Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кафедри “Теоретичної механіки , машинознавства і робото механічних” системСодержание книги
Поиск на нашем сайте Кафедри “Теоретичної механіки, машинознавства і робото механічних” систем
КУРСОВИЙ ПРОЕКТ з «Теорії технічних систем” на тему: «Синтез послідовних та паралельних коригуючих пристроїв лінійних САУ»
Студента 2 курсу 229-а групи напряму підготовки “Прикладна механіка” Шарошкіна Р.Д. Керівник ___________________________ ____________________________________ (посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна шкала ________________ Кількість балів: __________Оцінка: ECTS _____
Члени комісії ________________ ___________________________ (підпис) (прізвище та ініціали) ________________ ___________________________ (підпис) (прізвище та ініціали) ________________ ___________________________ (підпис) (прізвище та ініціали
м. Харків 2014рік Оглавление Оглавление. 2 Задание. 3 Ведение. 5 1. Предварительный анализ САУ, добротность системы.. 8 1-ый этап: 8 2-ой этап: 10 2. Синтез последовательных и параллельных корректирующих устройств линейных САУ. 12 4.1 Построение рабочей точки Ар. 13 4.2 Построение 1-й низкочастотной асимптоты.. 13 4.3 Нахождение частоты среза 4.4 Построение среднечастотной асимптоты.. 14 4.5 Построение ЛАЧХ неизменяемой части САУ Lm|Wн(jω)|. 14 4.6 Построение желаемой ЛАЧХ. 15 3. Расчет параметров корректирующих устройств. 16 4. Сопряжение желаемой ЛАЧХ с ЛАЧХ неизменяемой части САУ. 18 5. Определение запасов устойчивости по фазе и амплитуде синтезированной системы.. 19 6. Проверка устойчивости внутреннего контура. 19 7. Проверка расчетов путем моделирования САУ с помощью пакета MatLab. 20 8. Анализ результатов выполнения домашнего задания. 23 Библиографический список: 24
Задание
Задание состоит из двух этапов, а каждый этап состоит из двух частей. На первом этапе строятся ЛАЧХ и ЛФЧХ неизменяемой части САУ. Вначале вручную строятся приближенные асимптотические характеристики, затем с помощью пакета «MatLab» строятся точные характеристики, проводится их сравнение, определяются частоты, на которых ЛАЧХ и ЛЧФХ совпадают в наибольшей степени и частоты с наибольшими различиями. Таблица 1- Исходные данные для 1-ой части 1-го этапа
Таблица 2 - Исходные данные для 2-ой части 1-го этапа
На втором этапе строятся «желаемые» ЛАЧХ и ЛФЧХ САУ, т.е. характеристики при которых САУ работает заведомо устойчиво с хорошими показателями качества. Также вначале строятся приближенные асимптотические характеристики, а затем с помощью пакета «MatLab» строятся точные характеристики той же САУ. Проводится анализ сходства и различий этих характеристик.
Таблица 3 - Исходные данные для 1-ой части 2-го этапа
Таблица 4 - Исходные данные для 2-ой части 2-го этапа
Ведение
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса. История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.
Рисунок 1 - Обобщенная структурная схема САР В нашем случаи в состав САУ входят следующие основные элементы: неизменяемая часть (силовой усилитель, двигатель, редуктор, элементы исполнительной системы), корректирующие устройства (последовательные и параллельные), главная отрицательная обратная связь и устройство сравнения. Неизменяемая часть САУ выбирается при энергетическом расчете. Она должна обеспечивать заданную скорость и ускорение нагрузки заданной массы: слабый двигатель не сможет перемещать массивную нагрузку с заданной скоростью, обеспечивать необходимое ускорение. Слабый усилитель не сможет управлять мощным двигателем и т.д. Предварительный анализ САУ, добротность системы
1-ый этап: Неизменяемая часть САУ:
В этой формуле (1) выражение Построение ЛАЧХ и ЛФЧХ ручным и машинным способом: Ѡ1=1/ T1=8.34 с. -1, Ѡ2=1/ T2=222.3 с. -1, Ѡ3=1/ T3=58.82 с. 1. Графики построение ЛАЧХ и ЛФЧХ ручным и машинным способом приведены ниже.
2-ой этап: На втором этапе строим и анализируем «желаемые» ЛАЧХ и ЛФЧХ. Параметры
При построениях принимаем значение общего коэффициента усиления (добротности) μ = 1. В дальнейшем, при синтезе корректирующих устройств, этот коэффициент будет определен графо-аналитическим способом. Вообще говоря, значение общего коэффициента усиления μ выбрано более корректно. При графическом построении ЛАЧХ необходимо выбрать μ такой величины, чтобы ось асимптот разрезала первую среднечастотную асимптоту «желаемой» ЛАЧХ ( Ѡ10=1/ T10=1.23 с. -1, Ѡ20=1/ T20=3.7 с. -1, Ѡ30=1/ T30=38,5 с. -1, Ѡ3=1/ T3=77 с. 1, Ѡ2=1/ T2=222.3 с. -1. Используя графо-аналитический способ получим, что коэффициента усиления равен: 20*lg μ=30 из которой μ=31; Используя это коэффициент, проверим наши расчёты в пакете Matlab.
Рисунок 5 - Схема САУ в пакете MATLAB
Рисунок 6 – Ручной способ построение желаемой ЛАЧХ и ЛФЧХ
Рисунок 7 – Машинный способ построение желаемой ЛАЧХ и ЛФЧХ Также можно сделать вывод, что запас по фазе равен 40 град. Построение рабочей точки Ар
Вычислим координаты рабочей точки
Из формулы (4) получим:
Подставляя числовые значения в формулу (5), получим: ωр.э.=1.33 с.-1 ар.э.=22,5град 20*lg(22.5/0.3)=37.5дб Координаты рабочей точки Ар(1,33сек-1;37,5дб). Наносим рабочую точку на ЛАЧХ (рисунок 3). 4.1. 4.2. 4.3. 4.4. 4.5. Построение желаемой ЛАЧХ
Формирование желаемой ЛАЧХ является итеративным, творческим процессом, основанным на знании и опыте проектировщика. Выше и правее рабочей точки Ар проводим сопрягающую асимптоту AB под наклоном -40 дб/дек. Она сопрягается со среднечастотной асимптотой на частоте 1/T1*=0.9сек-1. Отсюда T1*=0.11сек. Если поднять ЛАЧХ неизменяемой части OAFHI до рабочей точки Ар, то видно, что получаемая система либо неустойчива, либо очень плохого качества, т.к. точка сопряжения желаемой ЛАЧХ с ЛАЧХ неизменяемой части САУ очень близка к частоте среза Дополним среднечастотную часть желаемой ЛАЧХ второй асимптотой CD с сопрягающей частотой 1/T2*=70 сек-1 с тем, чтобы асимптота в точке сопряжения Cимела длину 5-10 дб. Постоянная времени T2*=0.014сек Пристыкуем первую высокочастотную асимптоту DE к желаемой ЛАЧХ под наклоном -80 дб/дек. Вторая высокочастотная асимптота в точке Dсопрягается с первой на частоте
Самостоятельное исследование модели САУ
