
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поступательное и вращательное движения твёрдого телаСодержание книги
Поиск на нашем сайте
Поступательным движением твёрдого тела называется такое движение, при котором любая прямая, проведенная в теле, остается параллельной самой себе при движении тела. Поступательно движется, например, кузов экипажа 1 на прямолинейном участке пути (рис. 8).
Основная теорема поступательного движения твёрдого тела При поступательном движении все точки тела движутся по одинаковым, при наложении совпадающим траекториям и имеют в данный момент времени одинаковые скорости и ускорения по модулю и направлению. Согласно основной теореме поступательного движения твёрдого тела, для звена
Из основной теоремы поступательного движения твёрдого тела следует, что для описания такого движения достаточно задать движение любой точки тела, например центра тяжести
являются уравнениями поступательного движения твёрдого тела. Вращательным движением твёрдого тела называется такое движение, при котором остаются неподвижными все точки тела, лежащие на некоторой прямой, называемой осью вращения (ось
Угол поворота
Кроме угла поворота Угловой скоростью
Угловая скорость
Если угловая скорость Угловым ускорением
Угловое ускорение Если в данный момент времени
Рассмотрим частные случаи вращательного движения твёрдого тела. 1. Равномерное вращение тела. В этом случае угловая скорость тела
где Выражение (2.8) является законом равномерного вращения твёрдого тела. 2. Равнопеременное вращение тела. В этом случае угловое ускорение
где После повторного интегрирования получим
Выражения (2.9) и (2.10) определяют законы изменения угловой скорости и угла поворота в случае равнопеременного вращения твёрдого тела. 3. Общий случай вращательного движения тела. В этом случае угловое ускорение тела
После интегрирования выражения (2.11) (см. случаи 1 и 2) получаем закон изменения угловой скорости
После интегрирования выражения (1.12) найдём закон вращения тела в рассматриваемом случае
При вращательном движении модуль скорости любой точки
В выражении (2.14) Вектор скорости Указанные модуль и направление вектора скорости
где Вектор Ускорение
где
Из выражения (2.16) следует, что направление вектора ускорения На рис. 12 при этом Согласно выражению (2.19), векторы ускорения всех точек тела при вращательном движении наклонены к соответствующим радиусам вращения под одним и тем же углом Рассмотрим наиболее характерные примеры решения задач на вращательное движение тела.
Находим угловую скорость
При
Знак «–» указывает на то, что
где
Тогда Вектор
Вращательное ускорение
Вектор Центростремительное ускорение
Вектор Ускорение точки
Вектор
Пример 2. Кривошип
Поскольку звено
Скорость Ускорение где Тогда Вектор Следовательно,
Пример 3. Диск начинает вращаться равноускоренно из состояния покоя, сделав за первые две секунды 10 оборотов. Определить угловую скорость При решении задач на частные случаи вращения тела необходимо записать выражения, по которым определяются угловая скорость
По условию задачи
Угол поворота
При
Пример 4. Тело вращается вокруг неподвижной оси с угловым ускорением Данный пример относится к общему случаю вращения твёрдого тела, поэтому законы изменения
По условию задачи Тогда угловая скорость тела
Закон вращения тела:
|
||||
|
|
Последнее изменение этой страницы: 2016-04-25; просмотров: 385; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.211.55 (0.008 с.) |

 В механизме шарнирного четырёхзвенника
В механизме шарнирного четырёхзвенника  (звено 4 –стойка, неподвижное) (рис. 9), если
(звено 4 –стойка, неподвижное) (рис. 9), если  и
и  , звено
, звено  движется поступательно.
движется поступательно. ;
;  . (2.1)
. (2.1) . Тогда выражения
. Тогда выражения ,
,  ,
,  (2.2)
(2.2) на рис. 10).
на рис. 10).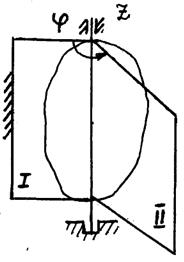 Для задания положения тела при вращательном движении служит угол поворота
Для задания положения тела при вращательном движении служит угол поворота  между условно неподвижной плоскостью I (рис. 10) и подвижной плоскостью II, связанной с телом. Угол поворота тела
между условно неподвижной плоскостью I (рис. 10) и подвижной плоскостью II, связанной с телом. Угол поворота тела  (2.3)
(2.3) называется уравнением вращательного движения твёрдого тела.
называется уравнением вращательного движения твёрдого тела. оборотов, то угол его поворота определяется выражением
оборотов, то угол его поворота определяется выражением . (2.4)
. (2.4) и угловое ускорение
и угловое ускорение  .
. . (2.5)
. (2.5) оборотов в минуту (
оборотов в минуту ( . (2.6)
. (2.6) . (2.7)
. (2.7) , то оно направлено в сторону заданного направления отсчёта угла поворота φ, если
, то оно направлено в сторону заданного направления отсчёта угла поворота φ, если  – в противоположную сторону.
– в противоположную сторону. Когда направления
Когда направления  вокруг оси
вокруг оси  , на рис. 11в,г – случаи замедленного вращения.
, на рис. 11в,г – случаи замедленного вращения. . Тогда угловое ускорение
. Тогда угловое ускорение  . Учитывая, что
. Учитывая, что  . Интегрируя данное выражение
. Интегрируя данное выражение  ,получаем:
,получаем: , (2.8)
, (2.8) – угол поворота тела при
– угол поворота тела при  .
. (знак «+» относится к случаю ускоренного вращения, знак «–» – замедленного). Учитывая, что
(знак «+» относится к случаю ускоренного вращения, знак «–» – замедленного). Учитывая, что  , получаем:
, получаем:  . Интегрируем данное выражение
. Интегрируем данное выражение  . Получаем
. Получаем , (2.9)
, (2.9) – угловая скорость тела при
– угловая скорость тела при  . (2.10)
. (2.10)
 . (2.11)
. (2.11) . (2.12)
. (2.12) . (2.13)
. (2.13) (рис. 12) тела равен
(рис. 12) тела равен
 . (2.14)
. (2.14) – радиус вращения точки – перпендикуляр, опущенный из точки
– радиус вращения точки – перпендикуляр, опущенный из точки  лежит в плоскости траектории точки
лежит в плоскости траектории точки  в сторону круговой стрелки
в сторону круговой стрелки  (рис. 12), проведенный из некоторой точки
(рис. 12), проведенный из некоторой точки  ):
): , (2.15)
, (2.15) – вектор угловой скорости.
– вектор угловой скорости. точки
точки  , (2.16)
, (2.16) – вращательное ускорение;
– вращательное ускорение;  – центростремительное ускорение. Векторы
– центростремительное ускорение. Векторы  ; (2.17)
; (2.17) . (2.18)
. (2.18) в сторону круговой стрелки
в сторону круговой стрелки  , то модуль полного ускорения
, то модуль полного ускорения  .
. – угол между вектором
– угол между вектором  , откуда
, откуда  ,
, . (2.19)
. (2.19)
 Пример 1. Диск (рис. 13) радиусом
Пример 1. Диск (рис. 13) радиусом  м вращается по закону
м вращается по закону  (
( , совпадающей с его горизонтальным диаметром. Для момента времени
, совпадающей с его горизонтальным диаметром. Для момента времени  с определить скорость и ускорение точки
с определить скорость и ускорение точки  обода диска.
обода диска. .
. рад/с. Так как при
рад/с. Так как при  .
. м.
м. м/с.
м/с. .
. м/с².
м/с². м/с².
м/с². м/с².
м/с². ммеханизма шарнирного четырёхзвенника
ммеханизма шарнирного четырёхзвенника  рад/с².
рад/с².
 Определить скорость и ускорение центра тяжести
Определить скорость и ускорение центра тяжести  ,
,  и
и  и
и  .
. м/с;
м/с;  направлен
направлен  в сторону
в сторону  ,
, м/с²;
м/с²;  направлен
направлен  м/с²;
м/с²;  направлен по
направлен по  м/с².
м/с². направлен по диагонали параллелограмма, построенного на векторах
направлен по диагонали параллелограмма, построенного на векторах  м/с;
м/с;  м/с².Векторы
м/с².Векторы  и
и  направлены параллельно соответственно векторам
направлены параллельно соответственно векторам  .
. с.
с. и
и  .
. ,
,  , так как вращение диска начинается из состояния покоя. Тогда в рассматриваемом случае
, так как вращение диска начинается из состояния покоя. Тогда в рассматриваемом случае ,
,  .
. оборотов. Тогда угловое ускорение
оборотов. Тогда угловое ускорение рад/с².
рад/с². угловая скорость диска
угловая скорость диска  рад/си
рад/си  рад/с.
рад/с. рад/с². Определить законы изменения угловой скорости
рад/с². Определить законы изменения угловой скорости  ,
,  .
. .
. .
.


