Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор частотного преобразователяСодержание книги
Поиск на нашем сайте
Раскрыть понятие – частотный преобразователь. Описать назначение, принцип действия, области применения частотных преобразователей и преимущества их использования в АЭП. При выборе частотного преобразователя необходимо учитывать мощность двигателя, а также максимальную и минимальную частоты вращения ротора для выбранного способа регулирования. Для определения максимальной частоты, которую должен обеспечить на выходе частотный преобразователь, необходимо определить во сколько раз изменится скорость для максимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной. По формуле 2.12 следует определить скорость вращения ротора электродвигателя:
где Соответственно, при скольжении По формуле 2.13 вычислить, во сколько раз увеличилась скорость ротора для искусственной характеристики:
Так как скорость вращения ротора прямо пропорциональна частоте питающей сети, то вычислить, как увеличилась частота питающей сети, можно, воспользовавшись формулой 2.14:
Если полученная частота не удовлетворяет условию Для определения минимальной частоты, которую должен обеспечить на выходе частотный преобразователь, необходимо определить во сколько раз изменится скорость для минимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной (на естественной характеристике двигатель работает при частоте питающей сети, равной 50Гц). Вычислить, во сколько раз уменьшилась скорость ротора для искусственной характеристики:
Вычислить, как уменьшилась частота питающей сети (формула 2.16):
Если полученная частота не удовлетворяет условию По каталогам известных фирм-производителей выбрать частотный преобразователь, исходя из следующих условий: - мощность преобразователя:
- полученный диапазон регулируемых частот; - заданное напряжение; - номинальный ток:
Указать фирму-производителя (ссылка на источник информации обязательна), аргументировать свой выбор, привести технические характеристики выбранного преобразователя частоты. Указать способ регулирования для проектируемого привода. Выбор комплектного асинхронного привода Сформулировать, в чём заключается основное функциональное значение комплектного асинхронного привода. Обосновать, в каких случаях предпочтительнее покупка комплектного асинхронного электропривода по сравнению с покупкой отдельных силовых частей АЭП. Выбор комплектного автоматизированного электропривода, состоящего из асинхронного двигателя и преобразователя частоты, осуществить по данным, полученным в подразделе 2.2: - требуемая мощность двигателя; - частота питающего напряжения; - синхронная скорость; - максимальная и минимальная частоты вращения ротора для выбранного способа регулирования; - мощность преобразователя:
- полученный диапазон регулируемых частот выходного напряжения; - заданное напряжение; - номинальный ток:
- требуемые защиты. Указать фирму-производителя (ссылка на источник информации обязательна) и тип выбранного комплектного АЭП с указанием типа и технических данных входящих в него АДК и ПЧ, отобразить внешний вид электродвигателя и/или частотного преобразователя или функциональную схему частотного преобразователя. Аргументировать свой выбор, обозначить основные технические характеристики электропривода, достоинства и функциональные возможности.
Примеры выполнения курсового проекта Пример №1 Введение Современный автоматизированный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности. В настоящее время автоматизированный электропривод является основным видом привода стационарных машин и механизмов. В качестве двигателей используются электрические машины постоянного и переменного тока различных типов. Для управления двигателями используются специализированные частотные и тиристорные преобразователи. Современный электропривод, как правило, автоматизирован. Автоматическая система управления электроприводом позволяет наиболее рационально построить технологический процесс, повысить производительность труда, улучшить качество продукции и снизить ее себестоимость.
Тема данной курсовой работы: «Расчет и выбор силовой части автоматизированного привода» актуальна, так как определяющим фактором работы автоматизированного электропривода является правильно выбранная силовая часть. В рамках курсовой работы будут рассмотрены такие аспекты, как расчёт и выбор двигателей постоянного и переменного тока, расчёт и выбор преобразователей постоянного и переменного тока, выбор комплектного асинхронного привода. Будут рассмотрены двигатели и преобразователи российского и зарубежного производства.
АЭП с ДПТ НВ Схема регулирования ТП-Д
Рис.1.1 Двухконтурная схема регулирования
Рис. 3.1. Функциональная схема двухконтурного подчинённого регулирования по системе ТП-Д В данную схему входят: SA – программируемый логический контроллер или ПК с соответствующим ПО, т.е. электронное устройство, которое задаёт требуемую технологическим процессом скорость вращения вала двигателя. Сигнал с него одновременно поступает и в основной контур, и во вспомогательный контур. В основной контур входят: BR – тахогенератор, который измеряет фактическую скорость вращения вала прямым измерением; PC - реле скорости; РТ – реле тока; СИФУ1 – система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал; UZ1 – реверсивный тиристорный преобразователь; UA1 – измеряющее разделительное устройство, с помощью которого косвенным методом (по напряжению и току) измеряется фактическая скорость вращения вала; UE – определение напряжения на обмотке якоря. Во вспомогательный контур входят: РТВ – реле тока обмотки возбуждения; СИФУ2 - система импульсно-фазового управления, в которой окончательно формируется управляющий сигнал; UZ2 – неревесивный тиристорный преобразователь, UA2 - измеряющее разделительное устройство. Обозначенные на схеме элементы под номерами 1, 2, 3, 4 – сравнивающие устройства. Основной контур обеспечивает регулирование скорости вращения вала двигателя в первой зоне изменением напряжения на зажимах якоря. Вспомогательный контур является подчинённым и осуществляет регулирование во второй зоне за счет уменьшения (ослабления) магнитного потока, создаваемого обмоткой возбуждения. 3.1. 3 Выбор ДПТ НВ Исходные данные представлены в таблице 3.1 [1]. Таблица 3.1
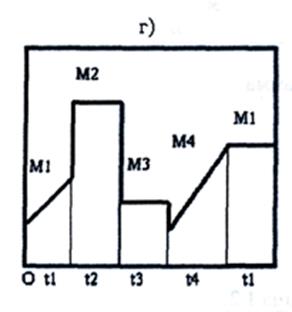
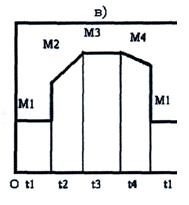
Рис.3.2 Заданная диаграмма моментов Для выбора двигателя производим построение временной диаграммы моментов (рис.3.3) с учётом изменений или постоянства моментов в определённые промежутки времени.
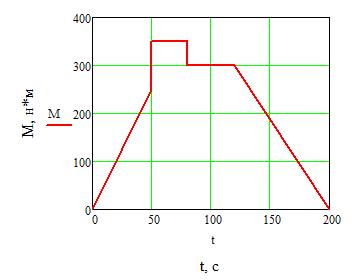
Рис. 3.3 Временная диаграмма моментов для заданного АЭП с ДПТ НВ Затем определяем продолжительность включения ПВ= ПВ= Определяем эквивалентный момент по формуле 3.2. Коэффициент
Таблица 3.2
Мэ= Мэ= Находим необходимую эквивалентную мощность, исходя из эквивалентного момента и заданной скорости вращения якоря
Так как согласно варианта n= 1070 об/мин, тогда по формуле 3.3
Искомая номинальная мощность двигателя принята равной (формула 3.4) Pном=(1,1-1,3)*PЭ (3.4) Рном=(1,1-1,3) * 26.625кВт=(29.2875-34.6125) кВт. Способ соединения ОЯ и ОВ – независимый, так как в промышленных АЭП для двухзонного регулирования применяются двигатели постоянного тока с независимым возбуждением.
Рис. 3.4 Схема соединений ОЯ с ОВ в ДПТНВ По справочным данным (ссылка на источник информации обязательна) выбран электродвигатель постоянного тока 4ПН225S. · Номинальная мощность: Pном=32 кВт · Номинальное напряжение: U=220В · Номинальная частота вращения nном=1060 об/мин, · Максимальная частота вращения двигателя nmax=2500 об/мин · Номинальный ток: Iном=164 А · КПД=85% Электрические машины постоянного тока серии 4П с высотой оси вращения 200–280мм предназначены для комплектации электроприводов постоянного тока общепромышленного назначения (бумагоделательных, красильно-отделочных и подъемно- транспортных машин, полимерного оборудования, а также буровых станков и вспомогательных агрегатов экскаваторов). Режим работы электродвигателей продолжительный S1 по ГОСТ 183. Электродвигатели допускают работу в режимах S2-S8 по ГОСТ183 при условии, что среднеквадратичный ток за цикл не превышает номинальное значение. Возбуждение электродвигателей независимое 110, 220 В. Степень защиты электрических машин — IP23 по ГОСТ17494, электродвигатели типа 4ППМ, 4ПОМ и 4ПБМ имеют степень защиты IP44, вводное устройство всех типов машин —IP44. Способ охлаждения электродвигателей IC01, IC06, IC0041, IC0141, IC17, IC37 по ГОСТ20459. Механические воздействия по группе М8 ГОСТ17516 - 190Е. Электродвигатели выпускаются в конструктивном исполнении IMB3, IMV5, IMV6, IMВ35, IMV1, IMV2, IM1002, IM1012, IM1032, IM2002, IM2012, IM2032 по ГОСТ2479. Структура условного обозначения: 4П — обозначение серии машины; Х — обозначение машины в зависимости от исполнения по степени защиты и способа охлаждения: Ф — защищенное P23 с независимой вентиляцией от постороннего вентилятора IC06; Н — защищенное IP23 с самовентиляцией IC01; П — закрытое IP44 (защищенное IP23) продуваемое от постороннего вентилятора IC37 (IC17); Б — закрытое IP44 с естественной вентиляцией IC0041; О — обдуваемое ICO141. М — модификация серии 4П;
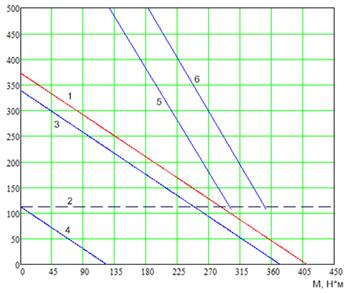
ХX — электрическая модификация: Г — генератор; 2В — возбудитель; отсутствие знака — двигатель. ХХХ — высота оси вращения в мм; Х — условная длина сердечника якоря: S — первая длина; М — вторая длина; L — третья длина; Х — повышенная точность; отсутствие знака — нормальная точность; Г — наличие тахогенератора; Х — температурная защита; УХЛ4 — климатическое исполнение и категория размещения по ГОСТ15150. Электрические машины закрытого и обдуваемого исполнений изготавливаются по отдельным заказам с параметрами, согласованными заказчиком с изготовителем. Условия эксплуатации машин серии 4П: высота над уровнем моря — до 1000 м, температура окружающего воздуха — от 5 до 40 °С, относительная влажность воздуха до 80% при температуре 25 °С и при более низких температурах без конденсации влаги. Окружающая среда — невзрывоопасная, не содержащая токопроводящей пыли, агрессивных газов и паров в концентрациях, разрушающих металлы и изоляцию. Воздействие механических факторов внешней среды — по группе Ml ГОСТ 17516-72. С помощью формул 3.5 – 3.9 построена естественная механическая характеристика (прямая 1, на рис. 3.5).
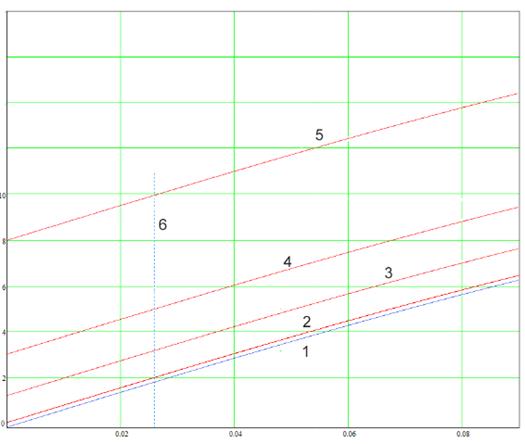
Для определения требуемой зонности регулирования, проведена прямая, соответствующая заданной скорости вращения вала двигателя (прямая 2, на рис 3.5), на которой отмечены заданные в условии моменты. В данном случае мы имеем двух зонное регулирование. ω, рад/с
Рис. 3.5 Естественная и искусственные механические характеристики Принимаем, что в первой зоне скорость вращения вала двигателя регулируется изменением напряжения на зажимах якоря. В первой зоне регулирования характеристики, при регулировании скорости вращения вала двигателя изменением напряжения на якоре, сохраняют свою жесткость, следовательно, для построения искусственных характеристик в этом случае достаточно через требуемую точку провести прямые, параллельные прямой естественной характеристики (прямые 3 и 4, на рис.3.5). Принимаем, что во второй зоне регулирование осуществляется за счет ослабления магнитного потока, создаваемого обмоткой возбуждения. Характеристики в этом случае прямолинейны, но не параллельны естественной характеристике. Регулируется скорость уменьшением магнитного потока, создаваемого обмоткой возбуждения. При построении искусственной характеристики во второй зоне (прямая 5, на рис.3.5), учитывая, что при таком способе регулирования P = const для данной характеристики, определено его значение по формуле 3.10.
Затем взято произвольное, но близкое к нулю, значение момента, и найдена еще одна точка с координатами {
Аналогично были произведены расчёты для прямой 6:
3.1. 3 Выбор тиристорного преобразователя Тиристорный преобразователь предназначен для преобразования трехфазного переменного напряжения в постоянное, и регулирования его действующего значения на активной, активно-индуктивной и активно-ёмкостной нагрузке. Регулирование осуществляется за счет изменения угла задержки отпирания силовых тиристоров.
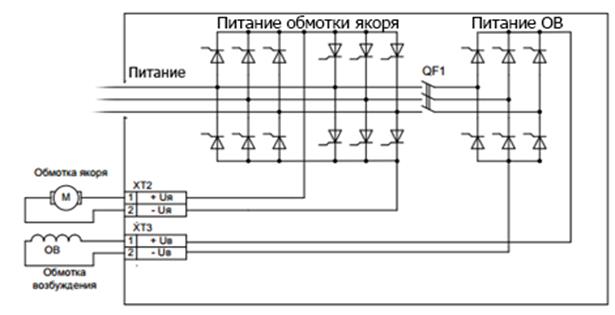
Для данного привода выбран тиристорный преобразователь компании ООО “Звезда-Электроника” ТРС-ДПТ. В одном шкафу реализованы тиристорный преобразователь реверсивный для обмотки якоря и тиристорный преобразователь нереверсивный для обмотки возбуждения. Схема подключений приведена на рис. 3.6.
Рис.3.6 Схема подключения ТРС к обмоткамДПТ НВ Данный комплектный преобразователь выбран по выходному напряжению обмоток якоря и возбуждения. Выбор ТП осуществлён по: · Регулируемому диапазону напряжений 0..500В. · По номинальному току двигателя Iном=164 А. · По перегрузочной способности: I=1,5*Iн в течении 30 сек. В данном комплектном тиристорном преобразователе реализован ряд защит: · Защита от короткого замыкания на выходе. · Защита от перегрузки длительным током. · Защита от перегрева тиристоров, которая реализована с помощью датчика температуры. · Защита от потери фазы или “слипания” фаз. · Защита от потери поля возбуждения. Технические характеристики реверсивного преобразователя приведены в таблице 3.3
Таблица 3.3
В качестве регулирующего элемента в устройстве используются тиристорные модули, каждый из которых содержит по два тиристора. Силовое напряжение для питания выпрямителя обмотки якоря подключается к клеммной колодке XT1 (cм. рис.3.6). Выход выпрямителя для питания обмотки якоря – XT2, выход для питания обмотки возбуждения – XT3(см. рис.3.6). На лицевой панели размещены элементы индикации и управления. Внешние провода и кабели для подключения напряжения сети, нагрузки и цепей управления вводятся в шкаф. Преобразователь состоит из двух выпрямителей: один предназначен для питания обмотки якоря (см. рис. 3.6), второй – для питания обмотки возбуждения. Выпрямитель питания обмотки якоря – реверсивный, он состоит из двух мостов, соединенных встречно. Выбор тахогенератора Тахогенераторы - коллекторные машины, являющиеся генераторами постоянного тока с последовательным или независимым возбуждением постоянными магнитами. Тахогенераторы ТГ постоянного тока функционально предназначены для преобразования частоты вращения вала в пропорциональное частоте выходное напряжение постоянного тока. Выходное напряжение тахогенератора используется для дистанционного измерения или индикации частоты вращения исполнительных механизмов и для выработки управляющих сигналов в системах автоматического регулирования. Крепление тахогенераторов - за корпус. Выбран тахогенератор ТГ-1. Технические данные тахогенератора см. в таблице 3.4 Таблица 3.4
