Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематика зубчатых механизмовСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
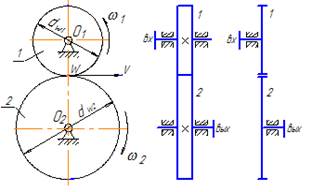
1) Одна пара зубчатых колес (рисунок 35)
По основному закону зацепления
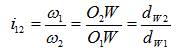
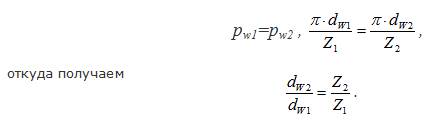
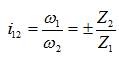
При пересопряжении зубьев следующий зуб второго колеса должен попасть в следующую впадину первого, т.е. шаги на начальных окружностях находящихся в зацеплении колес должны быть одинаковыми: Таким образом, для одной пары колес передаточное отношение прямо пропорционально отношению угловых скоростей и обратно пропорционально отношению чисел зубьев колес, составляющих пару:
Знак передаточного отношения показывает направление вращения колеса на выходе по отношению к направлению вращения на входе: (+) – направления вращения на входе и на выходе совпадают. Для пары колес направление вращения совпадает при внутреннем зацеплении (рисунок 35б); (–) – колеса вращаются в противоположные стороны. Это происходит при внешнем зацеплении (рисунок 35а). На рисунке 35 дана фронтальная проекция передач, а также их условное изображение на кинематических схемах при виде сбоку (или в разрезе). 2) Многоступенчатая передача Для увеличения кинематического эффекта несколько зубчатых пар могут последовательно соединяться в единый механизм. Такой механизм называется многоступенчатым зубчатым механизмом или многоступенчатой передачей. Схема одного из таких механизмов приведена на рисунке 36.
Запишем передаточные отношения для каждой пары колес данного механизма:
Из схемы видно, что колеса 2 и 3 находятся на одном валу и вращаются с одной угловой скоростью (ω2 = ω 3), аналогично ω4 = ω5. Поэтому в приведенном выше уравнении эти члены сократились. Таким образом, общее передаточное отношение многоступенчатого механизма равно произведению частных передаточных отношений ступеней, из которых состоит данный механизм: В этой формуле “m” – число передач внешнего зацепления (если число передач внешнего зацепления четное, то знак "+", т.е. колеса на входе и на выходе вращаются в одну сторону; если нечетное, то знак "–". Количество передач внутреннего зацепления не учитывается, т.к. внутреннее зацепление не изменяет направление вращения). В приведенном примере m=2 (пары Z1* Z2 и Z3* Z4; пара Z5* Z6 – пара внутреннего зацепления) и, таким образом, колеса "1" и "6" вращаются в одну сторону.
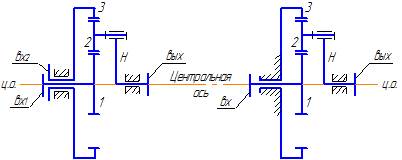
3) Планетарные и дифференциальные механизмы В практике применяются зубчатые механизмы, имеющие колеса с подвижными геометрическими осями (сателлиты). Такие механизмы называются планетарными (если имеют одну степень свободы) или дифференциальными (если степень свободы равна двум). Планетарные и дифференциальные механизмы позволяют получить более высокий кинематический эффект, более высокий кпд, более удобную компоновку. Дифференциальные механизмы позволяют также раскладывать одно движение на два или складывать два движения в одно.
На рисунке 37 приведен пример дифференциального (рисунок 37 а) и планетарного механизмов (рисунок 37 б). В этих механизмах колесо "2" имеет подвижную геометрическую ось – это и есть сателлит. Неподвижная геометрическая ось, вокруг которой движется ось сателлита, называется центральной осью. Колеса, геометрические оси которых совпадают с центральной, также называются центральными (на рисунке 37 колеса "1" и "3" – иногда такие колеса называют солнечными). Звено, соединяющее ось сателлитов с центральной осью, называется водилом (водило обычно обозначается "H").
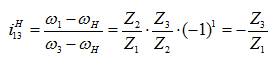
При кинематическом исследовании дифференциальных и планетарных механизмов применяется метод обращения движения (по-другому его называют методом остановки водила). Смысл этого метода заключается в том, что если всем звеньям системы добавить (с любым знаком) одну и ту же скорость, то характер относительного движения этих звеньев не изменится. Рассмотрим решение с помощью этого метода на примере механизмов, изображенных на рисунке 37. Пусть звенья этого механизма имеют соответственно угловые скорости: ω1, ω2, ω3, ωH. Добавим всем этим звеньям угловую скорость (– wH). Тогда они будут иметь следующие скорости: (ω1– ωH), (ω2 – ωH), (ω3 – ωH), (ωH – ωH) = 0. Водило стало неподвижным, значит и ось сателлита 2 также стала неподвижной, т.е. механизм превратился в обычный многоступенчатый механизм с неподвижными осями всех зубчатых колес. Записываем уравнение передаточного отношения между центральными колесами этого многоступенчатого механизма (для того, чтобы отличить передаточное отношение механизма с остановленным водилом от первоначально заданного, в верхнем индексе ставят обозначение водила H. Для данного примера читается – передаточное отношение от первого к третьему при остановленном водиле):
Формулу такого типа, полученную на основе метода обращения движения, называют формулой Виллиса. В данном конкретном механизме (рисунок 38) имеется еще одна особенность – колесо 2 входит последовательно в два зацепления(с первым и третьим колесами), являясь ведомым для первого колеса и ведущим – для второго. В результате в уравнении его число зубьев сократилось, т.е. его число зубьев не влияет на общее передаточное отношения механизма. Такие колеса часто называют «паразитными», хотя правильно их называть ведомо-ведущими. Полученная формула является универсальной для обоих механизмов, изображенных на рисунке 37. Дифференциальный механизм, изображенный на рисунке 37а, имеет две степени свободы, а поэтому для определенности движения надо задать законы движения двум звеньям. При этом возможны следующие варианты: 1) заданы ω1 и ω3; из записанной формулы определяется ωH (вариант, изображенный на рисунке 37 а); 2) заданы ω1 и ωH; из записанной формулы определяется ω3; 3) заданы ωH и ω3; из записанной формулы определяется ω1. Так как звеньям можно задавать любые законы движения, то, как частный случай, одному из центральных колес зададим угловую скорость, равную нулю. Например, в рассматриваемом механизме зададим ω3=0, другим словами, затормозим третье колесо. Таким приемом отнимается одна из двух степеней свободы, и механизм из дифференциального превращается в планетарный (рисунок 37 б). Таким образом, планетарный механизм это частный случай дифференциального, когда одно из центральных колес неподвижно (заторможено). Поэтому решаются эти механизмы совершенно одинаково, по одним и тем же уравнениям, только в планетарном механизме для неподвижного колеса в уравнение подставляется значение угловой скорости, равное нулю. Для изображенного на рисунке 37б планетарного механизма:
Здесь приведен конкретный пример решения, но на самом деле на этом примере надо усвоить метод решения, подход к решению такого рода задач, т.к. метод один, но для каждой схемы механизма будут получаться свои уравнения. 4) Сложные механизмы Существуют механизмы, включающие в свой состав различные части (обычные, планетарные, дифференциальные). В этом случае необходимо разделить механизм на части, записать уравнения передаточных отношений для каждой из них, используя соответствующий метод решения. Совместным решением полученных алгебраических уравнений находят общее передаточное отношение механизма. (Пример см. в рекомендациях по выполнению расчетно-графического задания).
Эвольвентное зацепление
Подавляющее большинство зубчатых передач, применяемых в технике, имеет зубчатые колеса с эвольвентным профилем. Эвольвента как кривая для формирования профиля зуба была предложена Л. Эйлером. Она обладает значительными преимуществами перед другими кривыми, применяемыми для этой цели, – удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, нечувствительна к неточностям межосевого расстояния (что облегчает сборку), наиболее проста и технологична в изготовлении, легко стандартизируется (что особенно важно для такого распространенного вида механизмов как зубчатые передачи).
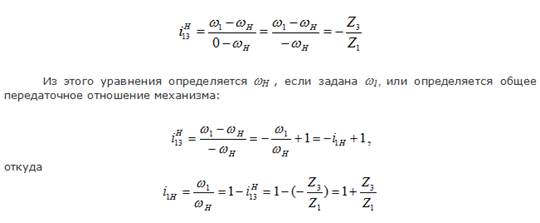
Эвольвента – это траектория движения точки, принадлежащей прямой, перекатывающейся без скольжения по окружности. Данная прямая называется производящей прямой, а окружность, по которой она перекатывается – основной окружностью (рисунок 38 а).
