
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гіроскопічні, моментні й тороїдні асинхронні двигуниСодержание книги
Поиск на нашем сайте
Деякі виконавчі асинхронні двигуни використовуються для спеціального призначення. У зв'язку з цим вони мають конструктивні особливості. Такими машинами є гіроскопічні й моментні двигуни. Крім того, розповсюджується ще один конструктивний тип виконавчих двигунів – тороїдні.
Гіроскопічні асинхронні двигуни
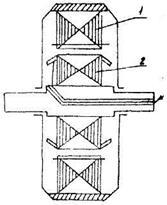
Гіроскопічні трифазні асинхронні двигуни (рис. 11.5), які застосовуються в гіроскопічних системах літальних апаратів, виконуються із зовнішнім ротором 1 та внутрішнім нерухомим статором 2. При заданих габаритах гіроскопічного пристрою таке виконання двигуна дозволяє збільшити діаметр ротора й одержати великий момент інерції його.
Рис. 11.5. Конструктивна схема гіроскопічного асинхронного двигуна
Точність роботи гіроскопічного пристрою визначається величиною й постійністю кінетичного моменту Jω/g. Збільшення кінетичного моменту досягається збільшенням моменту інерції ротора J та швидкості його обертання ω. Напруга живлення цих двигунів становить звичайно 36-40 В при частоті 400, 500, 1000 і більше Гц. Швидкості обертання досягають 10000-60000 об/хв. Номінальні потужності на валу цих двигунів знаходяться в межах від часток Вт до кількох десятків Вт. Гіроскопічні двигуни звичайно працюють без механічного навантаження на валу, а потужність витрачається тільки на втрати на тертя в підшипниках та ротора об повітря. Практично корисна потужність на валу цього двигуна У зв'язку з підвищеним моментом інерції ротора у цих двигунів відносно велика електромеханічна стала часу. Час розгону двигуна може досягати кількох хвилин. Зменшення цього часу може бути досягнуто збільшенням пускового моменту. Одним із способів збільшення пускового моменту є збільшення напруги на двигуні під час пуску. У виготовлених гіроскопічних трифазних асинхронних двигунах коефіцієнт перевантажувальної здатності становить
Моментні асинхронні двигуни
В деяких системах автоматичного регулювання (САР) та керування (САК) в якості вимірювальних або керуючих елементів застосовують одно - та трифазні асинхронні двигуни з білячою кліткою, які працюють в режимі загальмованого ротора. Такі двигуни називають моментними. Їх застосовують, наприклад, в гіроскопічних пристроях у якості коригуючих двигунів (гіровертикаль).
Рис. 11.6. Схема вмикання моментного двигуна
Вони створюють коригуючий момент для збереження постійності положення осі гіроскопа у просторі. Ця непостійність положення осі гіроскопа є наслідком впливу невеликого моменту тертя й виявляється у повільному відході осі. Якщо моменти тертя в системі значні, то застосовуються трифазні асинхронні двигуни. За конструкцією моментний асинхронний двигун подібний до гіроскопічних. Двигун багатополюсний реверсивний. Має малу осьову довжину й відносно великий діаметр. Внутрішній статор двигуна з обмотками закріплюється на рамці, а зовнішній ротор – на кришці гіроскопа. Обмотка керування (рис. 11.6) складається з двох частин, укладених у ті ж самі пази біфілярно. Якщо на обмотку Потужність моментного двигуна практично дорівнює втратам в обмотках статора і ротора і визначає тепловий режим двигуна у загальмованому стані.
11. 3. 3. Тороїдні двигуни [39]
Тороїдні електродвигуни – спільна назва електродвигунів різних типів: асинхронних з масивним феромагнітним ротором, гістерезисних та двигунів з постійними магнітами, об'єднаних наявністю в конструкції тороїда, який має намотану у загальному випадку багатофазну обмотку спірального типу (кільцеву або граммівську). Використання тороїда дозволяє створити плоскі електродвигуни, прості за конструкцією й технологією виготовлення, а спіральна тороїдна обмотка – виконати багатополюсну систему для мініатюрних електродвигунів малої потужності на тороїдах малого розміру, у яких неможливо або важко виконати велику кількість полюсів іншими способами. Таким чином, за допомогою тороїдних двигунів можливо одержати достатньо низькі швидкості обертання ротора без застосування редукторів. Статорна обмотка тороїдного двигуна може намотуватись як вручну, так і на верстатах для намотування тороїдів (СНТ-5, СНТ-8, СНТ-12). Ці верстати дозволяють намотувати дротом 0,05-0,4мм тори з найменшим внутрішнім діаметром 5-20мм. При виконанні такої обмотки на торі з внутрішнім діаметром 12мм можливо виготовити звичайним способом не більше 8 полюсів, а за допомогою спіральної обмотки – кілька десятків. На рис. 11.7 наведені обмотка й принцип створення полюсів та векторна діаграма МРС (рис. 11.7., б).