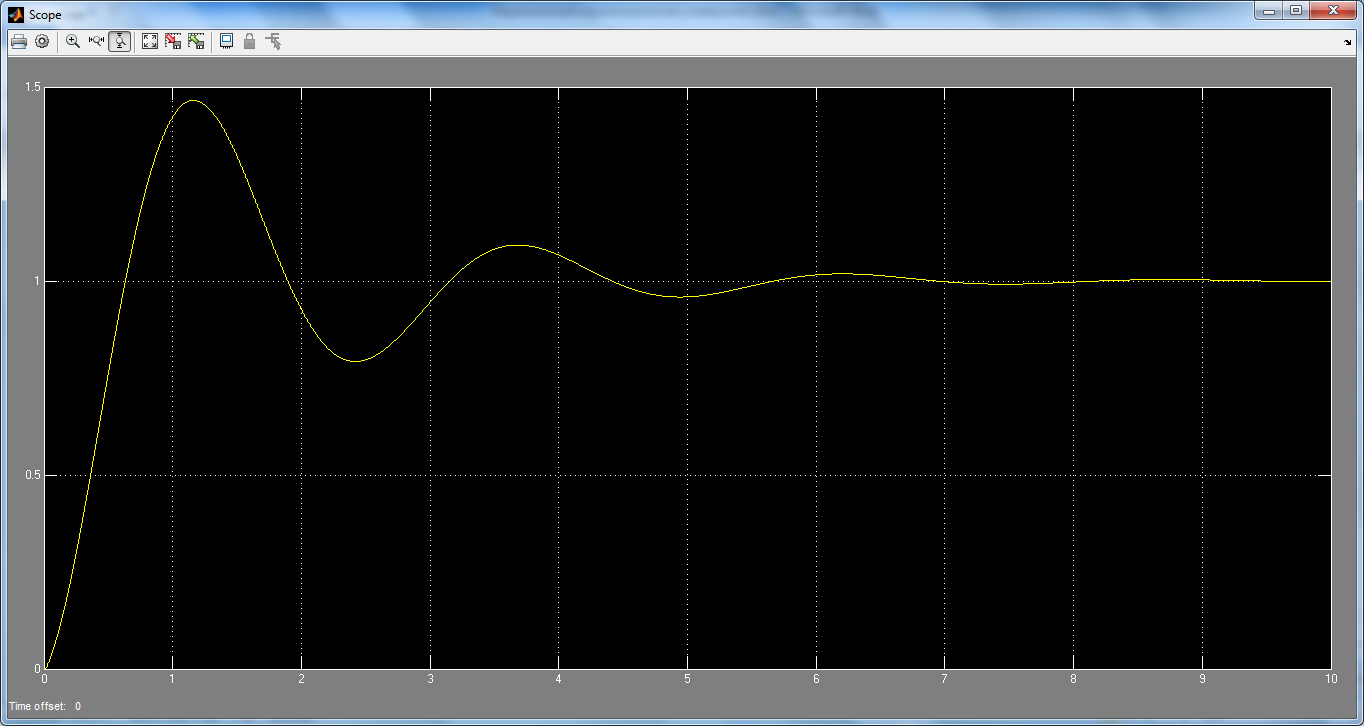
Оценим влияние параметров неизменяемой части САУ на ее логарифмические частотные характеристики и вид переходного процесса. а) Оценим влияние коэффициента колебательности Колебательность (рисунок 13) возникла из-за того, что коэффициент колебательности ниже 0,707, появляется «горб» который раскачивает нашу систему, это несколько ухудшает её качества(добавляет инерционность).Но значение не критическое, так что в целом это удовлетворяет нашу систему. б) Оценим влияние постоянных времени Постоянная времени У постоянной времени Постоянная времени Оценим влияние параметров корректирующих устройств САУ на ее логарифмические частотные характеристики и вид переходного процесса. в) Изменим значения постоянных времени последовательного корректирующего устройства П(s); Увеличим и уменьшим значение постоянных времени последовательного корректирующего устройства П(s) в 10 раз. При увеличение значений низкочастотная часть опускается ниже оси х (зелёная линия на рисунке 14), при уменьшение подымается над осью(красная линия на рисунке 14), но можно сделать вывод, что в независимости от увеличения или уменьшения запас по фазе значительно меньше. Так что следует выбирать значение постоянных времени как можно точнее. Данный вывод сделан исходя из (рисунка 14).
Рисунок 14 - ЛАЧХ и ЛФЧХ скорректированной системы с изменёнными значениями постоянных времени звена П(s) Где зелёная линия увеличения в 10 раз, красная-уменьшенная. г) Оценим влияние общего коэффициента усиления (добротности) системы При увеличение коэффициента усиления(добротности) системы стаёт более инерционной и при достижение предела в 1000 система теряет устойчивость. При уменьшение коэффициента усиления(добротности) время переходного процесса возрастает, это плохое качество для системы.Вывод сделан исходя из (рисунков 15 и 16).
Рисунок 15 – Переходный процесс в скорректированной системе с высоким значение коэф.добротности
Рисунок 16 - Переходный процесс в скорректированной системе с низким значение коэф.добротности д) Изменим значения постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s) При изменение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s),не важно в какую сторону, система становилась неустойчивой, после определенного промежутка времени.
