
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Конструкція синхронних реактивних двигунівСодержание книги
Поиск на нашем сайте
Існує велика кількість виконань синхронних реактивних машин. Статор реактивного двигуна виконується так, як і в асинхронній мікромашині. У двигунах загального використання у зв'язку з відносно великими потужностями розповсюджена трифазна розділена статорна обмотка. В мікромашинах малої потужності, які живляться від однофазної мережі статорна обмотка вмикається як трифазна в однофазному режимі з пусковою, а іноді – й з робочою, ємністю, або виконується двофазною. Іноді застосовують зосереджену обмотку. Такі двигуни працюють в основному в пристроях синхронного зв'язку. В найменших машинах в деяких випадках застосовують зосереджену обмотку з екранованими полюсами.
а) б)
в) г) Рис. 12.8. Варіанти конструкції ротора СРД
Ротор двигуна може бути різного конструктивного виконання (рис. 12.8). Для покращення властивостей СРД необхідно, щоб магнітна провідність повітряного зазору за поздовжньою віссю значно перевищувала магнітну провідність за поперечною віссю. Найбільш розповсюджені ротори із западинами (рис. 12.8, а), з суцільного феромагнітного матеріалу (рис.12.8, б), секціонований (рис.12.8,в), з овальними пазами (рис. 12.8, г). В роторах рис. 12.8 а, г убудована пускова біляча клітка, яка виконує демпфуючі функції при обертанні ротора. Вона виготовляється з алюмінію або мідних стержнів, з'єднаних короткозамикаючими кільцями. Ротор рис. 12.8, б застосовується в двигунах, призначених для пуску без навантаження. Пусковий момент У роторі із западинами Іноді СРД виготовляють з асинхронного двигуна. При цьому статор залишають без змін, а в роторі вифрезеровують частину стержнів короткозамкненої обмотки. Потужність такого СРД становить 35 – 40 % від асинхронного з гіршими ККД та
Пуск СРД
Пуск СРД при наявності пускової білячої клітки здійснюється безпосереднім вмиканням у мережу. Наближено пуск аналогічний пускові асинхронного двигуна. При малих ковзаннях електродвигун втягується в синхронізм під дією реактивного моменту. Не дивлячись на те, що процеси пуску асинхронного й синхронного реактивного двигунів мають багато спільного, вони мають свої особливості, оскільки при пуску СРД
Рис. 12.9. Моменти СРД при асинхронному пуску Тому при пуску під навантаженням для забезпечення втягування двигуна в синхронізм необхідно додержуватись умови:
Коливання ротора СРД
СРД розраховані на роботу зі змінним моментом навантаження При зміні моменту Ці коливання особливо негативно виявляються при використанні СРД в системах синхронного зв’язку й звукозапису. Заходами для усунення коливань є такі: а) правильний вибір моменту інерції ротора; б) виготовлення на роторі демпфуючої білячої клітки; в) збільшення
Однофазні й двофазні СРД
Однофазний СРД може виконуватись при різній конструкції як ротора, так і статора. Статор може виконуватись з двофазною обмоткою, з робочим та пусковим конденсаторами. Якщо ротор виконано з білячою кліткою, то виникає асинхронний обертаючий момент, вираз для якого складніший, ніж для асинхронного двигуна. Це пояснюється тим, що
Рис. 12.10. Схема вмикання однофазного СРД Інший варіант однофазного реактивного двигуна наведено на рис. 14.10. Статор і ротор виконуються вно полюсними. На стоторі р=1, а на роторі
де р – число пар полюсів. Після ручного поштовху в потрібному напрямі ротор досягає синхронної швидкості. У подальшому відбувається періодичне магнітне притягання відповідних пар виступів ротора до двох полюсів статора, що забезпечує, зважаючи на механічну інерцію, обертання зі швидкістю
Редукторний двигун
Часто в системах автоматики, особливо з високочастотними джерелами живлення, виникає необхідність одержання швидкості Редукторний реактивний двигун, розроблений інженерами фірми Вестінгуаз Чеббом (L. W. Chubb) та Уотсом (T. R. Watts), дозволяє одержати будь-яку малу швидкість обертання при живленні від мережі зі стандартною частотою без допомоги механічних пристроїв. У зв'язку з цим двигун названо «редукторним». В його повітряному зазорі створюється обертове магнітне поле. Особливістю двигуна є те, що Редукторні двигуни можуть виконуватись зі збудженням на статорі або роторі, з постійними магнітами або без збудження (реактивні). В залежності від розташування обмотки збудження або постійних магнітів розрізняють двигуни з осьовим або радіальним збудженням. Статор тороїдної форми та циліндричний ротор реактивного редукторного двигуна набирають з листів електротехнічної сталі. На внутрішній поверхні статора й зовнішній ротора є напівкруглі пази. Числа пазів статора Розглянемо принцип дії редукторного двигуна з багатофазною обмоткою (рис.12.11).
Рис. 12.11. Конструктивна схема редукторного двигуна
Якщо магнітний потік має просторове положення
У зв'язку з магнітним притяганням ротор повертається таким чином, щоб співпала осі зубців 2, 2' та 5, 6'. Відбувається поворот на кут
Але
Враховуючи в (12.22) формули (12.21), (12.23), одержимо:
В такому разі
Тоді зі співвідношення (12.25):
З формули (12.26):
де Оскільки
З формули (12.27) та (12.28) одержимо:
Зі співвідношення (12.29) видно, що при Якщо виконувати двигун з Тому
де К=1, 2… Якщо Редукторні двигуни можливо виконувати з редукуванням у кілька ступенів, якщо встановити кілька роторів, розміщених один в одному, з певною кількістю пазів на зовнішній та внутрішній поверхнях. Пуск в хід редукторних двигунів здійснюється або короткозамкненою обмоткою на роторі (при відносно великих швидкостях), або безпосереднім вмиканням в мережу без пускової обмотки (при малих швидкостях). В останньому випадку двигун втягується в синхронізм за рахунок малого моменту інерції ротора й реактивного моменту. Ці двигуни виконуються на У зв'язку з малою швидкістю обертання двигуни не потребують особливого догляду. Їхніми перевагами є рівномірне обертання на протязі одного оберту й практична відсутність коливань ротора, що має велике значення в системах звукозапису та звуковідтворення. В електропрогравачах інколи застосовують однофазні редукторні двигуни з
Але
При випаданні з синхронізму ротор зупиняється. Для згладжування нерівномірної швидкості обертання ротор виконують хв.інім з великим моментом інерції. При
Гістерезисні двигуни
Конструктивно гістерезисний двигун побудований таким чином. Статор, як і у виконавчому асинхронному двигуні, може бути двофазним або трифазним з розподіленою обмоткою або однофазним із зосередженою обмоткою та явнополюсними екранованими полюсами. Ротор виконується у вигляді циліндра або диску без обмотки з великим залишковим магнітним полем. Для того, щоб це поле було достатньої величини, ротор виготовляється з магнітотвердого (з широкою петлею гістерезису) матеріалу (вікаллой, альні і т. і.).
Рис. 12.12. Складений ротор гістерезисного двигуна
Для економії вартісного магнітотвердого матеріалу ротор виконується складеним (рис.12.12). Циліндр 1 з магнітотвердого матеріалу насаджують на феромагнітну або не магнітну втулку 2, яка сидить на валу 3. Циліндр може бути суцільним або шихтованим з окремих ізольованих пластин. Іноді однофазні синхронні гістерезисні двигуни виконують оберненої конструкції, тобто із зовнішнім ротором та внутрішнім статором. Така конструкція застосовується в гіроскопічних пристроях, електропрогравачах, радіолах і т. д. Гістерезисні двигуни гіроскопічних пристроїв будуються з потужностями у кілька десятків ват з підвищеними частотами мережі й швидкостями обертання n=24000-30000 об/хв й більше. Крім того, ці двигуни застосовуються в пристроях звукозапису, самописних приладах, електричних годинниках і т. д. Вони мають потужність від кількох одиниць до 2000 Вт при напругах 115-127 В та частотах мережі 50-500 Гц. Розглянемо принцип дії двигуна. Якщо двигун увімкнути до мережі, то він створює результуючий обертаючий момент
Природа вихрового моменту
Рис. 12.13. Залежність вихрового моменту від ковзання
З цього графіка:
де У двигунів з шихтованим ротором практично Природу гістерезисного моменту можливо пояснити таким чином. Причиною його виникнення є обертове перемагнічування й молекулярне тертя, яке створює широку петлю гістерезису. При обертовому перемагнічуванні відбувається поворот (обертання) основного поля (полюси
Рис. 12.14. Принцип виникнення гістерезисного моменту
Елементарні магнітики N – S у зв'язку з молекулярним тертям в матеріалі ротора не встигають повертатись за
яка й створює обертаючий момент. Кут
де
Якщо навантаження зменшити, то стане
двигун зупиниться. Зміна
пояснюється зміною ширини робочої петлі гістерезису, тобто переходом процесу обертового перемагнічування на вужчу петлю. За своєю природою кут
де С – конструктивна стала машини;
Кут
Зі співвідношень (12.33), (12.34):
Рис. 12.15. Залежність гістерезисного моменту від ковзання
Чим ширша петля гістерезису, тим більші Залежність Результуюча крива
Рис. 12.16. Залежність результуючого моменту від ковзання
Якщо Розглянемо, як змінюються потужності в процесі розгону (рис.12.17). Оскільки
Рис. 12.17. Залежність потужності від ковзання при розгоні двигуна
Але від
З виразу (12.41) видно, що з переходом двигуна в асинхронний режим (
Рис. 12.18. Петля гістерезису Знаючи
Оскільки залежність Н від В нелінійна, вирішення інтегралу (12.43) суттєво ускладнюється. Тому для визначення
Наявність у кривій розподілу Синхронні гістерезисні двигуни мають позитивні якості. Вони створюють великі пускові моменти й момент входу в синхронізм Тому ці двигуни можуть ефективно використовуватись у повторно-короткочасному режимі. Вони прості за конструкцією, надійні в експлуатації, працюють безшумно у зв'язку з гладким ротором; мають властивість полісинхронізму, тобто здатність зберігати робочі й пускові характеристики при різних синхронних швидкостях ( До недоліків цих двигунів належать підвищена схильність до коливань ротора, особливо, якщо він шихтований, та висока вартість і дефіцитність магнітотвердих матеріалів.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 408; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.205.149 (0.017 с.) |

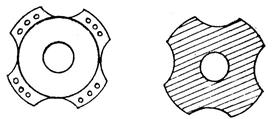

 в ньому створюється взаємодією обертового магнітного поля статора з вихровими струмами, які наводяться в осерді ротора. Секціонований (шаруватий) ротор рис. 14.8, в виконується з алюмінію, пластмаси або іншого немагнітного матеріалу, в який закладаються сталеві секції (смуги). Якщо ротор виконується з алюмінію, то смуги цього матеріалу відіграють роль білячої клітки.
в ньому створюється взаємодією обертового магнітного поля статора з вихровими струмами, які наводяться в осерді ротора. Секціонований (шаруватий) ротор рис. 14.8, в виконується з алюмінію, пластмаси або іншого немагнітного матеріалу, в який закладаються сталеві секції (смуги). Якщо ротор виконується з алюмінію, то смуги цього матеріалу відіграють роль білячої клітки. =2.5-3.5. Тому в цьому разі пусковий момент
=2.5-3.5. Тому в цьому разі пусковий момент  .
. й магнітні провідності
й магнітні провідності  . Під час пуску СРД магнітний потік прослизає відносно ротора. Тому магнітний опір потокові періодично (з частотою ковзання) змінюється. Найбільшим він буде при співпаданні осі потоку з поперечною віссю машини, а найменшим – з подовжньою. Тому магнітний потік у процесі ковзання в залежності від кута між своєю віссю й віссю ротора змінює свою величину, тобто поле стає еліптичним. У зв'язку з цим виникає момент зворотної послідовності, особливо спотворюючи криву
. Під час пуску СРД магнітний потік прослизає відносно ротора. Тому магнітний опір потокові періодично (з частотою ковзання) змінюється. Найбільшим він буде при співпаданні осі потоку з поперечною віссю машини, а найменшим – з подовжньою. Тому магнітний потік у процесі ковзання в залежності від кута між своєю віссю й віссю ротора змінює свою величину, тобто поле стає еліптичним. У зв'язку з цим виникає момент зворотної послідовності, особливо спотворюючи криву  при швидкості
при швидкості  , тобто S=0.5 (рис. 12.9).
, тобто S=0.5 (рис. 12.9).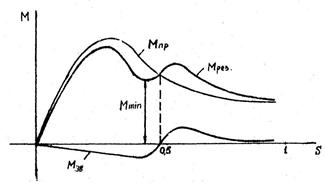
 .
. (змінним статичним моментом
(змінним статичним моментом  ). Крім того, вони застосовуються при постійній частоті
). Крім того, вони застосовуються при постійній частоті  (звукозапис, телебачення і т. д.) та змінній
(звукозапис, телебачення і т. д.) та змінній  (синхронний зв’язок). В останньому випадку змінюється
(синхронний зв’язок). В останньому випадку змінюється  . Зміна синхронної швидкості
. Зміна синхронної швидкості  або швидкості
або швидкості  , що викликає деякий надлишковий позитивний або негативний момент, величина якого визначається моментом інерції ротора й пов’язаних з ним обертових частин механізму, який приводиться до руху.
, що викликає деякий надлишковий позитивний або негативний момент, величина якого визначається моментом інерції ротора й пов’язаних з ним обертових частин механізму, який приводиться до руху. , тобто збільшення крутості початкової частини кутової характеристики.
, тобто збільшення крутості початкової частини кутової характеристики.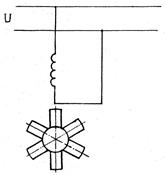
 . Потужності таких двигунів – до кількох ват. Вони використовуються, наприклад, для привода розподільника телеграфного апарату і т. д. Двигун не має пускового моменту й тому зрушується до руху поштовхом рукою. При цьому
. Потужності таких двигунів – до кількох ват. Вони використовуються, наприклад, для привода розподільника телеграфного апарату і т. д. Двигун не має пускового моменту й тому зрушується до руху поштовхом рукою. При цьому
 . При механічному перевантаженні двигуна (
. При механічному перевантаженні двигуна ( ) відбувається його випадання з синхронізму й зупинка. Такий двигун дуже схильний до коливань ротора.
) відбувається його випадання з синхронізму й зупинка. Такий двигун дуже схильний до коливань ротора. Досягають цього встановленням між валами двигуна та приводного механізму знижуючих багатоступінчастих редукторів. У зв'язку зі збільшенням механічних втрат в цьому разі ККД привода зменшується, а в експлуатації внаслідок зносу зубчастих коліс виникають додаткові шуми.
Досягають цього встановленням між валами двигуна та приводного механізму знижуючих багатоступінчастих редукторів. У зв'язку зі збільшенням механічних втрат в цьому разі ККД привода зменшується, а в експлуатації внаслідок зносу зубчастих коліс виникають додаткові шуми. . Використовуючи цю властивість, фірма Вестінгауз створила макет електричного годинника, в якому секундна, хвилинна та годинна стрілки приводились до руху безпосередньо валом двигуна без механічного редуктора.
. Використовуючи цю властивість, фірма Вестінгауз створила макет електричного годинника, в якому секундна, хвилинна та годинна стрілки приводились до руху безпосередньо валом двигуна без механічного редуктора. та ротора
та ротора  не дорівнюють одне одному. Спіральна обмотка статора може виконуватись у двофазному або трифазному варіантах.
не дорівнюють одне одному. Спіральна обмотка статора може виконуватись у двофазному або трифазному варіантах.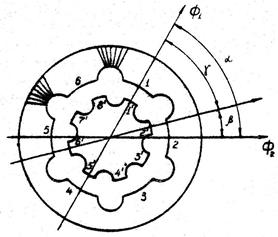
 , то зубці 1 та 1; 4 та 5' притягаються один до одного та їхні осі співпадають. Наступного моменту часу магнітний потік займе положення
, то зубці 1 та 1; 4 та 5' притягаються один до одного та їхні осі співпадають. Наступного моменту часу магнітний потік займе положення  , тобто повернеться на кут
, тобто повернеться на кут (12.21)
(12.21) . (12.22)
. (12.22) (12.23)
(12.23) (12.24)
(12.24) (12.25)
(12.25) (12.26)
(12.26) (12.27)
(12.27) - коефіцієнт редукції.
- коефіцієнт редукції. (12.28)
(12.28) (12.29)
(12.29) зі зменшенням
зі зменшенням  та збільшенням
та збільшенням  швидкість
швидкість  зменшується. Звичайно
зменшується. Звичайно 
 , то ротор обертається за напрямом поля, а при
, то ротор обертається за напрямом поля, а при  – проти.
– проти. Вт;
Вт;  %. Наявність білячої клітки знижує ККД двигуна.
%. Наявність білячої клітки знижує ККД двигуна. . Оскільки у такого двигуна пусковий момент
. Оскільки у такого двигуна пусковий момент  =0, він розкручується до подвоєної синхронної швидкості. При цьому в момент збільшення пульсуючого потоку всі зубці ротора притягаються до зубців статора. Коли потік спадає, диск ротора повертається далі по інерції. За період зміни магнітного потоку зубці два рази притягаються один до одного, тому швидкість обертання ротора:
=0, він розкручується до подвоєної синхронної швидкості. При цьому в момент збільшення пульсуючого потоку всі зубці ротора притягаються до зубців статора. Коли потік спадає, диск ротора повертається далі по інерції. За період зміни магнітного потоку зубці два рази притягаються один до одного, тому швидкість обертання ротора: , тому:
, тому: (12.30)
(12.30) та
та  Гц,
Гц, 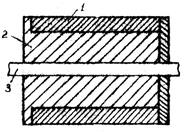
 (12.31)
(12.31) така ж, як у розглянутих виконавчих асинхронних двигунів з порожнистим ротором. При ковзанні S=1 момент
така ж, як у розглянутих виконавчих асинхронних двигунів з порожнистим ротором. При ковзанні S=1 момент 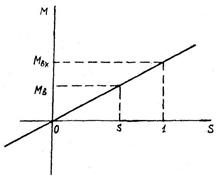
 (12.32)
(12.32) - момент при короткому замкненні (пусковий).
- момент при короткому замкненні (пусковий). . При ковзанні
. При ковзанні  машина переходить в режим генератора.
машина переходить в режим генератора. на рис.12.14).
на рис.12.14).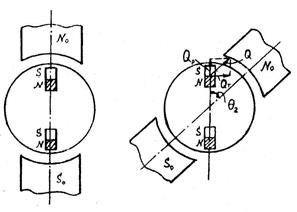
 . Чим більше молекулярне тертя (ширша петля гістерезису), тим більше
. Чим більше молекулярне тертя (ширша петля гістерезису), тим більше 
 ,
, - статичний момент навантаження на валу,
- статичний момент навантаження на валу, - гістерезисний момент.
- гістерезисний момент. . При ідеальному холостому ході
. При ідеальному холостому ході  =0. При навантаженні
=0. При навантаженні
 (12.33)
(12.33) , (12.34)
, (12.34) - магнітний потік, створюваний ротором;
- магнітний потік, створюваний ротором; - МРС статора.
- МРС статора.
 (12.35)
(12.35)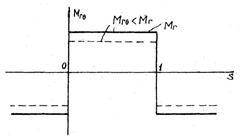
 . Тому в якості матеріалу ротора й застосовують магнітожорсткі матеріали.
. Тому в якості матеріалу ротора й застосовують магнітожорсткі матеріали. наведена на рис. 12.15. При
наведена на рис. 12.15. При  і машина переходить в режим генератора.
і машина переходить в режим генератора.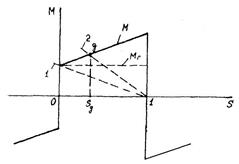
 змінюється за характеристикою 1, тобто завжди в діапазоні
змінюється за характеристикою 1, тобто завжди в діапазоні 
 , то двигун розганяється і в усталеному режимі при S=0 обертається з синхронною швидкістю. Якщо ж
, то двигун розганяється і в усталеному режимі при S=0 обертається з синхронною швидкістю. Якщо ж  двигун розганяється, а в точці g двигун може працювати з усталеною асинхронною швидкістю. При подальшому збільшенні
двигун розганяється, а в точці g двигун може працювати з усталеною асинхронною швидкістю. При подальшому збільшенні  двигун зупиниться. Отже, при
двигун зупиниться. Отже, при  двигун може працювати тільки як синхронний.
двигун може працювати тільки як синхронний. , то й електромагнітна потужність
, то й електромагнітна потужність  не залежить від швидкості
не залежить від швидкості  (12.36)
(12.36) (12.37)
(12.37) . (12.38)
. (12.38)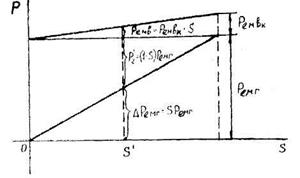
 (в тому числі й механічні втрати) та втрати на гістерезис, які переходять в тепло
(в тому числі й механічні втрати) та втрати на гістерезис, які переходять в тепло  :
: ; (12.39)
; (12.39) ; (12.40)
; (12.40) ; (12.41)
; (12.41) . (12.42)
. (12.42) ) втрати в ньому різко зростають.
) втрати в ньому різко зростають.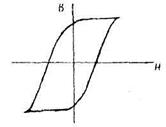
 . (12.43)
. (12.43) застосовують відомі із загального курсу машин напівемпіричні формули. Тоді:
застосовують відомі із загального курсу машин напівемпіричні формули. Тоді: (12.44)
(12.44) (12.45)
(12.45) вищих гармонічних (від зубцевих гармонік) погіршує характеристики двигуна. Тому застосовують двошарові статорні обмотки зі скороченим кроком, пази виконують закритими.
вищих гармонічних (від зубцевих гармонік) погіршує характеристики двигуна. Тому застосовують двошарові статорні обмотки зі скороченим кроком, пази виконують закритими. в межах
в межах  ). Тому можливо створювати якісні багатошвидкісні гістерезисні двигуни. У них ККД досягає 60%, а
). Тому можливо створювати якісні багатошвидкісні гістерезисні двигуни. У них ККД досягає 60%, а  . Ці характеристики можуть бути покращені підмагнічуванням ротора за допомогою короткочасного (2-3 періоди) підвищення мережевої напруги
. Ці характеристики можуть бути покращені підмагнічуванням ротора за допомогою короткочасного (2-3 періоди) підвищення мережевої напруги  . В цьому випадку ротор більше намагнічується та, як і звичайна синхронна машина, двигун споживає менший реактивний струм з мережі. Тому підвищується ККД й
. В цьому випадку ротор більше намагнічується та, як і звичайна синхронна машина, двигун споживає менший реактивний струм з мережі. Тому підвищується ККД й  . Причому
. Причому 


