
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Різні виконання й класифікація електричних машин з ротором, який котиться (ЕМКР)Содержание книги
Поиск на нашем сайте
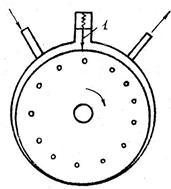
Асинхронні ДКР. В одній з конструкцій (асинхронний двигун С.П. Розанова) масивне феромагнітне тіло (ролики) обкочує поверхню розточки статора назустріч полю (рис. 14.4).
Рис. 14.4. Асинхронний ДКР Ролик обертається навколо своєї осі зі швидкістю:
де s – ковзання. Ролики можуть бути шихтованими з короткозамкненою кліткою, а поверхні обкочування – зубчастими. Швидкість обертання валу двигуна: де dp – діаметр ролика; Dн – діаметр спрямівника. Двигун конструктивно складний і має низькі енергетичні показники. Існують і інші конструкції асинхронних двигунів з ротором, який котиться. ДКР з дисковим ротором. У 1958 р. австрійський інженер R. Schön запропонував синхронну машину з дисковим ротором, який котиться (рис. 14.5.).
Рис. 14.5. Синхронна машина з ротором, який котиться
Ротор – диск 2 обертається на валу 6. Обертовий магнітний потік створюється трифазною обмоткою 1, розташованою на осерді 5. Уніполярний потік створюється котушкою 4. Швидкість обертання валу може регулюватись гвинтом 7. Вся конструкція розташована в корпусі 3. В цій конструкції відсутні вібрації. Машина може використовуватись як тихохідний генератор для гідростанцій з малим напором (припливні). ЕМКР інших конструкцій. Машини з циліндричним ротором можуть використовуватись як високочастотні генератори (50÷70 кГц) при синусоїдній формі напруги. Постійний магнітний потік може створюватись постійними магнітами, або без спеціальної обмотки постійного струму з використанням трифазних нульових схем випрямляння. На статорі іноді можуть розташовуватись дві обмотки змінного струму з різним числом пар полюсів, які живляться напругами різної величини й частоти. Такий двигун може використовуватись як сельсин – приймач в системі синхронного валу з електричною редукцією. Можливе виконання ДКР комбінованого типу (синхронно-асинхронних, коли синхронний та асинхронний моменти діють узгоджено; синхронно-гістерезисних і т. д.). ДКР постійного струму. ДКР можуть працювати від мережі постійного струму. Одна з конструкцій з якорем – диском без обмотки складається з трьох електромагнітів, які по черзі вмикаються спеціальним комутатором. Регулювання швидкості здійснюється регулювальним гвинтом, як у двигуна R. Schön. В двигуні відсутні вібрації. Він простий за конструкцією. Існують конструкції ДКР постійного струму з циліндричними роторами. Кроковий ДКР. Т.І. Зєвін запропонував конструкцію крокового двигуна з ексцентричним ротором (рис. 14.6.).
Рис. 14.6. Кроковий ДКР
Обмотки керування розташовуються на трьох осердях статора і вмикаються попарно. Ротор виконаний у вигляді феромагнітного порожнистого стакана, розташованого на колінчастому валу. Між статором і ротором зубчасте зачеплення. Такий кроковий двигун забезпечує фіксоване положення валу в безструмовому стані та має покращені динамічні властивості. Двигуни – насоси. Принцип дії ДКР використовується в низці виконавчих механізмів. Так у 1954 р. в США був запропонований комбінований двигун-помпа, який працює як ДКР з більчиною кліткою на роторі. Ротор двигуна є одночасно й ротором помпи (рис. 14.7.)
Рис. 14.7. ДКР-помпа
До поверхні ротора за допомогою пружини притискається плунжер-перегородка 1, яка поділяє порожнину помпи на всмоктуючу та випускну. Суміщення приводного двигуна й помпи в одному механізмі дозволяє зменшити габарити й усунути проміжні ланки кінематичної передачі. Двигуни-вібратори. ДКР можуть застосуватись як вібратори. Набір роторів з різними діаметрами дозволяє змінювати робочі параметри вібратора в широких межах. Електричні вібратори з ДКР забезпечують високочастотні коливання з порівняно малими витратами енергії. ЕМКР можливо класифікувати по-різному. За призначенням: двигуни, генератори, спеціальні машини (синхронного зв’язку, муфти, помпи, вібратори, імпульсно-фрикційні двигуни). За родом струму: постійного (контактні, безконтактні), змінного (однофазні, багатофазні). За принципом дії: а) кондукційні (з вентильним підмагнічуванням), реактивні, магнітоелектричні, електромагнітні, з уніполярним підмагнічуванням, з двома обмотками на статорі; б) індукційні (короткозамкнений ротор, масивний феромагнітний ротор, порожнистий феромагнітний або парамагнітний ротор); в) комбіновані (синхронно-асинхронний, синхронно-гістерезисний). За конструктивним виконанням (циліндричні, дискові, одностаторні, двостаторні, внутрішній або зовнішній ротор). За виконанням поверхні котіння (гладкі, зубчасті, циліндричні, конічні). За механічними характеристиками (синхронна – жорстка, асинхронна – м'яка). За швидкісними характеристиками: а) нерегульовані; б) регульовані (передаточним відношенням, ковзанням, зміною струму якоря, зміною струму збудження, механічним гальмом). За напрямом обертання (нереверсивні, реверсивні). За характером руху ротора (безперервне, переривчасте – крокове). За виконанням кінематичної передачі на вал (механічні муфти й передачі, електромагнітні й магнітні муфти).
Хвильові електродвигуни В приводах виконавчих механізмів різних типів застосовуються редуктори з хвильовими передачами. Вони забезпечують велике передаточне відношення (до 100 на один ступінь) при відносно малій масі й габаритах, підвищену кінематичну точність, високий ККД, довговічність та надійність механізму. За допомогою таких редукторів можлива передача механічного обертання в герметичну порожнину через перегородку. Внаслідок цих переваг хвильові передачі застосовуються в приводах як загальнопромислового, так і спеціального призначення. Різні хвильові передачі відрізняються одна від одної видом зачеплення, числом хвиль деформації гнучкого елемента, конструктивним виконанням та типом генератора механічних хвиль. Перспективне використання хвильових передач з електромагнітним генератором хвиль. В такій передачі відсутні конструктивні елементи, які швидко обертаються й високошвидкісні підшипники, що дозволяє покращити динамічні характеристики привода та розширити області застосування хвильових передач. Швидкодія виконавчого механізму з хвильовою передачею сумірна з швидкодією гідродвигуна. Хвильова передача з електромагнітним генератором механічних хвиль (рис. 14.8, а)складається зі статора з розподіленою двополюсною m-фазною обмоткою, в розточці якого розташований тонкостінний феромагнітний стакан-ротор.
а) б) Рис. 14.8. Хвильовий електродвигун
Під дією сил магнітного поля ротор деформується (рис. 14.8, б) й набуває у перерізі еліпсоїдної форми, велика вісь якої переміщується синхронно з полем. Крім того, ротор обертається навколо своєї осі з редукованою швидкістю. Величина редукції визначається різницею довжин кола розточки статора й периметра ротора. Повільне обертання ротора навколо своєї осі за допомогою кінематичної ланки передається на вихідний вал. Уперше така конструкція електромеханічного пристрою була запропонована А.І. Москвітіним. За принципом дії така передача є синхронним (або хвильовим) електродвигуном (ХД). Хвильовий електродвигун характеризується таким. 1. Великий обертовий момент при відносно малій масі. 2. Великий момент самогальмування й практична відсутність вибігу й самоходу. 3. Здатність до частих пусків та реверсів. 4. Можливість використання у кроковому режимі. 5. В машині відсутні вібрації. Недоліком є необхідність забезпечення еластичності ротора у поєднанні з потрібною товщиною магнітопровода, що створює значні конструктивні й технологічні труднощі. Число хвиль деформації ротора: u=2р, де р – число пар полюсів обмотки якоря. У зв’язку із зубчастим зачепленням ротора зі статором синхронно з полем обертається не ротор, а хвиля деформації гнучкого ротора. Відбувається зміна провідності робочого зазору. Тому виникає синхронний реактивний момент, який намагається утримати ротор в такому положенні, щоб магнітна провідність зазору була максимальною. При цьому швидкість обертання ротора
де Z1, Z2 – відповідно числа зубців зачеплення статора й ротора. Якщо Z1>Z2, то вихідний вал обертається в бік, протилежний до напряму обертання поля. Якщо гнучкий елемент пов’язаний зі статором зубчастим зачепленням, а ротор нерухомий, але піддається хвильовій деформації, то
В оберненій конструкції ХД ротор обертається узгоджено з полем. В цьому випадку магнітопровід може виконуватись не шихтованим, оскільки асинхронний момент діє узгоджено з синхронним. Підвищення енергетичних показників можливо досягти, якщо використати уніполярне підмагнічування. В даному випадку число хвиль u=2р. Звичайно u=2.
|
||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 209; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.205.149 (0.007 с.) |


 , (14.10)
, (14.10) , (14.11)
, (14.11)


 , (14.12)
, (14.12) . (14.13)
. (14.13)


