Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Проверка устойчивости внутреннего контураСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
ЛАЧХ внутреннего контура может быть получена т.е. из ЛАЧХ неизменяемой части, скорректированной последовательным устройством MHPLQDE необходимо вычесть среднечастотную часть желаемой ЛАЧХ – ApBC. Из рисунка видно, что ЛАЧХ внутреннего контура пересекает ось абсцисс под наклоном – 40 дб./дек., следовательно значение ЛФЧХ в точке пересечения не будет превышать 180 град. Тем не менее постройте ЛФЧЖ внутреннего контура. Внутренний контур устойчив. Проверка расчетов путем моделирования САУ с помощью пакета MatLab
Для проверки правильности проведенных расчетов, выполним математическое моделирование САУ, используя пакет «MatLab» Итак, запускаем пакет «MatLab», щелкаем ярлык «Simulink», в меню «File» выбираем «New». На наборном поле расставляем в прямой цепи входную точку, сумматор для ввода главной единичной отрицательной обратной связи, коэффициент добротности, последовательное корректирующее устройство, звенья, образующие неизменяемую часть САУ, выходную точку. Входной сигнал для местной обратной связи выбираем со входа интегратора, поэтому он пропорционален скорости выходного сигнала. Для получения сигнала ускорения вводим дифференциатор. Так как нельзя реализовать чистое дифференцирование, то в знаменатель включаем бином с постоянной времени меньшей в 10 раз, чем минимальная постоянная времени в моделируемой системе. В нашем случае это 0.0001 сек. Численное дифференцирование использовать при линейном анализе системы нельзя, система станет нелинейной, но можно использовать дифференцирование при моделировании. (Когда есть источник сигнала и осциллограф Scope) Заметим, что при вставке элементов местной обратной связи, необходимо инвертировать направление сигналов в блоках. Для этого необходимо выделить блок и нажать Ctrl_R, блок повернется на 90 градусов. Входная и выходная точки берутся из раздела «Control System Toolbox», передаточные функции – из раздела «Simulink»/ «Continuous», сумматоры и коэффициенты усиления– из раздела «Simulink»/ «Math Opepations». Сформированная таким образом модель САУ приводится на (рисунок 11).
Рисунок 11 - Сформированая схема САУ в пакете MatLab В окне модели выбираем раздел «Tools» / «Linear Analysis...», появится окно «LTI Viewer:имя». В разделе «Edit» / «Configuration...» выбираем количество графиков в окне и их содержание: импульс, шаг, диаграмма Боде (ЛАЧХ) и т.д. Затем из раздела «Simulink» / «Get Linearized Model» запускаем выбранные процессы. Щелкнув правой клавишей по графику, можно установить или убрать сетку, изменить цвета и т.д.
Рисунок 12 - ЛАЧХ и ЛФЧХ скорректированной САУ, полученные с помощью пакета MatLab
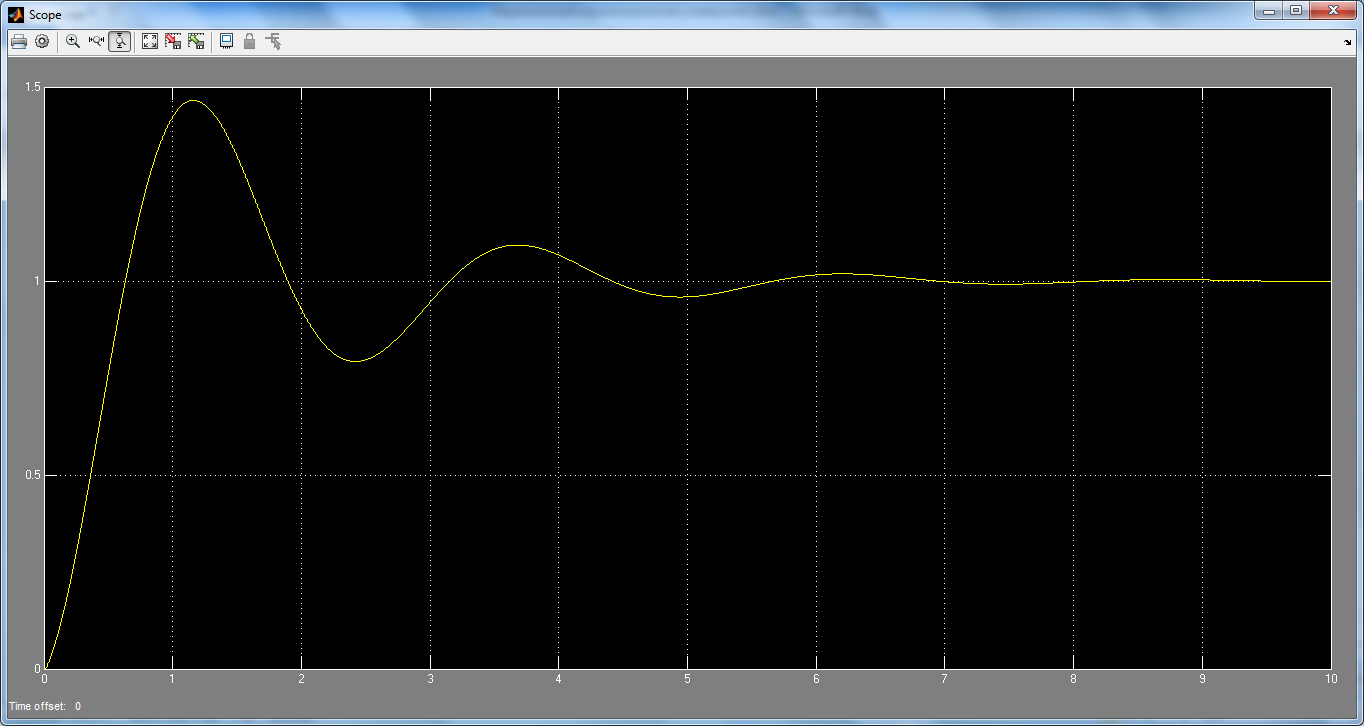
Рисунок 13 - Переходный процесс в скорректированной системе 8. Анализ результатов выполнения домашнего задания
Сравнение ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ на (рисунок 7) и расчетных графиков на (рисунок 3) показывает качественное и значительное численное их совпадение. Так при численном моделировании частота среза А на частотах после 100 Анализ графика переходного процесса показывает, что он удовлетворяет техническим требованиям. Величина перерегулирования Самостоятельное исследование модели САУ
Оценим влияние параметров неизменяемой части САУ на ее логарифмические частотные характеристики и вид переходного процесса. а) Оценим влияние коэффициента колебательности Колебательность (рисунок 13) возникла из-за того, что коэффициент колебательности ниже 0,707, появляется «горб» который раскачивает нашу систему, это несколько ухудшает её качества(добавляет инерционность).Но значение не критическое, так что в целом это удовлетворяет нашу систему. б) Оценим влияние постоянных времени Постоянная времени У постоянной времени Постоянная времени Оценим влияние параметров корректирующих устройств САУ на ее логарифмические частотные характеристики и вид переходного процесса. в) Изменим значения постоянных времени последовательного корректирующего устройства П(s); Увеличим и уменьшим значение постоянных времени последовательного корректирующего устройства П(s) в 10 раз. При увеличение значений низкочастотная часть опускается ниже оси х (зелёная линия на рисунке 14), при уменьшение подымается над осью(красная линия на рисунке 14), но можно сделать вывод, что в независимости от увеличения или уменьшения запас по фазе значительно меньше. Так что следует выбирать значение постоянных времени как можно точнее. Данный вывод сделан исходя из (рисунка 14).
Рисунок 14 - ЛАЧХ и ЛФЧХ скорректированной системы с изменёнными значениями постоянных времени звена П(s) Где зелёная линия увеличения в 10 раз, красная-уменьшенная. г) Оценим влияние общего коэффициента усиления (добротности) системы При увеличение коэффициента усиления(добротности) системы стаёт более инерционной и при достижение предела в 1000 система теряет устойчивость. При уменьшение коэффициента усиления(добротности) время переходного процесса возрастает, это плохое качество для системы.Вывод сделан исходя из (рисунков 15 и 16).
Рисунок 15 – Переходный процесс в скорректированной системе с высоким значение коэф.добротности
Рисунок 16 - Переходный процесс в скорректированной системе с низким значение коэф.добротности д) Изменим значения постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s) При изменение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s),не важно в какую сторону, система становилась неустойчивой, после определенного промежутка времени.
Рисунок 17 - Переходный процесс в скорректированной системе с низким значение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s)
Рисунок 18 - Переходный процесс в скорректированной системе с высоком значение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s) Библиографический список: 1. Компания MathWorks [Электронный ресурс]: MathWorks,сайт. – Режим доступа – www.matlab.ru. – Дата доступа 14.11.2014. – Загл. с экрана. 2. Компания Google Inc [Электронный видео ресурс]: YouTube,сайт. – Режим доступа – https://www.youtube.com/watch?v=_gDsghQ-Y1s&list=PLmu_y3-DV2_k0FqQSqWVKE0cW-eSPUSTq– Дата доступа 02.11.2014. – Загл. с экрана. 3. Бесерский В.А.,Попов Е.П. Теория систем автоматического регулирования.-М.:Наука,1975 4. Компания Академик [Электронный видео ресурс]: Академик,сайт. – Режим доступа – http://dic.academic.ru/dic.nsf/enc_medicine/1333/%D0%90%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%BE%D0%B5– Дата доступа 12.11.2014. – Загл. с экрана. 5. Указание к выполнению домашних заданий по курсу УТС для групп 229,229-а
|
||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 875; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.013 с.) |

 (14)
(14)
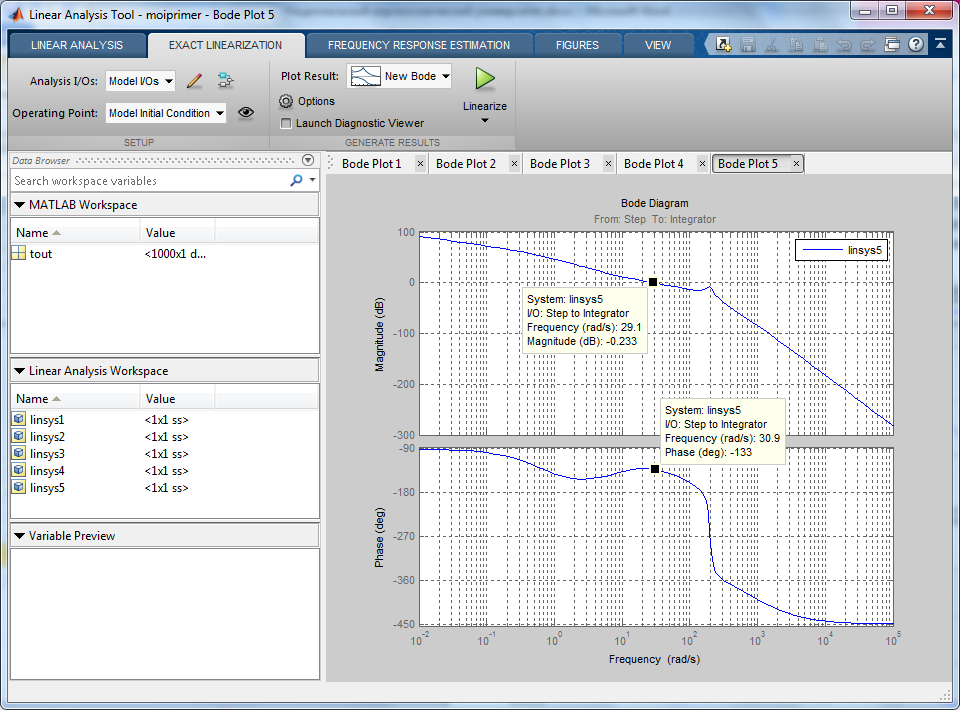

 близка к расчетной: 30
близка к расчетной: 30  . Запас устойчивости по фазе совпадает с расчетным: 40-50 град. Запас устойчивости по амплитуде близок к расчетному: 10-20 дб.
. Запас устойчивости по фазе совпадает с расчетным: 40-50 град. Запас устойчивости по амплитуде близок к расчетному: 10-20 дб. . имеется резонансный пик, который не был учтен при расчете, однако он оказывает значительное влияние на качество процессов в системе. При изменении соотношений между коэффициентами усиления он может подняться над осью абсцисс, что приведет к ухудшению качества переходного процесса и, даже, неустойчивости всей САУ.
. имеется резонансный пик, который не был учтен при расчете, однако он оказывает значительное влияние на качество процессов в системе. При изменении соотношений между коэффициентами усиления он может подняться над осью абсцисс, что приведет к ухудшению качества переходного процесса и, даже, неустойчивости всей САУ. , а длительность переходного процесса 0.4 сек. меньше заданных 0.6 сек.
, а длительность переходного процесса 0.4 сек. меньше заданных 0.6 сек. :
: ,
,  ,
,  :
: