Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Источники пространственных данныхСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
В качестве источников пространственных данных выступают аналоговые или цифровые данные, которые служат основой для создания моделей пространственных данных. Существует несколько основных типов источников пространственных данных: 1. Картографические источники, в т.ч. карты, планы, атласы, схемы и другие картографические изображения, нанесенные на бумагу, картон, пленку, пластик или иные носители. Такие данные должны быть вначале переведены в электронный вид с помощью сканирования или цифрового фотографирования. Полученные растровые изображения могут быть непосредственно использованы в качестве слоя карты в ГИС, либо их можно векторизовать - перевести в векторный вид. Кроме современного метода «сканирование-векторизация», ранее широко (сейчас уже достаточно редко) использовался метод цифрования (дигитализации), когда векторные данные непосредственно «скалывались» специальным пером с твердой копии карты, уложенной поверх дигитайзера (цифрового планшета). 2. Данные дистанционного зондирования (ДДЗ), включая аэро- и космоснимки в видимом, инфракрасном, ультрафиолетовом, радиодиапазоне или во многих диапазонах волн сразу; результаты лазерного сканирования поверхности земли, а также другие данные, полученные неконтактным способом. 3. Данные полевых изысканий, полученные с использованием различных геодезических приборов (теодолиты, нивелиры, электронные тахеометры, лазерные сканеры) и приборов глобальной спутниковой навигации (GPS, ГЛОНАСС, Galileo). 4. Данные натурных наблюдений на гидрометеорологических и иных постах и станциях. Как правило, эти данные характеризуют распределение полей некоторых явлений на Земле, таких как температура, осадки, скорость и направление ветра и др. Эти данные обычно передаются в ГИС в виде точечных объектов (с координатами места наблюдения), которым заданы в виде атрибутов измеренные значения. 5. Статистические данные ведомственной и государственной статистики. Такие данные обычно помещаются в ГИС в виде атрибутов пространственных объектов. Как правило, источники пространственных данных не могут быть непосредственно переданы в ГИС для использования. Векторизация Процедура векторизации предназначена для перевода существующих картографических изображений из растрового в векторный вид.
Процедура векторизации разбивается на несколько основных этапов: 1. Геометрическая коррекция снимка. Необходимость этого этапа может возникать, например, из-за небольших погрешностей в работе механики сканера, что приводит к неравномерному движению сканирующей головки по противоположным краям сканируемого листа. В результате прямоугольник на карте может превратиться в трапецию в памяти компьютера. Если ввод данных в компьютер выполнялся с помощью цифрового фотоаппарата, то на этом этапе исправляются оптические искажения, вызванные оптикой объектива фотоаппарата. 2. Привязка к требуемой картографической проекции. На данном этапе определяется использованная в исходном изображении картографическая проекция и на растре отмечается некоторое число характерных точек, координаты которых можно точно установить из каких-то соображений. Такими характерными точками обычно выступают кресты координатной или картографической сетки, и только при их недостаточном количестве - другие точечные объекты. 3. Склейка различных растров в единое полотно для сплошного покрытия территории. Для выполнения склейки на смежных растровых изображениях находятся общие объекты (например, дорога, проходящая через несколько листов карты), координаты которых должны быть совмещены на карте. После этого программа векторизации подбирает оптимальное преобразование (обычно кусочно-линейное или кусочно-квадратичное), позволяющее достичь заданных требований с минимальными искажениями растра. По окончании первых трех этапов растр обычно преобразуется в новый, в котором исправлены все геометрические и проекционные искажения, а также данный растр увязан с другими, смежными. 4. Подготовка к векторизации. На данном этапе обычно последовательно выполняется корректировка яркости и контраста (ручным или гистограммным способом), удаление различных шумов (удаление очень мелких пятен, устранение маленьких разрывов линий и др.). Кроме того, в связи с тем, что для печати карт обычно применяется небольшое количество различных цветов, каждый из которых используется для обозначения различного рода пространственных сущностей, на данном этапе растр может быть разделен по цветам на несколько отдельных растров. Например, на картах железные дороги могут быть отмечены черным цветом, красным цветом - автомобильные дороги государственного значения, а синим - автомобильные дороги местного значения. Поэтому для векторизации транспортных сетей имеет смысл разделить по цветам исходный растр на 3 разных.