а) б) в) Рис. 11.7. Обмотка (а) векторна діаграма МРС (б) та принцип створення полюсів (в) тороїдного двигуна
Виконання обмотки на гладкому тороїді – статорі сприяє усуненню втрат від зубцевих гармонічних.
а) б) Рис. 11.8. Конструктивні схеми тороїдних двигунів з двобічним торцевим (а) та порожнистим (б) ротором
У зв'язку з особливістю розташування обмотки з торців обох боків тороїда частіше виконується конструкція з двобічним торцевим розташуванням ротора (рис.11.8, а). В деяких випадках доцільна звичайна конструкція (рис.11.8, б). На валу з обох боків тороїда розташовуються феромагнітні диски з магнітом'якого матеріалу. При виконанні гістерезисного синхронного двигуна ротор виготовляється з магнітотвердого матеріалу. Тороїди та тори виготовляються або навиванням зі стрічкової сталі 3412, 3421, холоднокатаної сталі, або з магнітом'якого фериту. Іноді на кінцях тора виконують пази для виготовлення двошарової обмотки. Обмотка може виконуватись одношаровою або двошаровою. Двошарова має переваги, оскільки може виконуватись зі скороченим кроком для зменшення просторових гармонічних в кривій поля.
11. 4. Методи керування асинхронними виконавчими двигунами
Виконавчі асинхронні двигуни, як це видно з розгляданих конструкцій, на статорі мають дві окремі обмотки, зсунуті у просторі. Обмотка збудження постійно з'єднана з напругою мережі. На обмотку керування подається сигнал керування. Для змінення швидкості обертання асинхронного виконавчого двигуна змінюють ступінь еліптичності магнітного поля від колового до пульсуючого. При максимальному сигналі керування поле колове. Зі зменшенням сигналу воно стає еліптичним, а при відсутності сигналу керування – пульсуючим. Способи керування швидкістю обертання ротора виконавчого асинхронного двигуна (способи керування) витікають з теорії про форму обертового магнітного поля. Керування здійснюється зміною напруги на обмотці керування
Амплітудне керування
При цьому способі керування величина
а) б) Рис. 11.9. Схема вмикання (а) та векторна діаграма напруг (б) при амплітудному керуванні асинхронним виконавчим двигуном
Напруга За формулами (11.1) – (11.4):
При амплітудному керуванні:
тому
де ефективний коефіцієнт сигналу:
Тоді:
Струм прямої та зворотної послідовностей для обмотки збудження:
де
а) б) Рис. 11.10. Схеми заміщення виконавчого двигуна для прямої (а) та зворотної (б) послідовностей
Для обмотки керування:
Тому
Схеми заміщення складаються окремо для прямої та зворотної послідовностей, оскільки вони різняться величиною активного опору ротора. Цей опір залежить від ковзання ротора відносно прямої та зворотної послідовностей:
де
а) б) Рис. 11.11. Спрощені схеми заміщення двигуна Оскільки ротор виконавчого двигуна має підвищений активний опір, знехтуємо всіма іншими опорами, тобто «ідеалізуємо» двигун. Тоді схема заміщення й аналіз суттєво спростяться (рис.11.11). В цьому разі
Для струму керування:
З одержаних виразів визначимо механічні й регулювальні характеристики виконавчого двигуна при амплітудному керуванні. Для двофазного статора:
Результуюча електромагнітна потужність з урахуванням (11.26), (11.27), після перетворень:
Обертаючий момент двигуна:
При коловому полі
де
Звідси відносна швидкість обертання ротора:
За формулою (11.32) можливо побудувати механічну ν(m) при
а) б) Рис. 11.12. Механічні (а) та регулювальні (б) характеристики двигуна
Зі зменшенням Точки перетинання кривих ν( Швидкість холостого ходу при m=0 з формули (11.32) дорівнює:
Потужності керування та збудження для ідеалізованого двигуна розраховуються таким чином. Струм є чисто активним. Тому, враховуючи (11.5),(11.8):
Струм керування, враховуючі (11.24), (11.25):
Тоді з (11.34), (11.36):
Напруги керування та збудження:
Струм збудження
Якщо поле колове, то в режимі пуску
Звідки
де Виходячи з формул (11.37), (11.41) та (11.43), відносні потужності
