика. Чаще всего используется для контроля клеевых, паяных, клепаных соединений.
Рис. 8 В приборах импедансного типа датчик представляет собой стержень, на разных концах которого расположены излучатель и приемник. Излучатель возбуждает в стержне колебания, а приемник фиксирует их. Такой датчик приводится в акустический контакт с изделием, в результате которого изменяется либо частота колебаний стержня, либо амплитуда и фаза сигналов с приемника. При использовании стоячих волн возбуждаются свободные или вынужденные колебания либо объекта контроля в целом (интегральные методы), либо его части (локальные методы). Свободные колебания чаще всего возбуждаются путем механического удара, а вынужденные - путем воздействия гармонической силы с переменной частотой. Состояние объекта анализируется по частоте свободных колебаний. Иногда используют амплитуду колебаний. На использовании стоячих волн основаны следующие методы:
|
||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 641; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.253.84 (0.011 с.) |

 , нормальное к поверхности. Если пренебречь влиянием промежуточных слоев между излучателем и средой, то волновое поле будет иметь вид, представленный на рис. 6.
, нормальное к поверхности. Если пренебречь влиянием промежуточных слоев между излучателем и средой, то волновое поле будет иметь вид, представленный на рис. 6.
 , в пределах которой отсутствует расхождение лучей и пучок лучей в сечении повторяет сечение пластины. При этом
, в пределах которой отсутствует расхождение лучей и пучок лучей в сечении повторяет сечение пластины. При этом
 (рис. 2.15)
(рис. 2.15)
 , в пределах которой наблюдается расхождение лучей. Она характеризуется тем, что интенсивность акустической волны при удалении от преобразователя уменьшается обратно пропорционально расстоянию r. Угол расхождения
, в пределах которой наблюдается расхождение лучей. Она характеризуется тем, что интенсивность акустической волны при удалении от преобразователя уменьшается обратно пропорционально расстоянию r. Угол расхождения  , за пределами которого интенсивность волны меньше 0,1 равен
, за пределами которого интенсивность волны меньше 0,1 равен
 - длина волны.
- длина волны.


 - функция Бесселя первого рода
- функция Бесселя первого рода