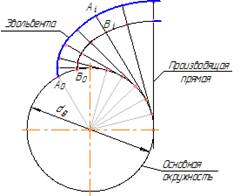
Эвольвента обладает следующими свойствами, которые используются в теории зацепления: 1) форма эвольвенты определяется радиусом основной окружности; 2) нормаль к эвольвенте в любой ее точке является касательной к основной окружности. Точка касания нормали с основной окружностью является центром кривизны эвольвенты в рассматриваемой точке; 3) эвольвенты одной и той же основной окружности являются эквидистантными (равноотстоящими друг от друга) кривыми. Положение любой точки на эвольвенте может быть однозначно охарактеризовано диаметром окружности, на которой она расположена, а также характерными для эвольвенты углами: углом развернутости (обозначается ν), углом профиля (α), эвольвентным углом – invα (рисунок 38 б). На рисунке 38 б показаны эти углы для произвольно выбранной на эвольвенте точки Y, поэтому они имеют соответствующий индекс: - νY – угол развернутости эвольвенты до точки у; - αY – угол профиля в точке Y; - invαY – эвольвентный угол в точке Y (на окружности диаметра dY). То есть индекс показывает, на какой окружности находится рассматриваемая точка эвольвенты, поэтому для характерных окружностей используются индексы, приведенные выше. Например: αa1 – угол профиля эвольвенты в точке, лежащей на окружности вершин первого колеса; invα – эвольвентный угол в точке эвольвенты, находящейся на делительной окружности колеса и т.д. Рассмотрим свойства эвольвенты. Первое свойство имеет строгое математическое доказательство, однако в рамках данного короткого курса оно не приводится. Так как при формировании эвольвенты производящая прямая перекатывается по основной окружности без скольжения, то в данный момент времени она вращается вокруг точки N (N – мгновенный центр скоростей), описывая бесконечно малую дугу окружности, которая и определяет кривизну эвольвенты в данной точке. Т.е. отрезок NY – это радиус кривизны эвольвенты в точке Y (NY= ρY). Но отрезок NY в точности равен дуге NY0 (это та же дуга только вытянутая в прямую линию). Таким образом, имеем:
Чем больше радиус основной окружности, тем больше радиус кривизны эвольвенты в любой ее точке (то есть форма эвольвенты действительно определяется величиной радиуса основной окружности).
Второе свойство также легко просматривается. Так как N – мгновенный центр скоростей, то скорость точки Y перпендикулярна радиусу NY. Но скорость точки, движущейся по криволинейной траектории, направлена по касательной к этой траектории – в данном случае по касательной к эвольвенте в точке Y. Перпендикуляр к касательной – есть нормаль, поэтому прямая YN с одной стороны является нормалью к эвольвенте в точке Y, с другой стороны является касательной к основной окружности (как производящая прямая, перекатывающаяся по основной окружности). То, что точка N является центром кривизны эвольвенты в точке Y, показано при рассмотрении первого свойства. Запишем некоторые зависимости, которые используются в дальнейшем при изучении геометрии эвольвентного зацепления (получаются из рассмотрения рисунка 38 б):
Третье свойство эвольвенты очевидно из рисунка 38а. Действительно, если на производящей прямой взять две точки (А и В), то они будут описывать две совершенно одинаковых эвольвенты, причем, как бы не перемещалась производящая прямая, расстояние между этими точками не изменяется (AiBi = Const). Т.е. действительно это эквидистантные (равноотстоящие друг от друга) кривые. Но, самое важное, что это расстояние AiBi равно расстоянию между этими эвольвентами, измеренному по дуге основной окружности:
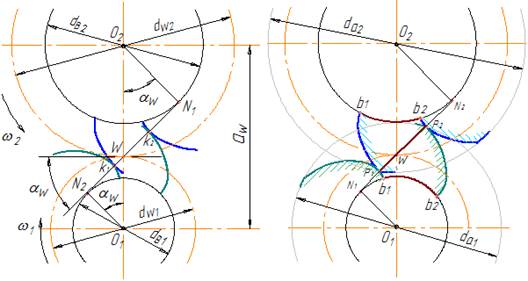
Признаком того, что два криволинейных профиля касаются (а не пересекаются), является наличие у них в точке контакта общей нормали. В связи с этим контакт двух эвольвентных профилей происходит на общей касательной к основным окружностям N1N2 (рисунок 39), которая одновременно будет являться общей нормалью к этим профилям в точке их касания в любой момент времени (на основании второго свойства эвольвенты).
Геометрическое место точек контакта профилей, которое они занимают в процессе работы пары зубьев, называется линией зацепления. Таким образом, в эвольвентной передаче линией зацепления является прямая N1N2 (общая касательная к основным окружностям). На рисунке 39 а показано зацепление двух эвольвентных профилей в разные моменты времени. В обоих положениях прямая N1N2 является общей нормалью к этим касающимся профилям и проходит через полюс зацепления W (мгновенный центр относительного вращения). Это, с одной стороны показывает, что эвольвентные профили удовлетворяют основному закону зацепления, с другой стороны обеспечивают постоянство передаточного отношения, т.к. полюс зацепления не меняет своего положения в процессе работы пары (отношение O2W/O1W остается постянным). С изменением межосевого расстояния будет меняться только положение линии зацепления, но вся картина зацепления останется такой же, т.е. по-прежнему будет сохраняться основной закон зацепления, величина и постоянство передаточного отношения. Это очень важное свойство эвольвентного зацепления, т.к. позволяет вписывать передачу в разные межосевые расстояния, что особенно важно при проектировании коробок скоростей, планетарных и дифференциальных механизмов.
Передача оказывается малочувствительной к неточностям межосевого расстояния, что позволяет снизить требования к точности сборки. Угол между линией зацепления и общей касательной к начальным окружностям в полюсе называется углом зацепления. Угол зацепления, угол профиля на начальной окружности первого колеса и угол профиля на начальной окружности второго колеса равны между собой (αw1= αw2= αw), поэтому все они обозначаются одинаково – αw (без числового индекса – см. рисунок 39 а). Отрезок N1N2 называется теоретической линией зацепления. На этом участке происходит нормальная работа двух неограниченных эвольвент. В реальной передаче эвольвенты ограничены («обрезаны») окружностями вершин, поэтому вся работа пары происходит на участке линии зацепления P1P2, заключенном между окружностями вершин (рисунок 39б). Отрезок P1P2 называется рабочей (активной) частью линии зацепления (иногда называют просто «рабочая линия зацепления», или «активная линия зацепления»). На рисунке 39б показано два положения одной и той же пары: в начале зацепления (зуб ведомого колеса работает своей вершиной, зуб ведущего колеса – нижней рабочей точкой профиля Р1), и в конце зацепления (зуб ведущего колеса работает своей вершиной и в следующий момент выйдет из зацепления, зуб ведомого колеса работает своей нижней рабочей точкой профиля Р2). Примечание: здесь термин «нижняя» или «верхняя» точка относится к положению точек относительно основной окружности, независимо от того, как эти точки располагаются одна относительно другой в пространстве. Из двух рассматриваемых точек профиля «нижней» будет та, которая располагается ближе к основной окружности. При увеличении радиуса основной окружности до бесконечности радиус кривизны эвольвенты в любой ее точке также становится бесконечно большим, т.е. основная окружность и эвольвента превращаются в прямые линии. Эвольвентное зубчатое колесо превращается в зубчатую рейку с прямолинейным профилем зуба. Таким образом, рейка с прямолинейным профилем зуба представляет собой частный случай эвольвентного зубчатого колеса и обладает всеми его свойствами, т.е. может работать с любым эвольвентным колесом (при одном и том же модуле) без нарушения основного закона зацепления. При этом вращательное движение колеса преобразуется в поступательное движение рейки или поступательное движение рейки преобразуется во вращательное движение колеса с соблюдением постоянства передаточного отношения. Т.к. зубчатая рейка с прямолинейным профилем зуба с одной стороны имеет простые формы и легко задать размеры ее элементов, с другой стороны представляет собой эвольвентное зубчатое колесо, то ее параметры положены в основу стандартизации эвольвентных зубчатых колес. Стандартная зубчатая рейка называется исходным контуром (рисунок 40а).
Имеется несколько стандартов на исходные контуры, учитывающие специфику некоторых видов передач (мелкомодульных, конических и т.д.). В основном используются параметры, определенные ГОСТ 13 755 – 81. В соответствии с этим стандартом исходный контур имеет следующие параметры: α = 200 – угол профиля исходного контура (основной параметр, определяющий ряд эвольвент, используемых для зубчатых передач в соответствии с этим стандартом, поэтому часто в конструкторской практике говорят, что у нас в стране используется «двадцатиградусная» эвольвента); ha*= 1 – коэффициент высоты головки зуба; c*= 0,25 – коэффициент радиального зазора (по другим стандартам в зависимости от модуля и типа инструмента с* может быть равен 0,2; 0,3; 0,35); Приведенные коэффициенты являются безразмерными величинами. Абсолютное значение какого-либо размера получается умножением соответствующего коэффициента на модуль (Например: высота головки зуба ha=ha* ⋅ m; величина радиального зазора c = c* ⋅ m и т. д.). Таким образом, форма зуба остается постоянной, а абсолютные размеры определяются модулем (т.е. модуль является как бы коэффициентом пропорциональности). По высоте зуб исходного контура делится на головку и ножку. Это деление осуществляется делительной прямой. Делительная прямая рейки – это прямая, на которой толщина зуба равна ширине впадины (рисунок 40б). Высота ножки зуба несколько больше головки для обеспечения радиального зазора между вершинами зубьев одного колеса и окружностью впадин другого после сборки передачи. Стандартные параметры исходного контура на эвольвентное колесо «переносятся» через делительную окружность (на делительной окружности шаг равен стандартному шагу исходного контура p= π ⋅ m, угол профиля равен углу профиля исходного контура α = 200).
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 1175; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.181.178 (0.012 с.) |