Тахогенератор ТГ-1 выбран по следующим параметрам: · Номинальной частоте вращения 1100±11 об/мин, что соответствует номинальной частоте вращения вала двигателя 1070 об/мин. · Режиму работы – S1 продолжительному, что соответствует режиму работы выбранного двигателя. · По минимальной и максимальной частоте вращения вала тахогенератора 0,1 до 6000 об/мин. Данный ТГ пригоден для совместной установки с ДПТ4ПН225S,
АЭП с АДК 3.1. 5 Схема регулирования ПЧ-АД Данный АЭП с АДК реализован по системе ПЧ-АД. Функциональная схема частотного регулирования представлена на рис.3.7
Рис.3.7. Функциональная схема частотного регулирования Условные обозначения на схеме (рис.3.7): U1,В; f1, Гц - входное значение, соответственно, амплитуды питающего напряжения и частоты. Uu,В; Uf, Гц – значения, соответственно, амплитуды и частоты, поступающие с контроллера. Uвых,В; fвых,Гц - выходные значения, соответственно, амплитуды и частоты, подаваемые на обмотку статора и соответствующие заданной частоте вращения ротора. УВ - управляемый выпрямитель, который преобразовывает переменное напряжение в постоянное. УУ - управляющее устройство (может быть программируемым логическим контролером или ЭВМ), которое формирует значение амплитуды и частоты, соответствующие заданной частоте вращения ротора. УИ - управляемый инвертор, который осуществляет преобразование сформированного значения амплитуды напряжения из постоянной величины в переменную. 3.1. 6 Выбор асинхронного двигателя Исходные данные представлены в таблице 3.5[1] и на рис. 3.6.
Таблица 3.5
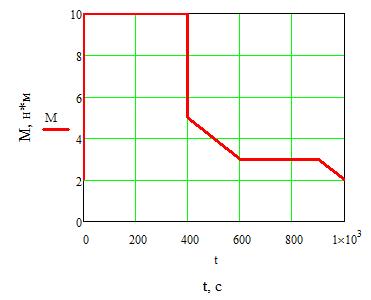
Рис. 3.6 Заданная диаграмма моментов производства механизма Для выбора двигателя построена временная диаграмма моментов, приведенная на рис. 3.7
Рис. 3.7 Временная диаграмма моментов для АЭП с АДК Определена продолжительность включения (формула 3.15): ПВ= ПВ= Определен эквивалентный момент по формуле 3.16.
Мэ= где Mi - момент в определенный промежуток времени, Н*м; ti - продолжительность данного промежутка, сек.; Σtраб - суммарное время работы двигателя, сек.; Σtn - суммарное время пауз в работе, сек; Таблица 3.7
Учитывая, что Σtnауз =0, получено: Мэ= Определена необходимая эквивалентная мощность, исходя из эквивалентного момента и заданной скорости вращения якоря:
Так как согласно варианту n= 748 об/мин, тогда по формуле (3.17)
Найдено заданное скольжение, используя формулу (3.18):
Определена номинальная мощность двигателя по формуле 3.19. Pном=(1.1-1,3)∙PЭ (3.19) Pном=(1.1-1,3)∙0.5429 кВт = (0.597 – 0.705) кВт Из полученного интервала мощностей, номинальной частоты вращения, а также по скольжению выбран двигатель, определены его номинальные значения и пусковые свойства. По справочным данным (ссылка на источник обязательна) выбран двигатель типа 4А80В8У3 со следующими данными: · Р=0,55 кВт · Синхронная частота вращения n1 = 750 об/мин · η=64% · cosφ = 0.65 · Sк= 34% · Sном= 9% · mK= 1.7 · mM= 1.2 · mП= 1.6 На основании технических данных двигателя и после преобразования формулы 3.20 получаем значение номинальной скорости вращения ротора nном.
По формуле 3.21 определяем значение номинального момента Мном.
На основании табличных значений относительных моментов mK и mП и используя формулы 3.22 и 3.32, определяем, соответственно, значения критического момента Мк и пускового момента Мп , которые необходимы для построения естественной механической характеристики.
