
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематические исследования зубчатых механизмов.Содержание книги
Поиск на нашем сайте В простой зубчатой передаче, состоящей из двух находящихся в зацеплении колес, при внешнем зацеплении колеса вращаются в разные стороны, поэтому передаточное отношение отрицательное, а в передаче с внутренним зацеплением передаточное отношение положительное, т.е. i12 = ω1/ω2 = ±z2/z1, где знак «–» принимают при внешнем зацеплении колес, знак «+» – при внутреннем. Передаточное отношение, которое можно воспроизвести одной парой зубчатых колес (исключая червячную передачу) невелико. При необходимости получения больших передаточных отношений применяют многоступенчатую передачу.
i(n–1)n=(ω1/ω2)∙(ω2/ω3)∙…´(ωn–1/ωn) = ω1/ωn, но ω1/ωn = i1n, поэтому i1n = i12∙i23∙…∙i(n–1)n, (3.22) т.е. передаточное отношение многоступенчатой передачи равно произведению передаточных отношений всех простых зубчатых передач, входящих в механизм. Зависимость можно выразить через числа зубьев колес. Для схемы, представленной на рис. 3.8, а, она примет вид: i1n = (–1)k(z2/z1)∙(z3/z2')∙…∙(zn/z(n–1)'), где z1, z2', …, zn – число зубьев колес передачи; k – число внешних зацеплений.
Винтовые механизмы состоят из винта и гайки и предназначены для преобразования вращательного движения в поступательное и наоборот. Достоинства: Обеспечивают высокую точность поступательных перемещения; Плавность; Получение большого передаточного отношения; Относительная простота изготовления Недостатки: Большие потери на трение во винтовой паре;Низкий КПД, чем меньше шаг, тем выше точность перемещения; Повышенный износ. Механизмы винт – гайка применяют для перемещения магнитных и оптических головок считывания и записи информации в дисководах ПЭВМ; настройки волноводов; фокусировки окуляров и объективов: перемещения кареток и суппортов станков; измерительных и регулировочных устройств; рабочих органов роботов, испытательных машин и т.д. Простейшие винтовые механизмы могут состоять из двух и трех звеньев. Наибольшее распространение получили (рис. 3.11, б) двухзвенный механизм (рис. 3.11, а). Винт 1 вращается и одновременно движется поступательно, гайка 2 неподвижна. КПД винтовых механизмов рассчитывают по формуле h = tgg / tg(g + rт),где g – угол подъема винтовой линии; rт – приведенный угол трения. Наибольшим КПД обладает прямоугольная, а наименьшим – метрическая резьба. Геометрические параметры резьб и допуски на их размеры стандартизированы. Резьбы классифицируют по различным признакам: по форме поверхности, на которую наносится резьба; по форме профиля; по направлению винтовой линии; По назначению резьбы.
Кулачковые механизмы.
Простейший кулачковый механизм (рис. 3.9, а) состоит из кулачка 1, толкателя 2 и 3 стойки. Достоинства: · Возможность получения в зависимости от профиля кулачка различных законов движения ведомого звена · Простота и компактность · Относительно высокий КПД Недостатки: · Сложность изготовления · Большие давления · Повышенный износ · Необходимость в силовом прижатии.
По виду преобразуемых движений кулачковые механизмы можно разделить на следующие группы: механизмы, в которых вращательное движение кулачка 1 преобразуется в возвратно-поступательное или качательное движение толкателя 2; механизмы, в которых возвратно-поступательное движение кулачка 1 преобразуется в возвратно-поступательное или качательное движение толкателя 2; пространственные или коноидные кулачковые механизмы, решающие функции двух переменных. Эти механизмы имеют две степени свободы. Применяются они в передающих устройствах. Толкатели кулачковых механизмов в зависимости от вида кинематического элемента толкателя подразделяются на: точечные, плоские и тарельчатые, с профилем, очерченным по радиусу или сфере, роликовые или шариковые.
|
||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 546; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.008 с.) |

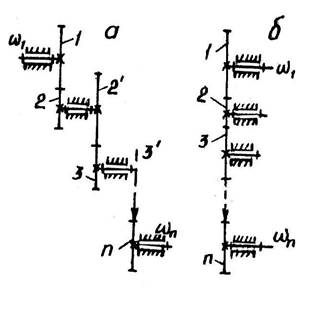 Рассмотрим плоский ступенчатый зубчатый механизм (рис. а), представляющий собой последовательное соединение нескольких простых механизмов. На каждом промежуточном валу находится не менее двух колес, зацепляющихся соответственно с колесами предыдущего и последующего валов. Ведущим является колесо 1, общее передаточное отношение всего механизма i1n = ω1/ωn, где ω1, ωn – соответственно скорости вращения ведущего и выходного n-го звена. Передаточные отношения простых механизмов, состоящих из одной пары колес, находящихся в зацеплении - i12 = ω1/ω2 = –z2/z1; i23 = ω2/ω3 = –z3/z2' и т.д. Перемножим полученные соотношения i12∙i23∙…∙
Рассмотрим плоский ступенчатый зубчатый механизм (рис. а), представляющий собой последовательное соединение нескольких простых механизмов. На каждом промежуточном валу находится не менее двух колес, зацепляющихся соответственно с колесами предыдущего и последующего валов. Ведущим является колесо 1, общее передаточное отношение всего механизма i1n = ω1/ωn, где ω1, ωn – соответственно скорости вращения ведущего и выходного n-го звена. Передаточные отношения простых механизмов, состоящих из одной пары колес, находящихся в зацеплении - i12 = ω1/ω2 = –z2/z1; i23 = ω2/ω3 = –z3/z2' и т.д. Перемножим полученные соотношения i12∙i23∙…∙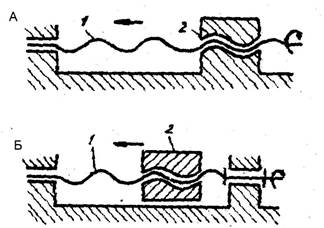 трехзвенные схемы (Ведущий винт 1 образует со стойкой вращательную пару и винтовую пару с гайкой 2, которая движется поступательно по неподвижным направляющим.)
трехзвенные схемы (Ведущий винт 1 образует со стойкой вращательную пару и винтовую пару с гайкой 2, которая движется поступательно по неподвижным направляющим.)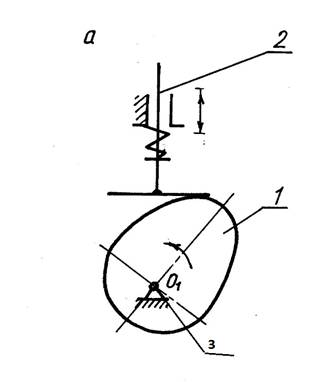 Кулачковые механизмы широко применяются в устройствах управления, прерывистого движения. Состоит из кулачка, толкателя и стойки. В кулачковых механизмах кулачок может совершать вращательное и поступательное движения
Кулачковые механизмы широко применяются в устройствах управления, прерывистого движения. Состоит из кулачка, толкателя и стойки. В кулачковых механизмах кулачок может совершать вращательное и поступательное движения