Рисунок 17 - Переходный процесс в скорректированной системе с низким значение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s)
Рисунок 18 - Переходный процесс в скорректированной системе с высоком значение постоянных времени и коэффициенты усиления по скорости и ускорению в параллельном корректирующем устройстве Z(s) Библиографический список: 1. Компания MathWorks [Электронный ресурс]: MathWorks,сайт. – Режим доступа – www.matlab.ru. – Дата доступа 14.11.2014. – Загл. с экрана. 2. Компания Google Inc [Электронный видео ресурс]: YouTube,сайт. – Режим доступа – https://www.youtube.com/watch?v=_gDsghQ-Y1s&list=PLmu_y3-DV2_k0FqQSqWVKE0cW-eSPUSTq– Дата доступа 02.11.2014. – Загл. с экрана. 3. Бесерский В.А.,Попов Е.П. Теория систем автоматического регулирования.-М.:Наука,1975 4. Компания Академик [Электронный видео ресурс]: Академик,сайт. – Режим доступа – http://dic.academic.ru/dic.nsf/enc_medicine/1333/%D0%90%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%BE%D0%B5– Дата доступа 12.11.2014. – Загл. с экрана. 5. Указание к выполнению домашних заданий по курсу УТС для групп 229,229-а Кафедри “Теоретичної механіки, машинознавства і робото механічних” систем
КУРСОВИЙ ПРОЕКТ з «Теорії технічних систем” на тему: «Синтез послідовних та паралельних коригуючих пристроїв лінійних САУ»
Студента 2 курсу 229-а групи напряму підготовки “Прикладна механіка” Шарошкіна Р.Д. Керівник ___________________________ ____________________________________ (посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна шкала ________________ Кількість балів: __________Оцінка: ECTS _____
Члени комісії ________________ ___________________________ (підпис) (прізвище та ініціали) ________________ ___________________________ (підпис) (прізвище та ініціали) ________________ ___________________________ (підпис) (прізвище та ініціали
м. Харків 2014рік Оглавление Оглавление. 2 Задание. 3 Ведение. 5 1. Предварительный анализ САУ, добротность системы.. 8 1-ый этап: 8 2-ой этап: 10 2. Синтез последовательных и параллельных корректирующих устройств линейных САУ. 12 4.1 Построение рабочей точки Ар. 13 4.2 Построение 1-й низкочастотной асимптоты.. 13 4.3 Нахождение частоты среза 4.4 Построение среднечастотной асимптоты.. 14 4.5 Построение ЛАЧХ неизменяемой части САУ Lm|Wн(jω)|. 14 4.6 Построение желаемой ЛАЧХ. 15 3. Расчет параметров корректирующих устройств. 16 4. Сопряжение желаемой ЛАЧХ с ЛАЧХ неизменяемой части САУ. 18 5. Определение запасов устойчивости по фазе и амплитуде синтезированной системы.. 19 6. Проверка устойчивости внутреннего контура. 19 7. Проверка расчетов путем моделирования САУ с помощью пакета MatLab. 20 8. Анализ результатов выполнения домашнего задания. 23 Библиографический список: 24
Задание
Задание состоит из двух этапов, а каждый этап состоит из двух частей. На первом этапе строятся ЛАЧХ и ЛФЧХ неизменяемой части САУ. Вначале вручную строятся приближенные асимптотические характеристики, затем с помощью пакета «MatLab» строятся точные характеристики, проводится их сравнение, определяются частоты, на которых ЛАЧХ и ЛЧФХ совпадают в наибольшей степени и частоты с наибольшими различиями. Таблица 1- Исходные данные для 1-ой части 1-го этапа
Таблица 2 - Исходные данные для 2-ой части 1-го этапа
На втором этапе строятся «желаемые» ЛАЧХ и ЛФЧХ САУ, т.е. характеристики при которых САУ работает заведомо устойчиво с хорошими показателями качества. Также вначале строятся приближенные асимптотические характеристики, а затем с помощью пакета «MatLab» строятся точные характеристики той же САУ. Проводится анализ сходства и различий этих характеристик.
Таблица 3 - Исходные данные для 1-ой части 2-го этапа
Таблица 4 - Исходные данные для 2-ой части 2-го этапа
Ведение
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса. История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.
Рисунок 1 - Обобщенная структурная схема САР В нашем случаи в состав САУ входят следующие основные элементы: неизменяемая часть (силовой усилитель, двигатель, редуктор, элементы исполнительной системы), корректирующие устройства (последовательные и параллельные), главная отрицательная обратная связь и устройство сравнения. Неизменяемая часть САУ выбирается при энергетическом расчете. Она должна обеспечивать заданную скорость и ускорение нагрузки заданной массы: слабый двигатель не сможет перемещать массивную нагрузку с заданной скоростью, обеспечивать необходимое ускорение. Слабый усилитель не сможет управлять мощным двигателем и т.д. Предварительный анализ САУ, добротность системы
1-ый этап: Неизменяемая часть САУ:
В этой формуле (1) выражение Построение ЛАЧХ и ЛФЧХ ручным и машинным способом: Ѡ1=1/ T1=8.34 с. -1, Ѡ2=1/ T2=222.3 с. -1, Ѡ3=1/ T3=58.82 с. 1. Графики построение ЛАЧХ и ЛФЧХ ручным и машинным способом приведены ниже.
2-ой этап: На втором этапе строим и анализируем «желаемые» ЛАЧХ и ЛФЧХ. Параметры
При построениях принимаем значение общего коэффициента усиления (добротности) μ = 1. В дальнейшем, при синтезе корректирующих устройств, этот коэффициент будет определен графо-аналитическим способом. Вообще говоря, значение общего коэффициента усиления μ выбрано более корректно. При графическом построении ЛАЧХ необходимо выбрать μ такой величины, чтобы ось асимптот разрезала первую среднечастотную асимптоту «желаемой» ЛАЧХ ( Ѡ10=1/ T10=1.23 с. -1, Ѡ20=1/ T20=3.7 с. -1, Ѡ30=1/ T30=38,5 с. -1, Ѡ3=1/ T3=77 с. 1, Ѡ2=1/ T2=222.3 с. -1. Используя графо-аналитический способ получим, что коэффициента усиления равен: 20*lg μ=30 из которой μ=31; Используя это коэффициент, проверим наши расчёты в пакете Matlab.
