
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Загальна характеристика, застосування та класифікація машин систем синхронної передачіСодержание книги
Поиск на нашем сайте
У промисловості та спеціальній техніці розповсюджені електричні системи синхронної передачі, які застосовуються в системах автоматичного регулювання. Системою синхронної передачі називають сукупність пристроїв, призначених для вимірювання й передачі на відстань кутових переміщень механічно не з’єднаних осей. Якщо синхронний зв'язок використовується для передачі кута, то основне значення має синфазність. В тому разі, коли цей зв'язок використовується для передачі синхронного обертання, основним показником є синхронність. При визначенні синфазності застосовується деяке початкове розташування осей, від якого відраховуються всі кути:
З виразів (16.1), (16.2) випливає, що синфазність передбачає синхронне обертання осей:
Формули (16.3), (16.4) свідчать про те, що синхронне обертання осей можливе й при швидкостях n≠const. У загальному випадку синхронна система передачі складається з таких елементів: пристрій, який задає кут (датчик); лінія передачі (зв’язку); пристрій, який сприймає передану величину (приймач). Синхронні системи передачі звичайно мають різні електричні машини й реле. В системах малої потужності переважно розповсюджені індукційні (асинхронні) машини, які працюють в режимі подвоєного живлення. Ці машини, які за певних схем з’єднання можуть самосинхронізуватись, одержали назву сельсинів (від англійських слів self sinchroniring – «самосинхронізуючий»). Індукційні системи синхронної передачі поділяють на однофазні й трифазні. Однофазні найчастіше застосовують в установках малої потужності. В потужних установках для синхронізації кількох обертових валів двигунів, які механічно не пов’язані між собою, застосовують трифазні системи синхронної передачі (приводи розвідних мостів, затворів шлюзів і т. і.). Основними перевагами індукційних систем синхронної передачі є такі. 1. Відсутність іскрової комутації. 2. Висока точність (похибка в передачі кута не більша від 2,5º). 3. Плавність відпрацювання сигналу. 4. Можливість застосування безконтактної системи. 5. Однотипність датчиків та приймачів. Однофазна індукційна система синхронної передачі може працювати в двох основних режимах: індикаторному й трансформаторному. В індикаторному режимі основною характеристикою є синхронізуючий момент, який з’являється внаслідок електромагнітних процесів у синхронній передачі, тому такий режим іноді називають режимом з внутрішньою синхронізацією. В трансформаторному режимі вихідна напруга приймача є основною характеристикою, у зв’язку з чим такий режим називають режимом із внутрішньою синхронізацією. У відповідності з цим індукційні системи синхронної передачі застосовують, як: 1) індикаторні й вимірювальні пристрої; 2) пристрої безпосереднього керування (приймач діє на керуючий орган: повзунок реостата, контакти і т. д.); 3) пристрої дистанційного керування (сигнал від приймача, який працює в трансформаторному режимі, подається на підсилювач). Синхронні передачі, зокрема, сельсини в різних режимах роботи застосовуються в сучасних пристроях автоматики, телемеханіки, рахунково-вирішуючої техніки, автоматизованого електропривода, спецтехніки і т. д. Трифазні сельсини застосовуються у відносно потужних системах електричного валу. При цьому потужність допоміжних двигунів-сельсинів беруть 10÷15% від потужності, яка передається валом. В такій передачі (паперовиробні машини, портальні крани і т. і.) кожна з машин виконує функції датчика та приймача, взаємно коригуючи положення обох валів. Машини, які працюють у такій передачі, найчастіше не називають сельсинами, хоча за будовою та принципом здійснення зв’язку вони від сельсинів нічим не відрізняються. Трифазні сельсини розташовуються на валах головних двигунів і звичайно вмикаються на обертання проти поля, тобто з ковзанням Ѕ≥1, для одержання більшого діапазону швидкостей та точності