Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система управления АСМ при работе контактном режимеСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
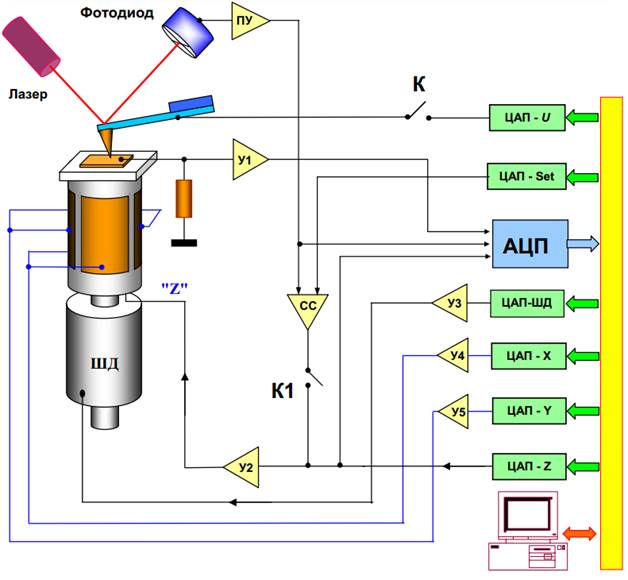
Упрощенная схема системы управления АСМ при работе кантилевера в контактном режиме представлена на рисунке 15. Система управления состоит из цифровой части, реализованной на базе персонального компьютера, и аналоговой части, выполняемой обычно в виде отдельного блока. Цифровая часть содержит, в основном, цифро-аналоговые (ЦАП) и аналого-цифровые (АЦП) преобразователи. Двухканальные цифро-аналоговые преобразователи ЦАП-X и ЦАП-У служат для формирования строчных и кадровых разверток. Петля обратной связи состоит из фотодиода (ФД), предварительного усилителя ПУ, конструктивно расположенного в измерительной головке АСМ, схемы сравнения (СС), высоковольтного усилителя У2 и пьезопреобразователя, регулирующего величину изгиба кантилевера, а следовательно, силу взаимодействия зонда с поверхностью. В исходном состоянии электронный ключ К1 замкнут, а К2 разомкнут. Перед началом работы оператор юстирует оптическую схему системы регистрации отклонения кантилевера таким образом, чтобы ток с различных секторов фотодиода был равным, а его величина максимальной. Затем с помощью ЦАП–Set устанавливается напряжение, пропорциональное рабочему значению отклонения кантилевера ∆Z, которое будет поддерживаться постоянным системой обратной связи. После этого включается система сближения зонда и образца. При этом управляющее напряжение с ЦАП–ШД подается на шаговый двигатель (ШД). В начальном состоянии напряжение в петле обратной связи (пропорциональное разности токов между вертикальными секторами фотодиода) меньше, чем значение, установленное оператором с помощью ЦАП–Set, и сканер максимально вытянут в направлении зонда. При подходе образца к зонду кантилевер изгибается, появляется разностный ток с фотодиода, и система сближения переходит к процедуре точной установки образца. В этом режиме происходит дальнейшее движение образца к зонду с помощью двигателя и одновременное отодвигание его с помощью сканера (ОС поддерживает постоянным изгиб кантилевера) до тех пор, пока плоскость поверхности образца не достигнет положения, соответствующего середине динамического диапазона перемещений сканера. После этого микроскоп готов к работе.
Рисунок 15 - Упрощенная схема системы управления атомно-силового микроскопа при работе кантилевера в контактном режиме
Сканирование образца осуществляется при подаче напряжений пилообразной формы на внешние электроды трубчатого сканера с помощью двухканальных ЦАП – Х и ЦАП – У и двухканальных высоковольтных усилителей У4, У5. При этом в петле обратной связи поддерживается постоянным выбранное оператором значение разностного тока фотодиода, соответствующее определенной величине изгиба кантилевера. При сканировании образца в режиме Fz = const напряжение на Z-электроде сканера пропорционально рельефу поверхности. Это происходит следующим образом. Реальное мгновенное значение напряжения U, пропорциональное разностному току ФД, сравнивается в схеме сравнения (СС) с величиной U0, задаваемой оператором. Разностный сигнал (U-U0) усиливается (усилитель У2) и подается на внутренний Z-электрод сканера. Сканер отрабатывает данный сигнал до тех пор, пока разность (U-U0) не станет равной нулю. Таким образом, при сканировании напряжение на Z-электроде сканера оказывается пропорциональным рельефу поверхности. Сигнал с выхода схемы сравнения записывается с помощью АЦП как информация о рельефе поверхности. В выбранной точке образца можно снять зависимость величины изгиба кантилевера от расстояния между зондовым датчиком и поверхностью: ∆Z = f(z). Для этого обратная связь разрывается с помощью электронного ключа К1, и на Z-электрод сканера подается напряжение пилообразной формы с ЦАП-Z. Синхронно с изменением напряжения АЦП записывает напряжение на выходе предварительного усилителя ПУ, которое пропорционально отклонению кантилевера, а следовательно, силе взаимодействия зонда с поверхностью. Полученные данные преобразуются в зависимость ∆Z = f(z), которая затем строится с помощью средств компьютерной графики. Получение АСМ изображения при постоянном среднем расстоянии между зондовым датчиком и образцом Zср=const происходит следующим образом. Вначале снимается зависимость ∆Z = f(z) и определяется точное положение зонда над поверхностью. Затем обратная связь разрывается, и с помощью ЦАП-Z выставляется выбранное оператором значение расстояния зонд-поверхность. После этого производится сканирование образца, и величина напряжения с выхода предварительного усилителя, пропорциональная отклонению кантилевера, записывается в виде файла распределения силы вдоль поверхности образца F(x,y). При использовании кантилеверов с проводящим покрытием возможна регистрация вольт-амперных характеристик контакта зонд-образец в выбранной точке поверхности. Для получения ВАХ ключ К2 замыкается, и напряжение пилообразной формы подается с ЦАП-U на кантилевер. Синхронно с этим напряжение, пропорциональное току через контакт, усиливается (усилитель У1), записывается с помощью АЦП в память компьютера и визуализируется средствами компьютерной графики.
Колебательные методики АСМ
Для исследования образцов, обладающих малой механической жесткостью, применяются колебательные АСМ методики, основанные на регистрации параметров взаимодействия колеблющегося кантилевера с поверхностью. Данные методики позволят существенно уменьшить механическое воздействие зонда на поверхность в процессе сканирования. Кроме того, развитие колебательных методик существенно расширило арсенал возможностей АСМ по измерению различных свойств поверхности образцов.
|
||
|
|
Последнее изменение этой страницы: 2016-04-23; просмотров: 731; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.008 с.) |