отсюда
Построена естественная механическая характеристика (см. рис 3.8)
Рис.3.8.Естественная механическая характеристика Для определения максимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определяем во сколько раз изменится скорость для максимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной. По формуле 3.24 определяем скорость вращения ротора электродвигателя:
n2ест = (1- 0,15)683,506=580,98 об/мин
где Соответственно, при скольжении По формуле 3.25 вычислено, во сколько раз увеличилась скорость ротора для искусственной характеристики:
Так как скорость вращения ротора прямо пропорциональна частоте питающей сети, то вычислено, как увеличилась частота питающей сети, по формуле 3.26:
Так как полученная частота удовлетворяет условию Для определения минимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определено, во сколько раз изменится скорость для минимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной (на естественной характеристике двигатель работает при частоте питающей сети, равной 50Гц). По формуле 3.24 следует определена скорость вращения ротора электродвигателя:
n2ест = (1- 0,02)683,506=669,84 об/мин
где Соответственно, при скольжении Вычислено, во сколько раз уменьшилась скорость ротора для искусственной характеристики по формуле 3.27:
Вычислено, как уменьшилась частота питающей сети (формула 3.28):
Так как полученная частота удовлетворяет условию Рабочие части искусственных характеристик – прямолинейны, т.к. частотное регулирование, не зависимо от способа регулирования, сохраняет жёсткость рабочей части искусственных характеристик. Для выбора способа регулирования во второй зоне определяем величину превышения напряжения на искусственной характеристике, соответствующей максимальному моменту. Учитывая, что отношения амплитуд и частот на разных характеристиках приблизительно равны, воспользуемся отношением (формула 3.29)
где: Umax – максимальная требуемая амплитуда напряжения, В; Uном – номинальное значение напряжения питающей сети, В; fmax –максимальная выходная частота, Гц (определяется по формулам 2.12-2.14); fном – частота питающей сети, Гц.
Определив превышение напряжения в %, проверяем, удовлетворяет ли это превышение условию
Т.к. условие не выполнено, то способ регулирования – векторный с изменением только частоты питающего напряжения. Для определения требуемой зонности регулирования, вынесена в большем масштабе рабочая часть естественной характеристики (прямая 1, см рис. 3.9) на отдельный график. Затем проведена прямая, соответствующая заданному скольжению (прямая 6, см. рис. 3.9), на которой отмечены заданные в условии моменты. В данном случае имеется одно зонное регулирование (искусственные характеристики расположены только во 2-ой зоне – прямые 2,3,4,5, см. рис. 3.9).
Рис.3.9 Рабочая часть естественной и искусственных характеристик 3.1. 7. Выбор частотного преобразователя Асинхронный двигатель с короткозамкнутым ротором является сегодня самым массовым и надежным устройством для привода различных машин и механизмов. Его два основных недостатка – это невозможность простой регулировки скорости вращения ротора, очень большой пусковой ток - в пять, семь раз превышающий номинальный. Если использовать только механические устройства регулирования, то указанные недостатки приводят к большим энергетическим потерям и к ударным механическим нагрузкам. Это крайне отрицательно сказывается на сроке службы оборудования. Частотный преобразователь с широтно–импульсным управлением (ПЧ с ШИМ) снижает пусковые токи в 4-5 раз. Он обеспечивает плавный пуск асинхронного двигателя и осуществляет управление приводом по заданному закону частотного управления. Частотный преобразователь дает экономию по потреблению энергии до 50%. Появляется возможность включения обратных связей между смежными приводами, т.е. самонастройки оборудования под поставленную задачу и изменение условий работы всей системы. Двигатели российского производства на низких частотах сильно греются, это следует учитывать при выборе частотного преобразователя. Выбор осуществляется по следующим параметрам: · Мощности, большей 0,55 кВт в 1,8 раз · Напряжению, равному 400 В (380В-500В) · По номинальному току (см. формулу 3.24) Iн= Рн/(Uн·√3·ηн·cosφ) (3.24) Iн= 550/ 380*1.7*0.64*0,65=2,8А · По типу защиты: o Защита от перегрева привода o Исчезновение фазы на входе привода o Исчезновения фаз двигателя привода o Короткое замыкание между фазами двигателя привода o Сверхток между выходной фазой и землей (только при включенном питании) привод o Тепловая защита двигателя o Функция защиты от значительного уменьшения напряжения фазного питания привода o Цепи защиты от повышенного и пониженного напряжения линии питания привода Выбран преобразователь частоты ATV312 1 кВт 500В 3ф, произведённый фирмой Schneider Electric (ссылка на источник обязательна). Каталожный номер: ATV312H055N4. Технические характеристики (см. табл.3.8) удовлетворяют характеристикам выбранного двигателя. Преобразователь Altivar 12 наряду с традиционными для такого класса ПЧ функциями располагает также следующими функциональными возможностями: · переключение между локальным управлением и управлением через клеммник; · законы управления двигателем: скалярный, векторный и квадратичный; пропуск частотного окна; · заданные скорости; · ПИД-регулятор; · S- и U-образные кривые разгона-торможения, переключение темпов разгона-торможения; · остановка на выбеге и быстрая остановка; · пошаговая работа (JOG); · конфигурирование аналоговых и дискретных входов; · контроль недогрузки и перегрузки; · отображение состояния дискретных входов на экране ПЧ; конфигурирование отображения пара
Таблица 3.8
Законы регулирования: Возможен выбор одного из 3 законов управления двигателем в зависимости от применения: Скалярный закон (U/f-регулирование): простой закон управления двигателем с поддержанием постоянного соотношения между напряжением и частотой питания двигателя и возможностью подстройки этого соотношения на нижней скорости. Предназначен для небольших конвейеров, параллельно включенных двигателей и т.д. Векторный закон (векторное управлени
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 894; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.247.170 (0.018 с.) |

 (2.12)
(2.12) - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике.
- величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике. .
. (2.13)
(2.13) (2.14)
(2.14) , то потери на намагничивание статора будут значительно сокращать срок службы двигателя.
, то потери на намагничивание статора будут значительно сокращать срок службы двигателя. (2.15)
(2.15) (2.16)
(2.16) , то потери на нагрев обмоток ротора будут значительно сокращать срок службы двигателя.
, то потери на нагрев обмоток ротора будут значительно сокращать срок службы двигателя. ; (2.17)
; (2.17) (2.18)
(2.18)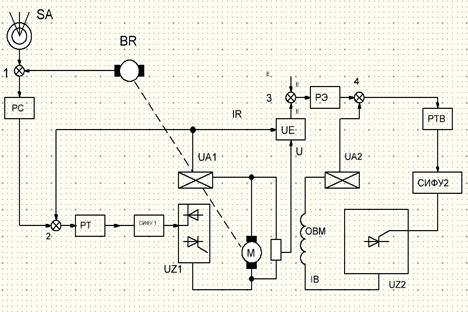 Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием.
Данный АЭП с ДПТ НВ реализован по системе ТП-Д с двух зонным регулированием.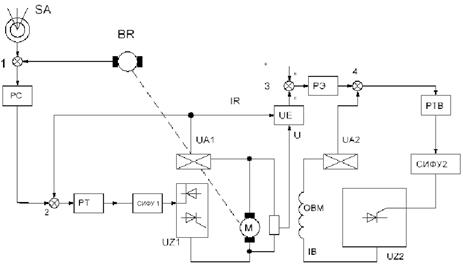
 (3.1)
(3.1)
 , учитывающий продолжительность включения двигателя, выбирается из таблицы 3.2:
, учитывающий продолжительность включения двигателя, выбирается из таблицы 3.2: Н*м (3.2)
Н*м (3.2) Н*м
Н*м (3.3)
(3.3)

 (3.5)
(3.5) (3.6)
(3.6)
 (3.7)
(3.7) (3.8)
(3.8)
 (3.9)
(3.9)

 (3.10)
(3.10)
 }.
}.
 (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)

 (3.15)
(3.15)
 (3.16)
(3.16) Н*м
Н*м , кВт (3.16)
, кВт (3.16)
 (3.18)
(3.18)
 , % (3.20)
, % (3.20)
 (3.21)
(3.21)
 (3.22)
(3.22)
 (3.23)
(3.23)


 (3.27)
(3.27)
 (3.29),
(3.29),
 :
: