
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Однофазний синхронний гістерезисний двигун з екранованими полюсамиСодержание книги
Поиск на нашем сайте При потужностях від часток до кількох ват інколи застосовується однофазний синхронний двигун з екранованими явно вираженими полюсами статора (рис. 12.19).
а) б) Рис. 12.19. Конструктивна схема (а) та векторна діаграма (б) двигуна
Оскільки кути γ й β не дорівнюють 90º, а амплітуди МРС екранованої Якщо на полюсах розташовано по одній екрануючій котушці, то двигун не реверсивний. Якщо – по дві (по одній на кожній з розщеплених частин явно виражених полюсів), то, короткозамикаючи ту чи іншу пару котушок, створюється необхідний напрям обертання. Іноді для покращення кривої розподілу поля по розточці ротора установлюють магнітні шунти 1 (рис.12.19) у вигляді кількох тонких смужок сталі. В цьому випадку зростають потоки розсіювання. Двигуни часто виконуються з убудованими знижуючими редукторами й застосовуються для привода електричних годинників, реле часу, різних програмних механізмів. Крім простоти конструкції й дешевизни перевагою цих двигунів є те, що вони надійно працюють в повторно-короткочасних режимах, оскільки основними постійними втратами потужності в двигуні є втрати в короткозамкнених витках. Недоліки цих двигунів – мала корисна потужність та малі пускові моменти (не більше 0.2-0.4 від номінального моменту) й ККД
Крокові двигуни
Синхронні мікродвигуни, обмотки статора яких живляться імпульсною напругою від спеціальних пристроїв – комутаторів, мають дискретне обертання валу. Вал при подачі імпульсу на статорну обмотку переміщується на дискретний кут – крок. Тому такі двигуни називають «кроковими». У зв'язку із застосуванням їх в імпульсних системах синхронної передачі зустрічається назва «імпульсний двигун». У практиці застосовуються різні конструктивні типи крокових двигунів: із зосередженими (явно виражені полюси статора) або розподіленими обмотками керування; одно-, дво- та тристаторні; з явнополюсним ротором з обмоткою збудження (активний ротор) та без неї. В останньому випадку ротор виконується за конструкціями роторів реактивних двигунів. Активний ротор може виконуватись з постійними магнітами. Крім того, застосовуються конструкції з дисковим ротором та печатною обмоткою, лінійні, які перетворюють сигнал на лінійне переміщення. Крокові двигуни застосовуються для привода механізмів, які мають старт-стопний або безперервний рух. В остатньому випадку сигнал задається у вигляді послідовності імпульсів. Тому такі двигуни використовують у стрічкопротяжних пристроях для уведення й виведення інформації, лічильниках, приводах верстатів з програмним керуванням, ракетній техніці, самозаписуючих механізмах і т. д. На статорі крокового двигуна розташовуються дві (іноді – три, чотири) зсунуті у просторі зосереджені або розподілені обмотки. Якщо обмотка розподілена, то вона конструктивно не відрізняється від звичайних обмоток синхронних машин. Ротор двигунів завжди має явнополюсне виконання. Крокові двигуни можуть мати активний ротор (з обмоткою збудження або постійними магнітами) або реактивний. В останньому випадку двигуни називають іноді параметричними, оскільки магнітні провідності Якщо ротор виконано з постійними магнітами, то такий кроковий двигун називають магнітоелектричним. Число полюсів ротора менше від числа полюсів статора. При активному роторі виконують число полюсів статора у два рази більшими від числа полюсів ротора. Принцип роботи імпульсного двигуна полягає в такому. В обмотку статора подається постійний струм (рис.12.20). Якщо збуджена обмотка 1-1´ (рис.12.20, а), то відповідно ротор розташовується проти збуджених полюсів. Якщо збуджена обмотка 2-2´, а 1-1´ - вимикається, то ротор повертається на один крок і розташовується проти збуджених полюсів статора (рис.12.20, б). При кожному перемиканні ротор повертається на один крок. Якщо збуджувати обмотки попарно, наприклад, 1-1´ та 2-2´, то ротор буде повертатись за один крок на кут у два рази менший (рис.12.20, в). Щоб двигун змінив напрям обертання, необхідно змінити послідовність вмикання обмоток статора. Таким чином, кожному положенню ротора відповідна певна комбінація вмикання обмоток статора. а) б) в) Рис. 12.20. Принцип дії імпульсного двигуна
Якщо вмикати обмотки тільки окремо, то в нашому прикладі це буде відповідати трьом комбінаціям. Якщо чергувати вмикання кожної обмотки окремо з попарним вмиканням обмоток сусідніх полюсів, то додасться ще три комбінації при вмиканні обмоток. Кожну комбінацію при вмиканні обмоток звичайно називають тактом. Таким чином, при трьох обмотках статора можливе тритактне й шеститактне вмикання. В залежності від того, чи змінюється полярність напруги, яка передається на обмотки при перемиканнях, розрізняють однополярне й різнополярне вмикання. У розглянутому прикладі з тритактною комутацією крок дорівнює 60º, тобто
де К – число тактів, тобто К=3. При шеститактній комутації К=6, і за формулою (12.46) Число тактів
де m – число обмоток статора; γ – найбільше число обмоток в одній комбінації вмикання. В нашому випадку при тритактному вмиканні γ=1, а при шеститактному – γ=2. Якщо в наведеному прикладі збільшити число пар полюсів ротора р, то крок зменшиться. При хрестоподібному роторі й шеститактному вмиканні поворот здійснюється на кут у два рази менший, ніж при р=1 (рис.14.21), тобто на 15º.
Рис. 12.21. Принцип дії імпульсного двигуна з хрестоподібним ротором
Тому
Хрестоподібний ротор повертається в протилежному напрямі відносно повороту магнітного поля. За одну секунду ротор повернеться на кут
Таким чином, зменшення
Рис. 12.22. Імпульсний двигун із зубчастими поверхнями ротора й статора
Таким чином, зубці ротора виконують роль полюсів, тобто
або
Тоді з урахуванням формул (12.48), (12.50):
Рис. 12.23. Джерело керуючих імпульсів на діодах
У зв'язку з наявністю зубцевих виступів на явновиражених полюсах статора ці двигуни іноді називають реактивними редукторними кроковими двигунами з гребінчастими виступами на статорі. Зубцеві поділки можуть мати розмір до 2мм. При цьому виходить крок у кілько градусів або часток градуса. Як джерела керуючих імпульсів застосовуються контактні або напівпровідникові комутатори. Зокрема, якщо на статорі розташовані дві обмотки керування, то в якості комутатора може застосовуватись схема на діодних обмежувачах (рис.12.23). Значного зменшення кроку одержано в двигуні Томаса, який у дійсності складається з трьох окремих двигунів, які мають спільний вал. Статори й ротори мають однакове число пазів та зубців. Обмотка статора виконана таким чином, що кожен зубець є полюсом,, причому суміжні зубці різнополярні. Ротори без обмоток насаджені на вал зі зсувом по колу на 1/3 зубцевої поділки. Осі пазів статора співпадають. При подачі імпульсів напруги почергово на кожен статор вал двигуна повертається кожного разу на кут, відповідний 1/3 зубцевої поділки. Тому число кроків за один оберт дорівнює 3Z, де Z – число пазів статора. При реверсі змінюється порядок подачі імпульсів на статор. Аналогічно побудовані двигуни МЭИ – ЦНИИТМАШ та АНУРСР. Швидкість обертання ротора крокового двигуна регулюється в широкому діапазоні зміною частоти подачі імпульсів. Частотою визначається також фіксована зупинка, пуск в хід та реверс. В залежності від величини частоти При статичному режимі струмами в обмотках статора створюється нерухоме поле. Тому ротор двигуна якийсь час знаходиться в режимі фіксованої стоянки. Квазістатичний режим виникає при відпрацюванні одиничних кроків (приводи старт-стопних, стрічкопротяжних та інших механізмів). Він характеризується тим, що перед відпрацюванням наступного кроку ротор приходить до нерухомого стану, тобто механічні коливання його біля положення рівноваги повністю згасають. Гранична частота квазістатичного режиму визначається часом затухання коливань ротора. Для зменшення коливань та збільшення граничної частоти застосовують різні демпфуючі пристрої, а також збільшують число тактів К. В останньому випадку кут переміщення й кінетична енергія ротора зменшуються, зменшуючи схильність ротора до коливань. Усталений режим відповідний постійній частоті керуючих імпульсів Перехідний режим є основним в експлуатації крокових двигунів і складається з пуску, гальмування, реверсу, зміни швидкості обертання. При цьому максимальна частота Крім розглянутих, важливими характеристиками крокового двигуна є пусковий момент на валу двигуна, номінальний динамічний або навантажувальний момент і т. д. Статичний синхронізуючий момент в реактивних крокових двигунах за своєю природою реактивний. Кількісно його можливо виразити через електромагнітну енергію в повітряному зазорі А й кут θ:
Оскільки електричні градуси пов'язані з геометричними співвідношеннями
то
Величина електромагнітної енергії в повітряному зазорі
Тоді
Магнітну провідність повітряного зазору λ визначимо таким чином.
Рис. 12.24. Зміна магнітної провідності повітряного зазору
Нехтуючи вищими гармоніками в кривій поля повітряного зазору, графік зміни λ можливо подати рис.12.24 Тоді
Величина
Максимальний момент Для двигуна з активним ротором, як і для звичайного синхронного двигуна з електромагнітним збудженням:
Синхронізуючий момент дорівнює:
В статичному, квазістатичному й перехідному режимах струм в обмотці керування досягає усталеного значення. Але в усталеному режимі безперервного обертання синхронізуючий момент на валу двигуна зменшується.
Рис. 12.25. Зміна струму в обмотці крокового двигуна
Це пояснюється тим, що за проміжок часу увімкненого стану обмотки
Тобто
В двигунах з активним ротором
Рис. 12.26. Зміна відносного динамічного моменту крокового двигуна в залежності від швидкості обертання
Зменшення Рис. 12.27. Залежності
Як уже говорилось, важливою характеристикою крокового двигуна є пусковий момент При перемиканні сигналу з обмотки 1 на обмотку 2 момент
Рис. 12.28. Залежності
При m=2 та
Рис. 12.29. Несиметричні зубці статора й ротора
В цьому випадку кутова характеристика
Рис. 12.30. Кутові характеристики двигуна з несиметричними зубцями
Якщо реактивний кроковий двигун має розподілену обмотку, то при плавній зміні частоти Після запуску двигун працює стійко, тобто без втрат кроків, тільки при певних умовах. Для цього необхідно, щоб синхронізуючий момент
А це можливо лише поблизу точки О (рис.12.30). При До крокових двигунів, які працюють в автоматичних системах, ставляться такі вимоги: надійність в роботі, швидкодія, малий крок, неприпустимість накопичення помилки зі збільшенням числа кроків, відсутність вільних коливань ротора при відпрацюванні кроку, мінімальне число обмоток керування. Ці вимоги значною мірою задовольняються завдяки перевагам крокових двигунів. Розглянемо переваги й недоліки крокових двигунів. Великою перевагою тристаторних крокових двигунів є можливість одержання малого кроку при великому питомому синхронізуючому моменті Крокові двигуни з розподіленою обмоткою майже не мають наведених недоліків, але вони не дозволяють одержати малий крок, мають менший Застосовуючи для крокових двигунів активні ротори (частіше – з постійними магнітами), можливо одержати значно більші Але двигун з активним ротором потребує складнішої системи керування, має більші втрати потужності, дозволяє меншу частоту На останок зазначимо, що при
Контрольні запитання
|
||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 598; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.147 (0.014 с.) |

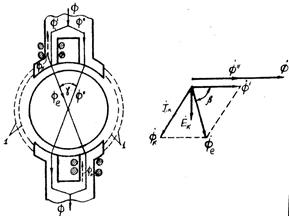
 та не екранованої
та не екранованої  частин полюса
частин полюса  , створюється еліптичне поле. Ротор може виконуватись з білячою кліткою (асинхронний варіант), з магніто-твердого матеріалу з магнітними провідностями
, створюється еліптичне поле. Ротор може виконуватись з білячою кліткою (асинхронний варіант), з магніто-твердого матеріалу з магнітними провідностями  (гістерезисний варіант), та з таким же ротором, але при
(гістерезисний варіант), та з таким же ротором, але при  (гістерезисно-реактивний варіант).
(гістерезисно-реактивний варіант). %.
%.
 (12.46)
(12.46) .
. (12.47)
(12.47)
 (12.48)
(12.48) , де f – частота подачі імпульсів. Це відповідне
, де f – частота подачі імпульсів. Це відповідне  обертанням за секунду. А за хвилину з урахуванням (12.48):
обертанням за секунду. А за хвилину з урахуванням (12.48): (12.49)
(12.49) та
та  можливо досягти, збільшуючи р. Для цього виконують поверхню ротора зубчастою. Зубці виконують і на явно виражених полюсах статора (рис.12.22). Зубцеві поділки ротора й статора однакові. При цьому зубці ротора співвісні з зубцями однієї діаметрально розташованої пари полюсних виступів статора й зсунуті на 1/3 зубцевої поділки відповідно по та проти годинникової стрілки відносно зубців двох інших пар полюсних виступів. При шеститактному перемиканні статорних обмоток керування відбувається поворот МРС статора на 30º, а реактивний момент повертає ротор на 1/6 зубцевої поділки в положення найбільшої магнітної провідності.
можливо досягти, збільшуючи р. Для цього виконують поверхню ротора зубчастою. Зубці виконують і на явно виражених полюсах статора (рис.12.22). Зубцеві поділки ротора й статора однакові. При цьому зубці ротора співвісні з зубцями однієї діаметрально розташованої пари полюсних виступів статора й зсунуті на 1/3 зубцевої поділки відповідно по та проти годинникової стрілки відносно зубців двох інших пар полюсних виступів. При шеститактному перемиканні статорних обмоток керування відбувається поворот МРС статора на 30º, а реактивний момент повертає ротор на 1/6 зубцевої поділки в положення найбільшої магнітної провідності.

 (12.50)
(12.50) (12.51)
(12.51) (12.52)
(12.52)
 розрізняють такі режими роботи крокових двигунів: статичний, квазістатичний, усталений та перехідний. Розглянемо більш докладно кожен з цих режимів.
розрізняють такі режими роботи крокових двигунів: статичний, квазістатичний, усталений та перехідний. Розглянемо більш докладно кожен з цих режимів. , то кроки ротора супроводжуються вільними коливаннями, які сильно збільшують динамічну похибку. Якщо
, то кроки ротора супроводжуються вільними коливаннями, які сильно збільшують динамічну похибку. Якщо  , то амплітуда коливань ротора різко зростає, настає механічний резонанс, який може призвести до випадання з синхронізму при слабкому демпфуванні. Резонанс виникає й при
, то амплітуда коливань ротора різко зростає, настає механічний резонанс, який може призвести до випадання з синхронізму при слабкому демпфуванні. Резонанс виникає й при  виникають вимушені коливання ротора з частотою
виникають вимушені коливання ротора з частотою  , за якої можливий пуск без випадання з синхронізму (без втрати кроку), називається частотою приємистості
, за якої можливий пуск без випадання з синхронізму (без втрати кроку), називається частотою приємистості  . Ця частота зростає зі збільшенням статичного синхронізуючого моменту
. Ця частота зростає зі збільшенням статичного синхронізуючого моменту  , зменшенням крокового кута
, зменшенням крокового кута  та моменту інерції обертових частин J. При номінальному навантаженні
та моменту інерції обертових частин J. При номінальному навантаженні  =100-1000 Гц. Гранична частота
=100-1000 Гц. Гранична частота  , при якій можливе гальмування крокового двигуна без випадання з синхронізму, більша, ніж
, при якій можливе гальмування крокового двигуна без випадання з синхронізму, більша, ніж  . У двигунах з великим демпфуванням та великими електромагнітними сталими часу
. У двигунах з великим демпфуванням та великими електромагнітними сталими часу  наближається до
наближається до  (12.53)
(12.53)
 (12.54)
(12.54) (12.55)
(12.55) (12.56)
(12.56)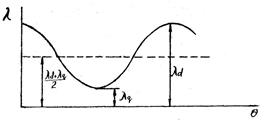
 (12.57)
(12.57) (12.58)
(12.58) виникає при
виникає при  .
. (12.59)
(12.59) (12.60)
(12.60)
 (рис.12.25) усталене значення струму керування
(рис.12.25) усталене значення струму керування  суттєво відрізняється від середнього струму
суттєво відрізняється від середнього струму  внаслідок великої сталої часу
внаслідок великої сталої часу  (сталою часу
(сталою часу  можливо знехтувати). Тому в формулі (12.58) необхідно врахувати не
можливо знехтувати). Тому в формулі (12.58) необхідно врахувати не  , а
, а  , тобто динамічний момент
, тобто динамічний момент  :
: (12.61)
(12.61) (12.62)
(12.62) може доходити до 10-20% від
може доходити до 10-20% від  у статичному режимі. Зменшення
у статичному режимі. Зменшення  можливо подати у вигляді графіків рис.12.26.
можливо подати у вигляді графіків рис.12.26.

 для трьох обмоток керування
для трьох обмоток керування . Для визначення пускових властивостей крокового двигуна розглянемо сумісні графіки залежностей
. Для визначення пускових властивостей крокового двигуна розглянемо сумісні графіки залежностей 
 (рис.12.28) завжди
(рис.12.28) завжди  (чотиритактна комутація) або, при зубчастих поверхнях, зубці статора й ротора виконують несиметричними (рис.12.29).
(чотиритактна комутація) або, при зубчастих поверхнях, зубці статора й ротора виконують несиметричними (рис.12.29).

 він синхронно змінить свою швидкість обертання. Якщо ж такий кроковий двигун призначений для роботи при
він синхронно змінить свою швидкість обертання. Якщо ж такий кроковий двигун призначений для роботи при  , то для пуску на полюсах ротора розміщують пускову білячу клітку. При розгоні під дією асинхронного моменту досягається підсинхронна швидкість, а потім під дією реактивного моменту ротор втягується в синхронізм.
, то для пуску на полюсах ротора розміщують пускову білячу клітку. При розгоні під дією асинхронного моменту досягається підсинхронна швидкість, а потім під дією реактивного моменту ротор втягується в синхронізм.
 . Поряд з цим вони мають низьку швидкодію й погане (на 1/3) використання активних матеріалів. При роботі виникають пульсації моменту.
. Поряд з цим вони мають низьку швидкодію й погане (на 1/3) використання активних матеріалів. При роботі виникають пульсації моменту. , максимальний момент
, максимальний момент  виникає при
виникає при  . Це дозволяє удвічі збільшити зону стійкої роботи двигуна.
. Це дозволяє удвічі збільшити зону стійкої роботи двигуна. об/хв й малому кроці застосовують двигуни з гребінчастими виступами на полюсах статора.
об/хв й малому кроці застосовують двигуни з гребінчастими виступами на полюсах статора.


