
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Загальна характеристика й класифікація синхронних мікродвигунівСодержание книги
Поиск на нашем сайте
Синхронні мікродвигуни різних типів з потужностями від часток до кількох сот ват використовуються в установках дротового та радіозв'язку, електричних годинниках, самописних приладах, звуковому кіно, системах синхронної передачі й програмного автоматичного керування, в пристроях спеціального призначення і т. і. Всі синхронні електродвигуни розділяють не реактивні, гістерезисні, крокові; з ротором, який котиться; тороїдні, редукторні. Реактивний та гістерезисний двигуни мають лише одну обмотку на статорі, прості за конструкцією, не мають ковзних контактів. Вони можуть бути застосовані в тих випадках, коли потрібна точна, постійна швидкість обертання при малому моменті. Мікродвигуни, які застосовуються у пристроях синхронного зв'язку, слугують для здійснення синфазного й синхронного поворотів або обертання кількох осей, які механічно не пов'язані між собою. Відтворення повороту може бути плавним або стрибкоподібним. За величиною створюваних потужності та обертового моменту пристрої синхронного зв'язку діляться на індикаторні й силові. У першому випадку створювана потужність необхідна лише для переміщення вказівної стрілки. У другому – долається значний момент опору навантаження. Основною вимогою до таких мікромашин є точність передачі кутових переміщень, яка визначається кутом непогодження θ після відпрацювання сигналу в стані спокою (статична похибка) або усталеної швидкості обертання (динамічна похибка). В системах зі стрибкоподібним поворотом точність характеризується кутом між двома суміжними стійкими положеннями ротора крокового двигуна. Такий двигун, який перетворює електричні сигнали на дискретні кутові або лінійні переміщення, не має зворотних зв'язків, оскільки число імпульсів та переміщення в ньому однозначно відповідні одне одному. Реактивний електродвигун – це синхронний двигун з явнополюсним ротором без обмотки збудження й постійних магнітів, магнітне поле якого створює МРС статора. Гістерезисним називають синхронний електродвигун з циліндричним або дисковим ротором без обмотки, обертаючий момент якого в асинхронному режимі створюється в основному за рахунок гістерезису матеріалу ротора, а при синхронному обертанні – зчепленням постійного поля намагніченості ротора з обертовим полем статора. Кроковим (імпульсним) електродвигуном називають синхронний двигун з явнополюсним реактивним або активним ротором, який перетворює електричні імпульси в дискретні кутові переміщення – «кроки». Двигуном з ротором, який котиться, називають синхронний двигун з реактивним або гістерезисним ротором, який котиться по розточці статора, призначений для одержання низьких швидкостей обертання без механічних редукторів. Для цієї ж мети застосовуються редукторні двигуни, якими є електродвигуни з явнополюсними або не явнополюсними зубчастим статором та реактивним явнополюсним або зубчастим ротором. Редукторні електродвигуни є різновидом крокових двигунів. Тороїдними називають реактивні або гістерезисні синхронні двигуни, які мають тороїдний статор з кільцевою обмоткою, що дозволяє при малих розмірах двигуна одержати багатополюсну машину й суттєво зменшити синхронну швидкість обертання без механічних редукторів. Тороїдні двигуни можуть мати також активний ротор з постійними магнітами. Синхронні мікроелектродвигуни можуть бути однофазними й трифазними. Конструктивно статори можуть виконуватись трьох основних типів: а) звичайний неявнополюсний статор з пазами й розподіленими в них обмотками; б) тороїдний статор з кільцевою розподіленою обмоткою; в) явнополюсний статор з однією або кількома обмотками збудження. Реактивні двигуни за конструкцією ротора поділяються на: а) явнополюсний ротор звичайної конструкції; б) секціонований явнополюсний ротор; в) явнополюсний з білячою кліткою; г) зубчастий. Для гістерезисних двигунів ротор виготовляють таких різновидів: а) у вигляді циліндра з магнітно-твердого матеріалу з великими гістерезисними втратами; б) у вигляді плоского диска із загартованої сталі. Конструктивно крокові двигуни можуть виконуватись одностаторними й тристаторними, із зосередженими обмотками керування й активним ротором і т. д. Основними показниками, які характеризують роботу синхронних двигунів, є такі: а) статичний синхронізуючий момент Для пристроїв синхронного зв'язку основне значення має крутість зростання
Рис. 12.1. Кутові характеристики синхронних двигунів з більшою 1 та меншою 2 крутістю
б) Крутість характеристики Крутість початкової частини статичної характеристики можливо оцінювати синхронізуючим моментом
в) Для крокових двигунів важливою характеристикою є момент стійкості, тобто величина г) Якщо електродвигун працює в індикаторному режимі, то вводиться поняття статичного коефіцієнта добротності:
де д) Для оцінки динамічних властивостей синхронних виконавчих двигунів використовується поняття динамічного синхронізуючого моменту Залежність
Рис. 12.2. Динамічна характеристика синхронного двигуна
В крокових двигунах замість n слід враховувати f, тобто число імпульсів за одиницю часу (частоту). Крім того, для цих двигунів слід враховувати такі показники: а) крок у градусах (число кроків за оберт валу); б) приємистість (найбільша частота в) найбільша частота г) електромагнітна стала часу д) динамічна добротність
|
||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 358; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.12.100 (0.006 с.) |

 , тобто момент на валу приймача, виникаючий у стані спокою з появою кута непогодженості θ. Залежність
, тобто момент на валу приймача, виникаючий у стані спокою з появою кута непогодженості θ. Залежність  називається статичною характеристикою.
називається статичною характеристикою.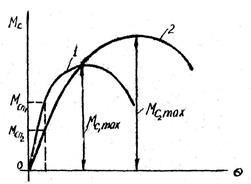 .
. , тобто моментом створюваним на валу двигуна при θ=1º, чим більший
, тобто моментом створюваним на валу двигуна при θ=1º, чим більший  :
: . (12.1)
. (12.1) , (12.2)
, (12.2) - момент тертя на валу.
- момент тертя на валу. , який є максимальним моментом
, який є максимальним моментом  , який може створювати двигун при даних швидкості і куті θ, не випадаючи з синхронізму.
, який може створювати двигун при даних швидкості і куті θ, не випадаючи з синхронізму. (рис. 12.2) називається динамічною характеристикою.
(рис. 12.2) називається динамічною характеристикою.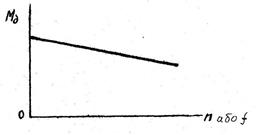
 , за якої можливий раптовий пуск та зупинка двигуна без втрати кроку);
, за якої можливий раптовий пуск та зупинка двигуна без втрати кроку); , за якої середній момент
, за якої середній момент  зменшується до нуля;
зменшується до нуля; ;
; (12.3)
(12.3)