Рисунок 5 - Схема САУ в пакете MATLAB
Рисунок 6 – Ручной способ построение желаемой ЛАЧХ и ЛФЧХ
Рисунок 7 – Машинный способ построение желаемой ЛАЧХ и ЛФЧХ Также можно сделать вывод, что запас по фазе равен 40 град.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 496; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.012 с.) |

 ...... 13
...... 13 , с.
, с.
 , с.
, с.
 , с.
, с.

 , с.
, с.
 , с.
, с.
 , с.
, с.
 град/с
град/с
 град/с2
град/с2
 град.
град.
 с.
с.
 %
%

 (1)
(1) имитирует знаменатель упрощенной модели двигателя постоянного тока с независимым возбуждением. Выражение
имитирует знаменатель упрощенной модели двигателя постоянного тока с независимым возбуждением. Выражение  имитирует знаменатель силового усилителя, последний трехчлен имитирует упругий редуктор, передаточные элементы и нагрузку. Все выражения до предела упрощены и весьма условны. При построениях принимаем значение общего коэффициента усиления (добротности) μ = 1. В дальнейшем, при синтезе корректирующих устройств, этот коэффициент будет определен графо-аналитическим способом
имитирует знаменатель силового усилителя, последний трехчлен имитирует упругий редуктор, передаточные элементы и нагрузку. Все выражения до предела упрощены и весьма условны. При построениях принимаем значение общего коэффициента усиления (добротности) μ = 1. В дальнейшем, при синтезе корректирующих устройств, этот коэффициент будет определен графо-аналитическим способом Рисунок 2 - Схема САУ в пакете MATLAB
Рисунок 2 - Схема САУ в пакете MATLAB Рисунок 3 – Ручной способ построение ЛАЧХ и ЛФЧХ неизменяемой части САУ
Рисунок 3 – Ручной способ построение ЛАЧХ и ЛФЧХ неизменяемой части САУ Рисунок 4 - Машинный способ построения ЛАЧХ и ЛФЧХ неизменяемой части САУ
Рисунок 4 - Машинный способ построения ЛАЧХ и ЛФЧХ неизменяемой части САУ совпадают с аналогичными параметрами неизменяемой части САУ первого этапа. Элементы передаточной функции с параметрами, индексы которых кратны десяти, реализуются с помощью дополнительных – корректирующих элементов, значение и расчет которых будет рассматриваться в последующих частях курса.
совпадают с аналогичными параметрами неизменяемой части САУ первого этапа. Элементы передаточной функции с параметрами, индексы которых кратны десяти, реализуются с помощью дополнительных – корректирующих элементов, значение и расчет которых будет рассматриваться в последующих частях курса. (2)
(2) ,
,  ) примерно на две равные части.
) примерно на две равные части.


 (3)
(3) (4)
(4) (5)
(5) . Не обеспечивается достаточная протяженность среднечастотной асимптоты BC с наклоном -20 дб/дек. после пересечения ею оси абсцисс. Кроме того в формируемой ЛАЧХ, среднечастотная асимптота BCQс наклоном -20 дб/дек. переходит в высокочастотную асимптоту с наклоном -80 дб/дек. Это приведет к резонансному всплеску в точке Qи ухудшит качество переходного процесса.
. Не обеспечивается достаточная протяженность среднечастотной асимптоты BC с наклоном -20 дб/дек. после пересечения ею оси абсцисс. Кроме того в формируемой ЛАЧХ, среднечастотная асимптота BCQс наклоном -20 дб/дек. переходит в высокочастотную асимптоту с наклоном -80 дб/дек. Это приведет к резонансному всплеску в точке Qи ухудшит качество переходного процесса. и идет с наклоном -100 дб/дек. Высокочастотная часть желаемой ЛАЧХ формируется за счет ЛАЧХ неизменяемой части САУ, поэтому полностью повторяет ее конфигурацию.
и идет с наклоном -100 дб/дек. Высокочастотная часть желаемой ЛАЧХ формируется за счет ЛАЧХ неизменяемой части САУ, поэтому полностью повторяет ее конфигурацию. :
: