
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вимоги до виконавчих мікроелектродвигунівСодержание книги
Поиск на нашем сайте
Вимоги, які ставляться до електродвигунів автоматичних систем, залежать від електричної або структурної схеми автоматичної системи, її призначення й тих функцій, які повинен виконувати електродвигун [34-38]. Основні з цих вимог такі: 1) статична стійкість та лінійність механічних характеристик в усьому робочому діапазоні швидкостей; 2) лінійна залежність швидкості обертання ротора від електричного сигналу керування в усьому робочому діапазоні; 3) відсутність самоходу (обертання при відсутності сигналу керування); 4) швидкодія; 5) великий коефіцієнт підсилення потужності у зв'язку з обмеженою потужністю джерел сигналу керування; 6) великий пусковий момент; 7) експлуатаційна надійність; 8) відсутність радіозавад; 9) малі габарити й маса; 10) широкий діапазон регулювання швидкості обертання; 11) низька вартість; 12) високі енергетичні характеристики; 13) безшумність роботи; 14) мінімальний сигнал зрушення.
10.3.1. Статична стійкість та лінійність механічних характеристик
Розглянемо цю вимогу на прикладі механічних характеристик асинхронного двигуна (рис. 12.1).
Рис. 10.1. Механічні характеристики асинхронних двигунів Характеристика 1 стосується нормального асинхронного двигуна звичайного виконання. Характеристика 2 стосується двигуна з підвищеним опором ротора. Якщо двигун працює в точці К, то, при зменшенні швидкості обертання зменшується й момент, що викликає нове зменшення швидкості аж до зупинки двигуна, тобто двигун у цій точці працює нестійко. Якщо двигун працює в точці К', то зменшення швидкості викликає збільшення моменту, тобто двигун відновлює швидкість обертання, тому робота в цій точці стійка. Робота двигуна з характеристикою 2 стійка в усьому діапазоні швидкостей. Таким чином, критерієм швидкості є вимога
тобто позитивному Умова стійкості роботи стосовно асинхронного двигуна може бути виражена, як
де Звичайно для реальних виконавчих асинхронних двигунів
Рис. 10.2. До визначення степеня не лінійності
Однією з найважливіших особливостей механічних характеристик виконавчих асинхронних двигунів є принципова нелінійність. Зі збільшенням активного опору ротора нелінійність зменшується.
Нелінійність механічної характеристики оцінюють степенем нелінійності (рис. 10.2):
або частинним критерієм лінійності (рис. 10.3):
Рис. 10.3. До визначення частинного критерію лінійності
В останньому випадку прямою аб замінюється нелінійна крива в робочому діапазоні швидкостей Частинний критерій лінійності можливо застосовувати й для оцінки лінійності регулювальної характеристики (залежність швидкості обертання ротора від сигналу керування).
Самохід виконавчих двигунів
Самоходом виконавчого двигуна називають явище обертання ротора при відсутності керуючого сигналу. При наявності самоходу двигун втрачає керованість і не може використовуватись як виконавчий. Вимога відсутності самоходу в основному стосується асинхронних виконавчих двигунів, оскільки двигуни постійного струму звичайно самоходу не мають. В асинхронному виконавчому двигуні найбільша асиметрія магнітного поля виникає при відсутності сигналу керування, тобто при однофазному вмиканні. Розкладаючи пульсуюче поле на пряме й зворотне, можливо одержати пряму
Рис. 10.4. Моменти при однофазному вмиканні двигуна зі звичайним ротором
В однофазному двигуні пусковий результуючий момент Щоб двигун не втрачав керованості і зупинявся в однофазному режимі, необхідно, щоб при Розрізняють параметричний та технологічний самохід. Параметричний самохід обумовлений малим активним опором ротора, тому ротор в асинхронних виконавчих двигунах виготовляється з підвищеним активним опором.
Рис. 10.5. Моменти асинхронного двигуна з підвищеним активним опором ротора
Це зменшує ККД виконавчого двигуна, але гарантує його керованість і наближає механічні характеристики до прямолінійних. При цьому Технологічний самохід викликаний створенням паразитних короткозамкнених витків у магнітному ланцюзі або обмотці. Тому повинна ставитись підвищена вимога до якості технологічних операцій при виготовленні виконавчих двигунів.
Швидкодія
Час розгону виконавчого двигуна визначається, перш за все, електромеханічними перехідними процесами, оскільки електромагнітні перехідні процеси проходять значно швидше. Електромеханічна стала часу
одержимо
Стала часу Величину
Рис. 10.6. Лінеаризована характеристика двигуна
Будемо виходити з лінеаризованої характеристики
визначається моментом двигуна:
Підставляючи в (10.2) з (10.1), одержимо:
де електромеханічна стала часу
Після інтегрування й перетворювань з рівняння (10.3):
За формулою (10.5) будується графік ω(t), наведений на рис.10.7.
Рис. 10.7. Процес розгону двигуна
У зв'язку з тим, що в процесі розгону момент М зменшується, час розгону
Таким чином,
Тому
Таблиця 10.1 Електромеханічні сталі часу виконавчих двигунів.
Відсутність радіозавад
Особливо інтенсивними джерелами радіозавад є колекторні машини. Завади з'являються у зв'язку зі швидкими змінами струму в комутуючих секціях, а також внаслідок пульсацій ЕРС та струму якоря. Ці пульсації передаються в мережу й приймачі, які від неї живляться, і створюють вищі гармоніки струму й напруги, які шкідливо впливають на роботу різних приймачів, пристроїв зв'язку і автоматики, розташованих поблизу (додаткові втрати, наднапруги, спотворення вхідного сигналу і т. д.).
Звичайно, за діючими нормами, найнижчою частотою радіозавад, починаючі з якої слід виконувати захист, є 150 кГц. Але гармонічні складові, які викликаються пульсацією ЕРС, звичайно мають частоту, яка не більша від 25 кГц. Тому вони не можуть бути джерелом радіозавад. Від них слід захищати лише мережу та приймачі, що живляться від мережі. Значно небезпечніше за створенням радіозавад іскріння під щітками, яке створює безперервний спектр високочастотних коливань. Радіозавади впливають тим сильніше, чим більше смуга пропускання радіоприймального пристрою. Для захисту від радіозавад та завад у мережі в машинах малої потужності застосовують такі заходи: 1) екранування; 2) симетрування обмоток машин з послідовним та змішаним збудженням; 3) установлення блокувальних конденсаторів, які шунтують на корпус машини проводи мережі або фільтровий провід; 4) електричні фільтри. Екранування дієве при захисті від радіозавад, але мало ефективне для заглушення гармонічних, викликаних пульсацією ЕРС якоря. За наявністю близько розташованих радіоприймальних пристроїв електрична машина повністю екранується. Звичайно роль такого екрану виконує корпус машини, на який з боку колектора надівають захисний ковпак, який екранує колектор. Вся проводина виконується екранованим дротом, екран якого з'єднується з корпусом машини. З корпусом також з'єднуються за допомогою додаткової щітки вали, які мають велику поверхню, які виходять зовні і створюють значні завади. Для машин з послідовним та мішаним збудженням ефективним методом заглушення радіозавад є симетрування обмоток збудження, яке полягає в тому, що послідовна обмотка поділяється на дві частини, увімкнені з різних боків якоря. Вищі гармонічні можуть проходити різними контурами. Іноді вони проходять контуром, в який входить тільки один провід мережі (зворотний шлях проходить через корпус), і викликають несиметричні завади. Іноді в контур входять обидва проводи мережі, що викликає симетричні завади. Еквівалентний високочастотний опір мережі сильно відрізняється від опору тих приймачів, які до неї увімкнені. Такий опір звичайно створює ємність між проводами, окремими деталями й корпусом. Аналітичне визначення цього опору утруднене й тому виконується експериментально на об'єкті, який захищається.
Рис. 10.8. Схема вмикання блокувальних конденсаторів
Дієвим заходом для захисту від симетричних та несиметричних завад є застосування блокувальних конденсаторів (рис.10.8). На рис. 10.8. конденсатор
Рис. 10.9. Схема вмикання електричних фільтрів для заглушення завад
Найефективнішим способом заглушення завад є використання електричних фільтрів. Фільтр повинен безперешкодно пропускати постійну складову напруги або струму й затримувати за можливістю всі гармонічні. Для досягнення цієї мети застосовують ріжучі фільтри низької частоти – Г-подібні та П-подібні. Найкращі результати дає застосування П-подібного фільтру (рис. 10.9), тому він використовується для відповідальних установок. В деяких випадках ефективність схем заглушення завад підвищують блокуванням щіток на корпус машини конденсаторами. В особливо важливих випадках застосовують багатоланкові комбіновані фільтри. Елементи фільтру розміщуються в екранованій коробці, яка розташовується на корпусі машини, причому розміри коробки досить часто сумірні з розмірами машини. Якщо ж машина убудовується всередину якогось пристрою, то для розміщення елементів фільтру використовують наявні вільні місця. При цьому елементи того ж самого фільтру можуть розташовуватись у різних місцях, але обов'язково всередині захисного кожуха, який відіграє роль екрану.
Безшумність роботи
При роботі електричних машин малої потужності створюється різний за характером та природою шум. При цьому рівень гучності шуму залежить від акустичних властивостей машини й приміщення, від частотного складу тонів у спектрі шуму. Акустичні властивості машини визначаються її здатністю випромінювати звук в оточуючий простір, а властивості приміщення характеризуються здатністю стін, стелі й підлоги до звукопоглинання. Людське вухо сприймає коливання з частотами від 16-20 Гц до 16000-20000 Гц. Рівень гучності шуму Г вимірюється децибелами:
де р – звуковий тиск, Н/см²;
Шумність машини визначається величиною Г. За цією величиною з урахуванням практично можливої шумності приміщення всі електричні машини розділяють на такі: а) безшумні - Г< 35 дб; б) малошумні – 35 дб< Г < 55 дб; в) нормальні – 55 дб < Г < 75 дб. За своєю природою розрізняють механічний, вентиляційний та магнітний шуми. Механічний шум викликається вібраціями окремих частин машини у зв'язку з не точним балансуванням ротора, поведінкою підшипників, роботою щіткових контактів. Для зменшення механічного шуму необхідне ретельне динамічне балансування ротора та збільшення жорсткості валу. Підшипники ковзання створюють менший шум, ніж підшипники котіння. Зменшення щіткового шуму може бути досягнуте якісним виготовленням колектора або кілець з точно циліндричною, гладкою поверхнею, масивною конструкцією щіткотримачів та ретельним притиранням щіток. Вентиляційний шум викликається коливаннями тиску повітряного потоку, який охолоджує машину, інтенсивним вихростворенням, пов'язаним з високими місцевими швидкостями повітря.
Для зменшення вентиляційного шуму необхідно виконувати вентилятор з простим числом лопаток: 13, 17, 19, 23 і т. д.; збільшувати радіальний зазор між зовнішім діаметром вентилятора й підшипниковим щитом, збільшувати жорсткість вентилятора й ретельно його балансувати і т. д. В цьому смислі найкраща вентиляція – аксіальна нагнітальна. Магнітний шум викликається періодичними деформаціями частин машини під дією змінних магнітних сил. У загальному випадку ці сили можуть мати радіальні, тангенціальні та аксіальні складові. Під їхньою дією відбуваються радіальні, скручуючі, розтягуючі та згинаючі вібрації станини машини. В універсальних колекторних двигунах при живленні від мережі змінного струму виникає більший шум, ніж у випадку живлення від мережі постійного струму. Це пояснюється періодичними змінами основного магнітного потоку полюсів. Зменшення магнітного шуму досягають вибором
!0.3.6 Інші вимоги
У порівнянні з виконавчими двигунами постійного струму регульовані асинхронні двигуни мають меншу вартість та більш надійні. Їхніми недоліками у порівнянні з двигунами постійного струму є великі габарити та менший ККД. Однією з суттєвих характеристик є керуючий сигнал зрушення. Якщо сигналом є напруга, то – це напруга зрушення
Контрольні запитання 1. Де, для чого та які електричні мікродвигуни застосовуються?
|
||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 282; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.114.23 (0.01 с.) |



 повинен відповідати негативний приріст
повинен відповідати негативний приріст  та навпаки.
та навпаки. ,
, - критичне ковзання.
- критичне ковзання.



 .
. та зворотну
та зворотну  складові регулюючого обертаючого моменту:
складові регулюючого обертаючого моменту: .
.
 =0, але при
=0, але при  M рез ≠ 0(рис. 10.4) в досить широкому діапазоні ковзань. Тому, якщо роторові надати обертання, то такий двигун буде обертатись зі швидкістю n = const.
M рез ≠ 0(рис. 10.4) в досить широкому діапазоні ковзань. Тому, якщо роторові надати обертання, то такий двигун буде обертатись зі швидкістю n = const.
 . Така умова виконується при
. Така умова виконується при  Самохід повністю виключається при
Самохід повністю виключається при  (рис.10.5).
(рис.10.5).
 .
. майже на порядок більша від електромагнітної сталої часу
майже на порядок більша від електромагнітної сталої часу  Якщо статичний момент на валу
Якщо статичний момент на валу  , то з основного рівняння динаміки двигуна
, то з основного рівняння динаміки двигуна
 (10.1)
(10.1) , пускового
, пускового  або максимального
або максимального  . Тому поняття
. Тому поняття  є дуже громіздкими у зв'язку з нелінійністю механічних та регулювальних характеристик. Тому ці характеристики при практичних розрахунках лінеаризують.
є дуже громіздкими у зв'язку з нелінійністю механічних та регулювальних характеристик. Тому ці характеристики при практичних розрахунках лінеаризують.
 ідеалізованого двигуна (рис.10.6). Оскільки
ідеалізованого двигуна (рис.10.6). Оскільки ~
~  ,
, (10.2)
(10.2) , (10.3)
, (10.3) (10.4)
(10.4) (10.5)
(10.5)
 . Якщо
. Якщо  , то
, то
 та
та  . Для асинхронних виконавчих двигунів
. Для асинхронних виконавчих двигунів .
. і зменшується зі зростанням числа пар полюсів p та пускового моменту
і зменшується зі зростанням числа пар полюсів p та пускового моменту 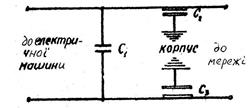
 застосовується для захисту від симетричних, а
застосовується для захисту від симетричних, а  ,
,  - від несиметричних завад.
- від несиметричних завад.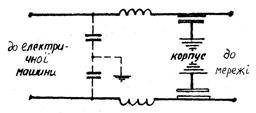

 Н/см² - те ж саме на порозі чутливості.
Н/см² - те ж саме на порозі чутливості. , відповідним вибором розрахункової полюсної дуги, створення ексцентричного зазору під полюсним наконечником, скосом пазів якоря або полюсного наконечника, застосуванням напівзакритих пазів якоря.
, відповідним вибором розрахункової полюсної дуги, створення ексцентричного зазору під полюсним наконечником, скосом пазів якоря або полюсного наконечника, застосуванням напівзакритих пазів якоря. , під якою розуміють мінімальну напругу керування, при якій двигун обертається з найменшою повзучою швидкістю. Цей сигнал тим більший, чим більший реактивний момент
, під якою розуміють мінімальну напругу керування, при якій двигун обертається з найменшою повзучою швидкістю. Цей сигнал тим більший, чим більший реактивний момент  , обумовлений електричною й магнітною асиметрією, та момент тертя в підшипниках
, обумовлений електричною й магнітною асиметрією, та момент тертя в підшипниках  .
.