синхронізації. В рахунково-вирішуючих пристроях, слідкуючому електроприводі, де повинен відпрацьовуватись кут, який дорівнює сумі або різниці двох заданих кутів (наприклад, уведення поправок на швидкість польоту), застосовується система синхронної передачі кута, в якій як один з елементів використовується диференціальний сельсин (сельсин-диференціал). В літакових та інших пристроях для передачі кута на невеликі відстані при малих значеннях моменту опору застосування контактних та безконтактних сельсинів не завжди можливе. Це пояснюється необхідністю мінімальної маси та розмірів, а також тим, що момент тертя контактного сельсина в підшипниках та щітковому контакті й момент опору можуть бути величинами одного порядку, тобто виникає велика погрішність. Тому для цього застосовують магніто-електричний безконтактний сельсин – магнесин, який має мінімальну масу й габарити та простий за конструкцією. Точність синхронної передачі визначається кутом непогодження θ між кутовими положеннями роторів приймача та датчика. Якщо ці ротори після відпрацювання сигналу приходять до фіксованого нерухомого стану, то такий режим називається режимом повороту, а кут θ – статичною похибкою системи. Якщо ж ротор обертається з деякою швидкістю, то такий режим називається динамічним (режимом обертання), а кут θ – динамічною похибкою системи. До систем синхронної передачі ставляться такі основні вимоги. 1. Точність передачі кута. 2. Достатня величина питомого синхронізуючого моменту Мсп на валу приймача. 3. Великий максимальний синхронізуючий момент Мсmах при найбільшому куті непогодження θmах. 4. Максимальна допустима швидкість обертання. 5. Малий час установлення ротора приймача. Сельсини, які використовуються в індукційних системах синхронного зв’язку, поділяються на трифазні силові та однофазні. За конструктивним виконанням вони можуть бути контактними і безконтактними. За призначенням їх поділяють на датчики й приймачі. За особливостями застосування вони поділяються на індикаторні, трансформаторні й диференціальні. Безконтактні сельсини, в свою чергу, поділяються за способом збудження (електромагнітне й магнітоелектричне) та конструктивними особливостями (із Z-подібним ротором, з винесеним зовнішнім магнітним ланцюгом, з трансформаторним збудженням). В залежності від конструкції, режиму роботи та призначення сельсини характеризуються різними показниками. В індикаторному режимі ККД сельсина має максимум при θ=90º, а в робочому режимі не перевищує 0,1. При θ=180º ККД дорівнює нулеві. Найбільше значення Cosφ виникає при θ=180º, а найменше – при θ=0º та θ=360º. При θ<5º Cosφ=0,25÷0,35. Питомий синхронізуючий момент Мсп=(0,1÷5,0)·10-3 Н·м/град, а максимальний синхронізуючий момент Мсmах=(5÷30) 10-3 Н·м/град. Чутливість трансформаторних сельсинів визначається вихідною напругою при куті непогодження θ=1º. Звичайно ця напруга U2п=0,5÷1,5 В/град. Залишкова напруга трансформаторного сельсина (коли вісь ротора приймача становить 90º з віссю ротора датчика) не перевищує Uзл=0,2÷0,5 В. Для магнесинів при номінальній напрузі живлення погрішність при слідкуванні не перевищує 2,5%, а при зниженій напрузі до 70% від номінальної – 5%. Синхронізуючий момент для магнесинів звичайно дорівнює Мс=0,1 мГ·см. Промисловістю випускаються сельсини, які працюють в широкому діапазоні температур: - 60ºС ÷ +50ºС з відносною вологістю повітря до 98%, в умовах висотності й підвищених вібрацій.
Трифазні синхронні передачі
Трифазні сельсини конструктивно такі ж, як і звичайні асинхронні двигуни з фазним ротором та розподіленими обмотками. Статорна обмотка, тобто обмотка збудження, приєднується до трифазної мережі з постійною частотою напруги. Роторна обмотка є обмоткою синхронізації, яка через контактні кільця та щітки з’єднується з лінією зв’язку. Схема трифазної синхронної передачі подана на рис.16.1. Обмотки синхронізації сельсина вмикаються зустрічно з додержанням послідовності чергування фаз (як і при вмиканні на паралельну роботу синхронних генераторів).
Рис. 16.1. Схема вмикання трифазної синхронної передачі
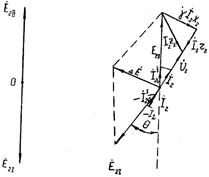
Якщо обмотки роторів обох машин будуть розташовані у просторі однаково відносно своїх статорних обмоток, тобто кут непогодження θ=0, то ЕРС роторних обмоток, які виникають під дією обертових магнітних полів статорів, будуть рівними за величинами й протилежні за знаками. а) б) Рис. 16.2. Векторна діаграма для трифазних сельсинів Тому зрівняльні струми в ланцюгах роторів проходити не будуть. Для цього випадку векторна діаграма наведена на рис.16.2, а. У зв’язку з відсутністю струму ротора машини не створюють обертових моментів, тому ротори залишаються в спокої при будь-якому положенні обмоток роторів по відношенню до обмоток статорів при θ=0. при цьому по обмотках статорів проходять струми холостого ходу, які вміщують реактивну (намагнічуючу) та активну (яка визначається втратами холостого ходу) складові. З появою кута непогодження θ ЕРС Е2I та Е2II зсовуються між собою за фазою на кут рθ (р – число пар полюсів машини). Векторна діаграма для цього випадку подана на рис.16.2, б. Вона побудована за рівняннями:
2. де z2І, z 2ІІ – опори вторинних ланцюгів машин І, ІІ в режимі короткого замкнення; İ2 – зрівняльний стум, виникаючий в роторному ланцюзі під дією ΔĖ. Якщо машини однакові, то z 2І = z2ІІ = z2; Е2І = Е2ІІ = Е2. Тому
Струм первинного ланцюга:
Нехтуючи спадом напруги в первинній обмотці від струму намагнічування Іm, тобто вважаючи
Оскільки в машинах середньої й великої потужності r2<<x2, можливо вважати в цих випадках z2≈x2, тобто з рівняння 2 системи (16.5) одержимо:
Тому вектор струму İ2 відстає від ΔĖ на 90º. Якщо активна складова струму İ2а співпадає за фазою з вектором Ė2 якоїсь з машин, то ця машина працює в генераторному режимі (датчика). Якщо ж İ2а та Ė2 у протифазі (- İ2а та Ė2), то машина працює в двигуновому режимі (приймач). В залежності від кута θ (поворот за чи проти поля статора) будь-яка з машин може бути як датчиком, так і приймачем. У зв’язку з тим, що активна складова струму для машин має різні знаки, машини створюють моменти різних знаків, які намагаються звести кут θ до нуля поворотом обох роторів у протилежних напрямах. Якщо ротор датчика буде безперервно обертатись, то ротор приймача буде рухатися за ним синхронно й синфазно з деякою погрішністю, яка визначається кутом θ. Суттєвим недоліком трифазної системи синхронної передачі є неоднакова залежність М(θ) при обертанні приймача за та проти напряму обертання поля статора. З рис.16.1 на рис. 16.3 подана енергетична діаграма при повороті ротора приймача на кут θ по (суцільні стрілки) та проти (штрихові стрілки) поля статора. Припустимо, що машина ІІ є приймачем. Тоді при повороті ротора приймача за полем статора передача потужності здійснюється від машини І до машини ІІ.
Рис. 16.3. Енергетична діаграма трифазних сельсинів
Електромагнітна потужність приймача РеІІ для цього випадку:
де РІ – потужність, споживана машиною І від мережі; РсІ – втрати потужності в статорі машини І; РрІ, РрІІ - втрати потужності в роторі відповідно І та ІІ машин. При повороті ротора приймача проти поля статора:
де РІІ – потужність, споживана машиною ІІ від мережі; РсІІ – втрати потужності в статорі машини ІІ Віднімаємо (16.9) з (16.10). Тоді:
тобто
на подвоєну величину втрат в роторах та в сталі статора датчика. Тому електромагнітні моменти
тобто при повороті ротора приймача проти поля він створює більший момент, ніж за полем. Визначаючи аналогічно електромагнітні моменти, з урахуванням рис.16.3, можливо довести, що при повороті ротора машини І за полем, а ротора машини ІІ – проти поля (компенсація θ) МІ<МІІ. При поворотах роторів у інших напрямах МІ>МІІ. При повороті ротора датчика в будь-який бік він буде відчувати момент проти напряму повороту, а ротор приймача – за напрямом повороту. Не однаковість моментів, які створюються датчиком та приймачем при різних напрямах обертання, обумовлює різну точність синхронної передачі кута при одному й тому ж навантажувальному моменті. Як це витікає з кривої М(θ) (рис.16.4), при обертанні ротора проти поля діапазон можливих кутів непогодження ширший, ніж за полем.
Рис. 16.4. Кутові характеристики трифазних сельсинів
|
||||
|
|
Последнее изменение этой страницы: 2016-07-11; просмотров: 329; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.25.125 (0.036 с.) |

 , (16.1)
, (16.1) . (16.2)
. (16.2) , (16.3)
, (16.3) . (16.4)
. (16.4)
 1.
1.  ;
; , (16.5)
, (16.5) . (16.6)
. (16.6) . (16.7)
. (16.7) , та враховуючи, що
, та враховуючи, що  , одержимо:
, одержимо: . (16.7)
. (16.7) . (16.8)
. (16.8)
 , (16.9)
, (16.9) , (16.10)
, (16.10) , (16.11)
, (16.11) >
> 
 >
>  ,
,