5. Собственно векторизация. Существует 3 способа векторизации: ручной, полуавтоматический и автоматический. При ручном способе пользователь самостоятельно отмечает координаты фигур пространственных объектов поверх растра с помощью компьютерной мыши. При полуавтоматическом способе пользователь отмечает объект, который предстоит векторизовать, а система предлагает векторный вариант (линию или полигон), который может быть принят пользователем, отвергнут или модифицирован. В автоматическом режиме программа анализирует сразу весь растр и выделяет все имеющиеся объекты. Главным недостатком автоматического режима является невысокая точность распознавания. Это связано как непосредственно с математическими и алгоритмическими проблемами решения задачи распознавания, так и с проблемой каскадных ошибок, когда один неверно распознанный объект может повлиять на распознавание следующего объекта. Поэтому после автоматического распознавания оператор вынужден визуально полностью проверять полученные результаты и вносить коррективы. В итоге общее время такой работы может превзойти время полуавтоматической векторизации. Именно поэтому на практике наибольшее распространение получили программы полуавтоматической векторизации, позволяющие гибко управлять процессом перевода растра в векторный вид. Дистанционное зондирование Данные дистанционного зондирования (ДДЗ), включая аэро- и космоснимки в видимом, инфракрасном, ультрафиолетовом, радиодиапазоне или во многих диапазонах волн сразу; результаты лазерного сканирования поверхности Земли, а также другие данные, полученные неконтактным способом. Раньше ДДЗ получали с помощью фотокамер, которыми делали снимки с самолетов или спутников. Фотопленка из камер затем доставлялась на Землю, где проявлялась и переводилась в цифровой вид. В настоящее время наибольший объем ДДЗ поступает от оптических или радиосенсоров, установленных на искусственных спутниках Земли или на самолетах. Кроме того, в ряде случаев используются вертолеты, дирижабли и различные беспилотные летательные аппараты (радиоуправляемые вертолеты и самолеты). Сенсоры, установленные на спутниках и пригодные для картографических работ, имеют относительно невысокую разрешающую способность. Самые лучшие из них имеют точность 2 м, 1 м и даже 0,4 м в оптическом диапазоне. Аппараты, работающие во многих диапазонах одновременно, обычно дают меньшее разрешение (5, 10, 50, 100 м), в особенности в радиодиапазонах. Кроме того, разрешение по вертикали и горизонтали иногда бывает разным. На рис. 3.32 показан пример космического снимка большой территории с низким разрешением. Снимок выполнялся с помощью российского спутника Ресурс-01 № 3. На рис. 3.33 приведён космический снимок высокого разрешения, выполненный в целях создания карты г. Томска масштаба 1:5000. Стоит также отметить, что на спутниках работают сенсоры и гораздо более высокого разрешения чем 0,4, однако они имеют узкую полосу фотографирования, не обеспечивающую взаимного перекрытия снимков, и ряд других недостатков. В настоящее время такие сенсоры используются в основном только в разведывательных целях.
Рис. 3.32. Пример космического снимка Казахстана, выполненного с помощью российского спутника Ресурс-01 № 3
Высокая разрешающая способность космических фотоснимков в ряде случаев имеет и свои недостатки. В связи с общим ограничением на количество пикселей в снимках высокое разрешение означает также небольшую площадь картографируемой области, что не всегда хорошо. Так, в различных задачах мониторинга (например, своевременное обнаружение лесных пожаров) требуется регулярно получать свежие снимки одного и того же участка местности (для обнаружения пожаров желательно не реже одного раза в сутки). ДДЗ могут поступать пользователям напрямую со спутника, либо из архивов эксплуатирующей спутник компании. В первом случае у пользователя устанавливается станция спутникового приема, которая принимает всё изображение, снимаемое со спутника. Такой подход часто используется в спутниках со средним и низким разрешением (10-100 м), которые имеют регулярность пролета над одним и тем же участком Земли не реже, чем раз в неделю. Такие станции приема могут использоваться для создания регулярно действующих пунктов мониторинга различных природных явлений.
Рис. 3.33. Пример космического снимка г. Томска
Полученные со спутника данные пользователи на месте обрабатывают специальными программами и переводят в вид, понятный геоинформационным системам и специальным системам обработки ДДЗ. Во втором случае пользователь заказывает у эксплуатирующей организации снимки на заданный участок местности в заданном разрешении. Если такие снимки уже имеются, то они извлекаются из архивов и передаются покупателям. Иначе приходится делать съемку со спутника, что обычно стоит дороже, т.к. для этого необходимо выполнять переориентацию спутника. При передаче данных напрямую от эксплуатирующей спутник компании снимки поступают уже обработанными и преобразованными в необходимую систему координат. Такие снимки обычно могут быть сразу использованы в ГИС и системах обработки ДДЗ. Обработка ДДЗ на некоторых этапах напоминает векторизацию, однако существенно отличается от неё. Рассмотрим эти этапы: 1. Геометрическая и оптическая коррекция снимка. На данном этапе исправляются геометрические и оптические искажения, вызванные объективом сенсора, установленного на борту летательного аппарата. Математические параметры объектива обычно точно известны и данный этап не вызывает затруднений.
2. Привязка к требуемой картографической проекции. На данном этапе на основе точного положения в пространстве летательного аппарата, ориентации объектива сенсора и используемой системы координат выполняется преобразование изображения в некоторую проекцию для дальнейшей обработки. 3. Стереофотограмметрия предназначена для получения цифровой модели рельефа (ЦМР) на основе стереопар - пар перекрывающихся снимков. Для этого исходные снимки должны быть взаимно скоординированы и привязаны не только к некоторой проекции, но и к высотной системе координат. После этого в автоматическом или ручном режиме строится ЦМР. В ручном режиме пользователю обычно предоставляется возможность в стереорежиме (с помощью специальных очков с жидкокристаллическими шторками и обычного монитора, либо с помощью с помощью очков с двумя маленькими встроенными мониторами) просмотреть изображение, навести резкость на требуемый видимый объект, а программа определяет его положение в пространстве. 4. Ортокоррекция. Данная операция выполняет «поправку за рельеф», исправляя геометрические искажения, вызванные фотографированием в перспективе с неравномерностью реальных высот на местности (лучи света как бы выходят из точек местности и сходятся в объективе). Для выполнения такого преобразования необходимо знание карты высот на местности. После выполнения ортокоррекции получается неискаженный снимок, как будто он получен множеством параллельных лучей в ортографической проекции. 5. Склейка различных растров в единое полотно для сплошного покрытия территории. Для выполнения склейки на смежных растровых изображениях находятся общие объекты, координаты которых должны быть совмещены на карте. После этого программа подбирает оптимальное преобразование, позволяющее достичь заданных требований с минимальными искажениями растра. По окончании работы первых пяти этапов растр обычно преобразуется в новый, в котором исправлены все геометрические и проекционные искажения, сделана ортокоррекция («поправка за рельеф»), а также выполнена увязка данного растра со смежными. 6. Дешифрирование. Перечень операций, выполняемых на данном этапе, зависит от типа исходных данных и дешифрируемых объектов. Поэтому типичные растровые ГИС содержат богатый набор самых разнообразных инструментов. Вначале из растров производится выделение каналов, необходимых для выполнения дешифрирования. Затем растр подвергается яркостной коррекции (изменяется яркость и контраст изображения гистограммным или ручным способом). Фильтрация растров предназначена для улучшения качества изображения, удаления шумов и выделения интересующих объектов. Сглаживающие фильтры устанавливают яркость пикселя на основе усреднения с некоторыми положительными коэффициентами яркости смежных пикселей. При этом снижается визуально наблюдаемый шум.
Обратными к сглаживающим являются фильтры, выделяющие границы. В них усреднение яркостей смежных пикселей производится с различными по знаку (положительными и отрицательными) коэффициентами. Пороговая фильтрация используется для преобразования исходного растра в бинарный вид по условию превышения (или попадания в заданный диапазон) яркостей заданного значения. Таким образом можно достаточно легко выделить равномерно закрашенные (однородные) области, например, пашни, луга, реки, дороги и др. Несмотря на наличие многочисленных автоматизированных методик, по-прежнему актуальны «ручные» методы дешифрирования. Для этого растровые ГИС предоставляют возможности по тематической обработке растра, включающие в себя логические и арифметические операции, классификацию и различные способы отображения, помогающие визуально оценить растр и выделить необходимые объекты. Геодезические изыскания Самые точные сведения о пространственных объектах на Земле можно получить только в результате полевых геодезических изысканий. Раздел науки, занимающийся сбором и обработкой таких изысканий, называется инженерной геодезией. Геодезические приборы В настоящее время в геодезии наиболее часто используются следующие основные технические средства сбора информации: 1. Дальномеры (измерители расстояний). Сюда относятся рулетки (стальные, фиберглассовые и тканевые) и лазерные дальномеры (рис. 3.34). Лазерный дальномер излучает лазерный луч, который отражается от измеряемого объекта, а дальномер измеряет с высокой точностью время хода луча. После этого на основе измеренного времени дальномер вычисляет расстояние до объекта.
(а) (б) (в) (г)
Рис. 3.34. Измерители расстояний (а - стальная 15-метровая рулетка Stabilia 49; б - фиберглассовая 50-метровая рулетка Stabilia 42; в - лазерная рулетка Leica DISTO Classic 5 (лазер видимый); г - лазерный дальномер Yardage Pro 500 (лазер невидимый))
2. Оптические нивелиры (измерители превышений). Нивелиры предназначения для измерения превышения одного участка местности над другим. Прибор состоит из вращающегося вокруг вертикальной оси горизонтального круга, на котором установлена горизонтальная зрительная труба (рис. 3.35).
(а) (б) Рис. 3.35. Нивелиры (а - оптический нивелир Nikon AX-2S; б - цифровой оптический нивелир Trimble DiNi 12)
Перед началом работы с нивелиром первый изыскатель должен установить прибор строго горизонтально с помощью встроенного в прибор уровня, вращая регулировочные винты. После этого можно начинать выполнять съемку. К нивелиру прилагается специальная измерительная рейка, которая устанавливается вторым изыскателем в измеряемом месте. Далее первый изыскатель должен навести визир оптической трубы прибора на измерительную рейку, а затем записать видимое в трубе значение на рейке. 3. Лазерные уровни (лазерные нивелиры). Лазерный уровень, как и нивелир, предназначен для измерения превышений. Лазерный уровень состоит из горизонтального быстровращающегося круга, на котором установлен лазерный излучатель, обычно красного цвета (рис. 3.36).
(а) (б) Рис. 3.36. Лазерные уровни (а - лазерный построитель плоскости Topcon RL-VH3B; б - лазерный уклонофиксатор («трубный» лазер) Topcon TP-L4A)
Перед началом работы лазерный уровень устанавливается оператором горизонтально с помощью регулировочных винтов и встроенного уровня. Некоторые модели лазерных уровней устанавливают горизонталь автоматически. После включения прибора в пространстве вокруг него образуется красная плоскость, видимая человеческим глазом. Для измерения уровня Земли в любой требуемой точке вокруг прибора нужно установить там специальную измерительную линейку. После этого останется записать значение, указываемое лазерным лучом в месте его пересечения с линейкой. 4. Теодолиты (измерители углов). Теодолиты позволяют измерять вертикальные и горизонтальные углы. Прибор состоит из вращающегося вокруг вертикальной оси горизонтального круга (лимба) с алидадой, на подставки которой опирается горизонтальная ось вращения зрительной трубы и вертикального круга (рис. 3.37).
(а) (б) Рис. 3.37. Теодолиты (а - оптический теодолит УОМЗ 3T2КП; б - электронный цифровой теодолит Geo-Fennel FET 120)
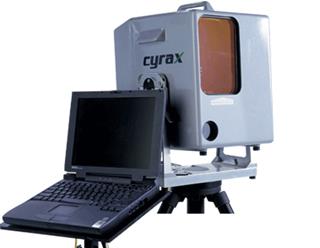
Перед началом работы с теодолитом оператор должен установить его строго горизонтально с помощью встроенного в прибор уровня, вращая регулировочные винты. После этого можно выполнять съемку. Для этого оператор должен навести визир оптической трубы прибора на отражатель или измеряемый объект, а затем записать вертикальный и горизонтальный углы, показываемые прибором. 5. Тахеометры. Тахеометром называют теодолит, совмещенный с дальномером. Современные электронные тахеометры оснащаются микрокомпьютерами, которые показывают на дисплее вычисленные углы и расстояния, а также могут сразу же преобразовывать их в координаты на местности. Тахеометры бывают отражательные и безотражательные. Отражательные тахеометры требуют для своей работы отражателей, устанавливаемых на вешках (рис. 3.38). Безотражательные тахеометры используют в своей работе мощный лазерный луч, который может отражаться от любых объектов на местности. При работе с обычным тахеометром, оператор должен навести визир оптической трубы прибора на отражатель, а затем нажать кнопку выполнения съемки. Для работы с автоматизированными тахеометрами не требуется оператора, стоящего у тахеометра и наводящего прибор на отражатель. Кнопка выполнения съемки находится на вешке с отражателем. При нажатии этой кнопки радиосигнал с вешки передается на тахеометр, тот самостоятельно выполняет наведение по радиосигналу и выполняет съемку точки (рис. 3.38, в). 6. Лазерный сканер. Лазерные сканеры по своим функциям похожи на электронные безотражательные тахеометры (они измеряют углы и расстояния до любых объектов), но они выполняют измерения не по одной точке, указываемой оператором, а сразу пакетами. Сканеры перемещают лазерный луч по горизонтали и вертикали, снимая подряд все объекты, попадающие на пути (рис. 3.39). В результате образуется плотная сеть точек съемки.
(а) (б) (в) Рис. 3.38. Тахеометры (а - электронный тахеометр South NTS-352;
(а) (б) Рис. 3.39. Лазерные сканеры (а - MENSI GS200, б - Leica CYRAX 2500)
7. Приборы спутниковой навигации. Системы спутниковой навигации рассматриваются в п. 3.9. В настоящее время в геодезии применяются геодезические приемники систем GPS и ГЛОНАСС. При проведении геодезических изысканий они используются обычно только для съемки отдельных ключевых точек на местности, например, тех, где устанавливаются тахеометры. Это связано с низкой скоростью работы спутниковых приемников и их невысокой точностью. Тахеометрическая съемка Процесс геодезической съемки обычно состоит из двух основных этапов: планово-высотного съемочного обоснования и собственно съемки интересующих точек на местности. В результате выполнения съемочного обоснования с высокой точностью определяется положение станций (обычно это места установки таких геодезических приборов, как нивелиры, теодолиты, тахеометры, лазерные сканеры) в пространстве. После этого выполняется уже сама съемка с этих станций. В настоящее время для планово-высотного съемочного обоснования большинства инженерно-геодезических работ используется метод теодолитного (тахеометрического) хода. Теодолитный ход - это последовательность пунктов (станций) на местности, увязанных между собой с помощью геодезических измерений. В каждом пункте теодолитного хода устанавливается теодолит или тахеометр, а затем измеряются углы и расстояния до предыдущего и следующего пункта хода. На рис. 3.40 приведены 2 примера теодолитных ходов (разомкнутый и замкнутый). Цифрами 1-9 на рисунке показаны места установки теодолита, буквами A и B - пункты с известными координатами,
(а) (б) Рис. 3.40. Теодолитные ходы (а - разомкнутый, б - замкнутый)
Для того чтобы установить реальные координаты пунктов теодолитного хода необходимо выполнить привязку этого хода к некоторой системе координат. Привязка выполняется к некоторым пунктам на местности, которые имеют известные координаты. Это могут быть пункты государственной геодезической сети (пункты A и В на рис. 3.42) либо любые иные пункты, координаты которых измерены с помощью приборов спутникового позиционирования. В случае, если в пункте геодезической сети есть возможность точно установить направление на север и соответственно угол В приведенных на рис. 3.42 примерах теодолитных ходов никак не учтена высота пунктов хода. В теодолитно-нивелирном ходе дополнительно с помощью нивелира определяется превышение каждого очередного пункта по отношению к предыдущему и к следующему. В теодолитно-тахеометрическом ходе дополнительно с помощью тахеометра (или теодолита с дальномером) определяется горизонтальный угол и расстояние от каждого очередного пункта до предыдущего и следующего. Всем выполняемым измерениями с помощью геодезических приборов всегда присуща некоторая погрешность, связанная с точностью приборов, точностью их установки на местности, погодными условиями и индивидуальными особенностями человека, выполняющего измерения. Именно поэтому при выполнении съемки необходимо закладывать некоторую избыточность измерений, например, делая привязку теодолитного хода к 3 и более геодезическим пунктам, выполняя дополнительные измерения углов. Ещё один распространенный прием повышения точности вычислений заключается в увеличении количества измерений за счет выполнения обратного теодолитного хода, когда повторно выполняются все измерения углов и расстояний, но в обратном порядке, от последнего пункта к первому. В результате выполнения избыточных измерений теоретическая сумма всех измеренных углов должны быть кратна 180°, если взять углы поворотов налево со знаком плюс, а направо - со знаком минус. Однако в действительности сумма измеренных углов будет несколько иная. Величина отличия теоретической суммы от суммы измеренных углов называется угловой невязкой хода. Суть углового уравнивания теодолитного хода заключается в распределении общей величины угловой невязки хода на все выполненные измерения. В самом простом способе уравнивания величина угловой невязки делится на общее число измеренных углов и получается поправка, на которую изменяется каждый измеренный угол. После выполнения углового уравнивания необходимо уравнять плановые координаты точек. Для этого надо вначале вычислить координаты всех известных геодезических пунктов на основе положения остальных пунктов. Эти координаты будут отличаться от известных значений геодезических пунктов на величину плановой невязки. Полученная плановая невязка с помощью планового уравнивания распределяется на каждую сторону хода пропорционально длинам сторон хода. В результате корректируются углы После выполнения теодолитного хода и его уравнивания мы получаем с высокой точностью координаты всех станций хода и углы между его сторонами. Теперь рассмотрим, как теодолитный ход используется в реальной геодезической работе. Теодолитный ход прокладывается на местности не ради самого себя, а для того, чтобы закрепить на местности положения станций и выполнить съемку пикетов - разных характерных точек на поверхности Земли. Съемка пикетов выполняется теодолитами (тахеометрами) так же, как и съемка других станций хода, т.е. измеряя расстояния и углы на пикеты со станций (рис. 3.41). Позже, уже выполняя камеральную обработку результатов геодезических изысканий, эти расстояния и углы пересчитываются в реальные координаты пикетов на местности. Причем этот пересчет должен выполняться после уравнивания теодолитного хода, когда положения станций уже установлены с высокой точностью.
Рис. 3.41. Тахеометрическая съемка пикетов
Линейные изыскания Ещё одним распространенным видом инженерно-геодезических изысканий, помимо тахеометрической съемки, являются изыскания вдоль некоторого линейно-протяженного объекта. Такие изыскания называют линейными. Линейные изыскания состоят из трёх этапов: 1. Прокладки трассы и закрепления её на местности. 2. Выполнение пикетажных изысканий. 3. Нивелирование по поперечникам. Этот этап часто выполняется одновременно с предыдущим. Итак, для проведения линейных изысканий вначале на местности прокладывается трасса - некоторая линия, идущая вдоль линейного объекта (рис. 3.42). Затем от начала трассы на местности через 100 м откладывают пикеты (отметим, что термин «пикет» здесь используется в ином смысле, чем в предыдущем пункте; здесь «пикет» - не съемочная точка, а некоторая условная отметка на оси трассы). Пикеты иногда откладываются через 10, 25, 50, 500, 1000 м или иное расстояние, а иногда даже и через нерегулярные интервалы.
Рис. 3.42. Линейные изыскания (пикетажные и нивелировочные измерения)
Каждая точка на трассе откладывается от начала какого-то очередного пикета и обозначается в формате ПК<Номер пикета>+<Расстояние от начала пикета> (например, ПК0+55). Далее выполняется съемка каждой интересующей точки на местности. Для этого через каждую точку проводится поперечник к трассе, т.е. строится перпендикуляр к линии трассы, проходящий через данную точку, и измеряется расстояние от этой точки по перпендикуляру до трассы. Для точек, находящихся справа от трассы, результат записывается в виде П+<Расстояние до трассы > (например, П+20 или просто +20), для точек слева от трассы - в виде Л+<Расстояние до трассы > (например, Л+20 или просто -20). Геодезические построения В последнее время при выполнении геодезических изысканий всё чаще используют тахеометры, позволяющих выполнять любые виды съемки на местности. Тем не менее, для ряда задач по-прежнему используются более простые приборы, например, нивелиры, теодолиты, рулетки. Это обосновано как технически и технологически, так и экономически. Во-первых, использование нивелиров и теодолитов зачастую проще и быстрее, чем полноценное применение тахеометров, т.к. не требуется точной и достаточно продолжительной установки и геодезической привязки тахеометрической станции. Это возникает в тех случаях, когда не требуется точного трехмерного измерения координат съемочных точек. Например, при съемке ровной поверхности автомобильной дороги без колейности нет большого смысла в точной плановой съемке точек, гораздо более важными являются высотные отметки. С другой стороны, при съемке объектов инженерного обустройства в кадастровых задачах не важны высотные отметки дорожных знаков, ограждений, столбов линий электропередачи; важным является плановое положение этих объектов. Во-вторых, современные электронные тахеометры стоят существенно дороже обычных нивелиров, теодолитов и дальномеров вместе взятых. Так, цена электронного тахеометра колеблется в диапазоне от 4 500 долларов до 10 000 долларов (например, китайский South NTS-327 стоит 4 500 долларов, японский Sokkia SET 530 R - 9 500 долларов), в то время как оптические нивелиры стоят около 160 - 1 500 долларов, оптические теодолиты российского производства (УОМЗ - Уральский оптико-механический завод, г. Екатеринбург) стоят 550 - 1 050 долларов, а ручные лазерные дальномеры - 330 - 800 долларов. В данном разделе рассматриваются геодезические построения - специальные математические приемы, позволяющие в ряде случаев упростить применение таких обычных геодезических приборов, как нивелиры, теодолиты и дальномеры, когда нет возможности напрямую воспользоваться для измерений имеющимися приборами. Например, нам необходимо измерить расстояние до объекта, находящегося на другом краю оврага, а у нас в наличии имеется только рулетка и теодолит, т.е. мы не может напрямую измерить расстояние между двумя точками на местности. Рассмотрим основные виды геодезических построений: 1. Пересечение двух отрезков. Этот способ предназначен для получения координат точки, находящейся в створе двух пар точек, т.е. размещенной в месте пересечения двух отрезков. Для этого должны быть известны координаты 4 точек - координат концов этих отрезков (рис. 3.43, а).
Рис. 3.43. Простые геометрические построения (пересечения отрезков и построения по трём точкам)
2. Построение по трём точкам. Этот метод предполагает, что неизвестная точка находится в углу параллелограмма, три другие точки которого известны (рис. 3.43, б). 3. Линейная засечка. В способе линейной засечке дальномером определяются только расстояния от измеряемой точки до двух известных точек (рис. 3.44, а).
Рис. 3.44. Различные виды засечек (линейная, полярная и угловые засечки)
4. Полярная засечка. В этом методе с помощью теодолита нужно измерить угол между направлением на измеряемую точку и створом двух известных точек. Кроме того, с помощью дальномера нужно определить расстояние от теодолита до измеряемой точки (рис. 3.44, б). 5. Прямая угловая засечка. Этот метод наиболее часто применяется при теодолитной съемке труднодоступных точек местности. В методе с помощью теодолита из двух известных точек нужно измерить углы между измеряемой и другой известной точкой (рис. 3.44, в). 6. Обратная угловая засечка. Данный способ позволяет определить положение станции с теодолитом на местности, выполнив измерения двух углов между направлениями на три известных пункта (рис. 3.44, г).
Рис. 3.45. Створная засечка и построения по параллелям и перпендикулярам
7. Створная засечка. Этот метод позволяет определить положение точки, находящейся в створе двух известных точек, если дано расстояние от измеряемой точки до одной из точек в створе (рис. 3.45, а). 8. Построение по параллельной линии. Данный метод предназначен для определения положения точки, находящейся на линии, проходящей через заданную точку и параллельную другой линии, построенной по 2 другим известным точкам (рис. 3.45, б). 9. Построение перпендикуляром в створ. В этом методе искомая точка находятся в месте пересечения створа между двумя известными точками со своим перпендикуляром, проведенными через другую известную точку (рис. 3.45, в). 10. Построение перпендикуляром из створа. Этот метод позволяет определить положение точки, если дана длина перпендикуляра из этой точки до створа двух точек, и известно расстояние от места пересечения этого перпендикуляра со створом до одной из точек створа (рис. 3.45, г).
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 2364; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.73.198 (0.016 с.) |

















 - измеренные теодолитом (тахеометром) углы между направлениями на предыдущий и следующий пункт,
- измеренные теодолитом (тахеометром) углы между направлениями на предыдущий и следующий пункт,  - измеренные каким-либо дальномером (например, встроенным в тахеометр) расстояния между пунктами i и j. Участки между последовательными пунктами ходы называются сторонами хода.
- измеренные каким-либо дальномером (например, встроенным в тахеометр) расстояния между пунктами i и j. Участки между последовательными пунктами ходы называются сторонами хода.
 (рис. 3.42), то достаточно выполнить привязку теодолитного хода только к одному известному пункту. Иначе привязка должна выполняться, по крайней мере, к двум известным пунктам, обычно в начале и в конце теодолитного хода. Если ход замкнутый, то привязку надо делать в начале и в середине хода.
(рис. 3.42), то достаточно выполнить привязку теодолитного хода только к одному известному пункту. Иначе привязка должна выполняться, по крайней мере, к двум известным пунктам, обычно в начале и в конце теодолитного хода. Если ход замкнутый, то привязку надо делать в начале и в середине хода.