Співвідношення (11.44) свідчить про те, що зі зміненням Механічна потужність у відносних одиницях, виходячи з формули (11.31):
При фіксованому сигналі
Враховуючи (11.47) у (11.46), одержимо:
При холостому ході, коли Особливості роботи реального двигуна полягають у такому. Характеристики реального двигуна потрібно розглядати за певною схемою заміщення. Тому розглянемо основні відмінності характеристик реального двигуна у порівнянні з ідеалізованим. В реальному двигуні при
Зі збільшенням швидкості ν збільшується нерівність
Тому У зв'язку зі збільшенням опору на складову
а) б) в) Рис. 11.13. Характеристики реального двигуна механічна (а) регулювальна (б) погрішностей (в) у порівнянні з ідеалізованим
Регулювальні характеристики ν( Суттєвим недоліком є не лінійність характеристики ν( При малих сигналах
При цьому виникає погрішність:
Потужності Потужність обмотки керування
де
Фазове керування
При фазовому керуванні напруги фаз
Рис. 11.14. Векторна діаграма напруг при фазовому керуванні
Спрощуємо аналіз, вважаючи, що К=1,
Повні опори схем заміщення:
Зі співвідношень (11.54) – (11.57) струми дорівнюють:
Якщо розглядати ідеалізований двигун, то зі співвідношень (11.20) – (11.23):
Тоді з формул (11.58), (11.59), враховуючи (11.60), (11.61):
Зі співвідношень (11.26) – (11.28) одержимо з урахуванням (11.62), (11.63)
Електромагнітний момент, враховуючи (11.29):
При коловому полі (
Зі співвідношень (11.65), (11.66) відносний момент на валу двигуна:
а відносна швидкість обертання з (11.67):
Механічні та регулювальні характеристики наведені на рис. 11.15.
а) б) Рис. 11.15. Механічні (а) та регулювальні (б) характеристики двигуна при фазовому регулюванні
Залежності ν(m) подано паралельними та прямолінійними. При малих Для реального двигуна характеристики нелінійні, а швидкість Якщо ν=0, то повна потужність, яка споживається обмоткою керування
тобто не залежить від Перевага фазового керування – мала не лінійність механічної ν(m) та регулювальної
Просторове керування
В цьому випадку
а) б) Рис. 11.16. Схема вмикання двигуна (а) та векторна діаграма напруг (б) при просторовому керуванні
Коефіцієнт сигналу
0<
Для просторового керування дійсні ті ж співвідношення для моментів та потужностей, що й при фазовому керуванні із заміною Просторове керування звичайно здійснюється в двигунах з порожнистим ротором. При цьому на зовнішньому статорі встановлюється обмотка збудження, а на внутрішньому – обмотка керування. Поворотом внутрішнього статора відносно зовнішнього здійснюється регульований зсув між осями обмоток збудження та керування (рис.11.17).
Рис. 11.17. Просторове керування двигуном з порожнистим ротором
Амплітудно-фазове керування
Відповідно до рис.11.18 напруга
Рис. 11.18. Схема вмикання двигуна при амплітудно-фазовому керуванні
Зі зміною Якщо підібрати
Рис. 11.19. Векторна діаграма струмів та напруг при коловому полі
При цьому відсутня зворотна складова поля, а струми пов'язані співвідношеннями:
Підставляючи з (11.71) та (11.72) у (11.70) та порівнюючи уявні й дійсні частини окремо, одержимо:
Підставимо з (11.74) у (11.73) й одержимо:
З одержаних співвідношень для
а) б) Рис. 11.20. Механічні (а) та регулювальні (б) характеристики двигуна при амплітудно-фазовому керуванні
Отже, колове поле виникає лише при ν=0. Зі зменшенням α швидкості Не лінійність механічних характеристик ν(m) при амплітудно-фазовому керуванні більша, ніж при інших способах, у зв'язку зі збільшенням зворотної складової магнітного потоку Регулювальні характеристики ν(α) також нелінійні. Зі збільшенням швидкості обертання ν зростає потужність Основною складовою струму статора двигуна з порожнистим не магнітним ротором є намагнічуючий струм. Тому струм Перевагою цього способу керування є порівняна простота схеми й можливість одержання великих пускових моментів. Недолік – деяке зменшення стійкості при малих швидкостях обертання.
Комбіноване керування
Комбінований метод поєднує всі способи керування. Цей метод належить до просторових способів керування, оскільки здійснюється зміною просторового кута γ (рис.13.21).
Рис. 11.21. Комбіноване керування виконавчим двигуном
При зміні γ змінюються амплітуди й фази напруг
11.5. Порівняння різних методів керування асинхронними виконавчими двигунами Порівнюючи різні способи керування асинхронними виконавчими двигунами, можливо зробити деякі висновки. 1. Лінійність механічних та регулювальних характеристик найвища при фазовому керуванні. При цьому критерієм лінійності регулювальної характеристики слід брати рівняння (11.68). Найменша лінійність характеристики при амплітудно-фазовому керуванні. Всі початкові ділянки регулювальних характеристик (при малих швидкостях ν) практично лінійні. Якщо їх використати як робочі ділянки, то для одержання необхідних кутових швидкостей 2. Потужність обмотки керування 3. Ступенем використання двигуна вважається електромагнітна потужність Якщо напруги збудження однакові, то ступінь використання для всіх способів однакова. Для всіх методів керування зі зменшенням коефіцієнта сигналу α зменшується потужність 4. Керуючий сигнал зрушення при всіх способах керування пропорційний моментові опору на валу. 5. Найвищий cosφ=0.8-0.25 виникає у двигунів з амплітудно-фазовим керуванням за рахунок вмикання конденсатора. 6. Найпростішим є амплітудно-фазове керування (конденсаторна схема), при якому не потрібні додаткові пристрої для зсуву фаз між напругами В кожному конкретному випадку вибір способу керування повинен визначатись умовами роботи системи, елементом якої є двигун, та вимогами до цього елемента. На закінчення розглянемо залежність електромеханічної сталої часу
При амплітудному керуванні з урахуванням формул (11.19), (11.33) можливо записати:
Визначимо залежність пускового моменту
При пуску ν=0, | ||
|
| Поделиться: |

 може вважатись дорівнюючою втратам на тертя в роторі об повітря.
може вважатись дорівнюючою втратам на тертя в роторі об повітря. .
.
 подати змінну напругу керування
подати змінну напругу керування  , зсунуту відносно напруги збудження
, зсунуту відносно напруги збудження  , то в двигуні виникає обертаючий момент
, то в двигуні виникає обертаючий момент  . При подачі напруги
. При подачі напруги  момент змінить свій знак. Якщо обмотки
момент змінить свій знак. Якщо обмотки 

 , що дуже важливо у зв'язку з обмеженою потужністю джерела керуючого сигналу.
, що дуже важливо у зв'язку з обмеженою потужністю джерела керуючого сигналу.
 (11.5)
(11.5) (11.6)
(11.6)
 (11.7)
(11.7)
 ,
, (11.8)
(11.8) (11.9)
(11.9) (11.10)
(11.10) (11.11)
(11.11) (11.12)
(11.12) ,
,  - повні опори відповідних схем заміщення (рис.11.10).
- повні опори відповідних схем заміщення (рис.11.10).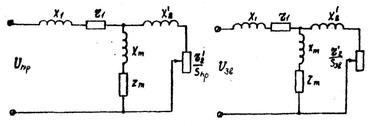

 (11.13)
(11.13) (11.14)
(11.14) (11.15)
(11.15) (11.16)
(11.16) (11.17)
(11.17) (11.18)
(11.18) . (11.19)
. (11.19)
 (11.20)
(11.20) (11.21)
(11.21) (11.22)
(11.22) (11.23)
(11.23) (11.24)
(11.24) (11.25)
(11.25) (11.26)
(11.26) (11.27)
(11.27) . (11.28)
. (11.28) . (11.29)
. (11.29) та ν=0:
та ν=0: (11.30)
(11.30) - момент на валу двигуна при короткому замкненні. Тоді відносний момент дорівнює:
- момент на валу двигуна при короткому замкненні. Тоді відносний момент дорівнює: (11.31)
(11.31) (11.32)
(11.32) та регулювальну ν(
та регулювальну ν( ) при m=const характеристики для ідеалізованого двигуна (рис.11.12).
) при m=const характеристики для ідеалізованого двигуна (рис.11.12).
 механічні характеристики стають більш м'якими, що є недоліком асинхронного двигуна, оскільки це призводить до нелінійності регулювальних характеристик.
механічні характеристики стають більш м'якими, що є недоліком асинхронного двигуна, оскільки це призводить до нелінійності регулювальних характеристик. (11.33)
(11.33) (11.34)
(11.34) (11.35)
(11.35) (11.36)
(11.36) (11.37)
(11.37) (11.38)
(11.38) (11.39)
(11.39) зсунутий відносно напруги
зсунутий відносно напруги  на 90º. Тому, враховуючи формули (11.24), (11.25), (11.35), після перетворень одержуємо:
на 90º. Тому, враховуючи формули (11.24), (11.25), (11.35), після перетворень одержуємо: ; (11.40)
; (11.40) (11.41)
(11.41) ,
,  . Тоді
. Тоді (11.42)
(11.42) (11.43)
(11.43) - потужність, споживана двигуном у режимі короткого замкнення.
- потужність, споживана двигуном у режимі короткого замкнення. ; (11.44)
; (11.44) (11.45)
(11.45) , тому при малих значеннях
, тому при малих значеннях  споживана потужність мала. З формули (11.45) витікає, що при пуску
споживана потужність мала. З формули (11.45) витікає, що при пуску  не залежить від
не залежить від  (11.46)
(11.46) виникає при деякій швидкості обертання
виникає при деякій швидкості обертання  , яка може бути визначена дослідженням (11.46) на максимум функції
, яка може бути визначена дослідженням (11.46) на максимум функції  та враховуючі (11.33):
та враховуючі (11.33): (13.47)
(13.47) (11.48)
(11.48) (11.19),
(11.19),  . Зі зменшенням
. Зі зменшенням  більша, ніж в ідеалізованому, оскільки опір
більша, ніж в ідеалізованому, оскільки опір  впливає на струм
впливає на струм  більше, ніж на
більше, ніж на  . Зі схеми заміщення рис. 11.10 одержуємо вирази для струмів ротора:
. Зі схеми заміщення рис. 11.10 одержуємо вирази для струмів ротора: (11.49)
(11.49) (11.50)
(11.50)
 зростає, а
зростає, а  зменшується. Тому в реальному двигуні зворотний магнітний потік
зменшується. Тому в реальному двигуні зворотний магнітний потік  менший, ніж в ідеалізованому.
менший, ніж в ідеалізованому. зменшується
зменшується 
 може бути досягнута при менших сигналах
може бути досягнута при менших сигналах  :
: (11.51)
(11.51) (11.52)
(11.52) реального двигуна суттєво відрізняються від потужностей ідеалізованого двигуна, оскільки в останньому випадку не враховувався струм холостого ходу, який для двигуна з порожнистим ротором становить
реального двигуна суттєво відрізняються від потужностей ідеалізованого двигуна, оскільки в останньому випадку не враховувався струм холостого ходу, який для двигуна з порожнистим ротором становить  , де
, де  - номінальний струм. Тому можливо вважати потужність обмотки збудження
- номінальний струм. Тому можливо вважати потужність обмотки збудження  при будь-яких
при будь-яких  сильно залежить від
сильно залежить від  , (11.53)
, (11.53) - повний опір обмотки керування.
- повний опір обмотки керування. , а кут між векторами
, а кут між векторами  дорівнює β.
дорівнює β.
 . З векторної діаграми рис.11.14 можливо записати:
. З векторної діаграми рис.11.14 можливо записати: (11.54)
(11.54) (11.55)
(11.55) ; (11.56)
; (11.56) . (11.57)
. (11.57) (11.58)
(11.58) (11.59)
(11.59) (11.60)
(11.60) (11.61)
(11.61) (11.62)
(11.62) (11.63)
(11.63) . (11.64)
. (11.64) (11.65)
(11.65) ) та ν=0 момент на валу двигуна при короткому замкненні:
) та ν=0 момент на валу двигуна при короткому замкненні: (11.66)
(11.66) , (11.67)
, (11.67) (11.68)
(11.68)
 більший, ніж при амплітудному. Регулювальні характеристики
більший, ніж при амплітудному. Регулювальні характеристики  при фазовому регулюванні також лінійні.
при фазовому регулюванні також лінійні. більша, ніж у ідеалізованого двигуна, що пояснюється впливом індуктивного опору
більша, ніж у ідеалізованого двигуна, що пояснюється впливом індуктивного опору  ,
, є великою при малих
є великою при малих  ;
;  , а просторовий кут
, а просторовий кут  . Керування швидкістю обертання здійснюється зміною просторового кута γ між осями обмоток збудження та керування (рис.11.16).
. Керування швидкістю обертання здійснюється зміною просторового кута γ між осями обмоток збудження та керування (рис.11.16).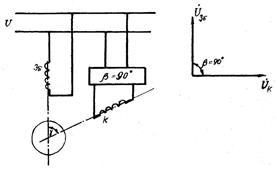
 . Форма поля залежить від
. Форма поля залежить від  :
: на
на  .
.
 має таку ж фазу, як живляча напруга
має таку ж фазу, як живляча напруга  , тобто
, тобто  , а
, а . (11.69)
. (11.69)
 .
.
 (11.70)
(11.70) (11.71)
(11.71) (11.72)
(11.72) (11.73)
(11.73) (11.74)
(11.74) (11.75)
(11.75) видно, що визначити
видно, що визначити  можливо тільки для реального двигуна, коли
можливо тільки для реального двигуна, коли  . Тому ідеалізація у даному випадку застосовуватись не може. Звичайно
. Тому ідеалізація у даному випадку застосовуватись не може. Звичайно  (11.76)
(11.76) . (11.77) В реальному виконавчому двигуні з амплітудно-фазовим керуванням регулюється напруга
. (11.77) В реальному виконавчому двигуні з амплітудно-фазовим керуванням регулюється напруга  . При цьому струм збудження
. При цьому струм збудження  практично змінюється дуже мало у зв'язку з великою складовою намагнічуючого струму, яка залишається незмінною. Тому характеристики ν(m) та ν(α) при цьому способі керування (рис.11.20, суцільні лінії) подібні до відповідних характеристик при амплітудному керуванні.
практично змінюється дуже мало у зв'язку з великою складовою намагнічуючого струму, яка залишається незмінною. Тому характеристики ν(m) та ν(α) при цьому способі керування (рис.11.20, суцільні лінії) подібні до відповідних характеристик при амплітудному керуванні.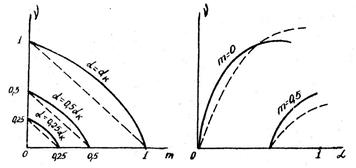
 , оскільки дещо збільшується напруга
, оскільки дещо збільшується напруга  зі зміною режиму роботи змінюється мало, а потужність
зі зміною режиму роботи змінюється мало, а потужність 
 . Якщо параметри двигуна визначені певним чином, то жорсткість механічної характеристики ν(m) не буде змінюватись при зміні α.
. Якщо параметри двигуна визначені певним чином, то жорсткість механічної характеристики ν(m) не буде змінюватись при зміні α. необхідно збільшувати частоту живлячої мережі. Це призводить до збільшення кутової швидкості обертового поля
необхідно збільшувати частоту живлячої мережі. Це призводить до збільшення кутової швидкості обертового поля  та зменшення швидкості ν й сигналу α, що збільшує еліптичність поля й зменшує ККД двигуна.
та зменшення швидкості ν й сигналу α, що збільшує еліптичність поля й зменшує ККД двигуна. . При фазовому керуванні величина α практично не впливає на потужність
. При фазовому керуванні величина α практично не впливає на потужність  при коловому полі й нерухомому роторі, яка припадає на одиницю об'єму.
при коловому полі й нерухомому роторі, яка припадає на одиницю об'єму. . При великих α найбільша потужність
. При великих α найбільша потужність  виникає при амплітудно-фазовому керуванні.
виникає при амплітудно-фазовому керуванні. від амплітуди й фази сигналу керування. За формулою (11.4):
від амплітуди й фази сигналу керування. За формулою (11.4): .
. (11.78)
(11.78) від
від  .
.


