
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Что нужно знать для управления?Содержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
Цель любого управления – изменить состояние объекта нужным образом (в соответствии с заданием). Теория автоматического регулирования должна ответить на вопрос: «как постро-ить регулятор, который может управлять данным объектом так, чтобы достичь цели?» Для это-го разработчику необходимо знать, как система управления будет реагировать на разные воз-действия, то есть нужна модель системы: объекта, привода, датчиков, каналов связи, возмуще-ний, шумов.
Модель –это объект,который мы используем для изучения другого объекта(оригинала).Модель и оригинал должны быть в чем-то похожи, чтобы выводы, сделанные при изучении мо-дели, можно было бы (с некоторой вероятностью) перенести на оригинал. Нас будут интересо-вать в первую очередь математические модели, выраженные в виде формул. Кроме того, в науке используются также описательные (словесные), графические, табличные и другие моде-ли.
Связь входа и выхода
Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы – это возможные воздействия на объект, выходы – это те сигналы, которые можно измерить. На-пример, для электродвигателя входами могут быть напряжение питания и нагрузка, а выходами
– частота вращения вала, температура. Входы независимы, они «приходят» из внешней среды. При изменении информации на входе меняется внутреннее состояние объекта (так называют его изменяющиеся свойства) и, как следствие, выходы:
Это значит, что существует некоторое правило, по которому ход y. Это правило называется оператором. Запись y = U [ x ]
элемент преобразует вход x в вы-означает, что выход y получен в
результате применения оператора U ко входу x.
Построить модель – это значит найти оператор, связывающий входы и выходы. С его по-мощью можно предсказать реакцию объекта на любой входной сигнал. Рассмотрим электродвигатель постоянного тока. Вход этого объекта – это напряжение пи-тания (в вольтах), выход – частота вращения (в оборотах в секунду). Будем считать, что при на-пряжении 1 В частота вращения равна 1 об/сек, а при напряжении 2 В – 2 об/ сек, то есть часто-та вращения равна по величине напряжению1. Легко видеть, что действие такого оператора можно записать в виде
U [ x ]= x.
Теперь предположим, что этот же двигатель вращает колесо и в качестве выхода объекта мы выбрали число оборотов колеса относительно начального положения (в момент t = 0). В этом случае при равномерном вращении произведение x ⋅∆ t дает нам количество оборотов за время ∆ t, то есть y (t) = x ⋅∆ t (здесь запись y (t) явно обозначает зависимость выхода от време-
ни t). Можно ли считать, что этой формулой мы определили оператор U? Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Ес-ли напряжение на входе x (t) меняется (все равно как!), угол поворота запишется в виде инте-
грала
1 Конечно, это будет справедливо только в некотором диапазоне напряжений.
© К.Ю. Поляков, 2008
U [ x ]=∫ t x (t) dt.
Оператор, который действует по такому правилу, называется оператором интегрирова-ния. С помощью этого оператора можно,например,описать наполнение пустого бака водой.Если сечение бака S (в м2) постоянно по всей его высоте, то уровень воды h определяется как интеграл от потока воды q (в м3/с), деленный на S:
h (t)=1∫ t q (t) dt, S 0
Обратный оператор – оператор дифференцирования – вычисляет производную:
U [ x (t)]= x &(t)= dxdt (t).
Как мы увидим, этот оператор играет очень важную роль в описании объектов управления. Обычно оператор дифференцирования обозначается буквой p. Запись y (t) = p x (t) внешне
выглядит как «умножение» оператора p на сигнал x (t), но на самом деле обозначает действие этого оператора, то есть дифференцирование:
Где встречаются такие операторы? Приведем примеры из электротехники. Например, из-вестно, что ток i (в амперах), проходящий по цепи с конденсатором, пропорционален произ-водной от разности потенциалов u (в вольтах) на его пластинах: i
i
Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на практике. Чтобы понять это вспомним, что при мгновенном изме-нении сигнала его производная (скорость возрастания) будет равна бесконечности, а никакое реальное устройство не может работать с бесконечными сигналами.
Как строятся модели?
Во-первых, математические модели могут быть получены теоретически из законов физи-ки (законы сохранения массы,энергии,импульса).Эти модели описывают внутренние связи вобъекте и, как правило, наиболее точны.
Рассмотрим RLC- цепочку, то есть последовательное соединение резистора с сопротивле-нием R (в омах), катушки индуктивности с индуктивностью L и конденсатора с емкостью C. Она может быть описана с помощью двух уравнений:
u (t)= uc (t)+ L di dt (t) + R ⋅ i (t)
i (t)= C duc (t) dt
Первое уравнение означает, что разность потенциалов на концах RLC- цепочки равна сумме разностей потенциалов на всех промежуточных участках. Разность потенциалов R ⋅ i (t) на рези-
© К.Ю. Поляков, 2008
сторе вычисляется по закону Ома, а на катушке – по формуле, приведенной в предыдущем па-раграфе. Второе уравнение описывает связь между напряжением и током для конденсатора. Вход этого объекта – напряжение u (t) на концах цепочки, а выход – разность потенциалов
uc (t)на пластинах конденсатора.
Второй способ – построение модели в результате наблюдения за объектом при различ-ных входных сигналах (этим занимается теория идентификации). Объект рассматривается как «черный ящик», то есть, его внутреннее устройство неизвестно. Мы смотрим, как он реагирует на входные сигналы, и стараемся подстроить модель так, чтобы выходы модели и объекта сов-падали как можно точнее при разнообразных входах.
На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход и выход) определяется из теории, а коэффициенты находят опытным путем. Например, общий вид уравнений движения корабля хорошо известен, однако в этих уравнениях есть коэффициенты, которые зависят от многих факторов (формы корпуса, шероховатости по-верхности и т.п.), так что их крайне сложно (или невозможно) найти теоретически. В этом слу-чае для определения неизвестных коэффициентов строят масштабные модели и испытывают их в бассейнах по специальным методикам. В авиастроении для тех же целей используют аэроди-намические трубы.
Для любого объекта управления можно построить множество различных моделей, кото-рые будут учитывать (или не учитывать) те или иные факторы. Обычно на первом этапе стара-ются описать объект как можно более подробно, составить детальную модель. Однако при этом будет трудно теоретически рассчитать закон управления, который отвечает заданным требова-ниям к системе. Даже если мы сможем его рассчитать, он может оказаться слишком сложным для реализации или очень дорогим.
С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», кото-рые кажутся разработчику маловажными. Для упрощенной модели закон управления также по-лучается проще, и с его помощью часто можно добиться желаемого результата. Однако в этом случае нет гарантии, что он будет так же хорошо управлять полной моделью (и реальным объ-ектом).
Обычно используется компромиссный вариант. Начинают с простых моделей, стараясь спроектировать регулятор так, чтобы он «подходил» и для сложной модели. Это свойство назы-вают робастностью (грубостью) регулятора (или системы), оно означает нечувствительность к ошибкам моделирования. Затем проверяют работу построенного закона управления на полной модели или на реальном объекте. Если получен отрицательный результат (простой регулятор «не работает»), усложняют модель, вводя в нее дополнительные подробности. И все начинается сначала.
Линейность и нелинейность
Из школьной математики известно, что проще всего решать линейные уравнения. С нели-нейными уравнениями (квадратными, кубическими и др.) работать намного сложнее, многие типы уравнений математика пока не умеет решать аналитически (точно). Среди операторов самые простые – также линейные. Они обладают двумя свойствами2: • умножение на константу: U [ α ⋅ x ]= α ⋅ U [ x ],где α –любая постоянная(то есть,приувеличении входа в несколько раз выход увеличивается во столько же раз); • принцип суперпозиции:если на вход подать сумму двух сигналов,выход будет пред-ставлять собой сумму реакций того же оператора на отдельные сигналы:
U [ x 1+ x 2]= U [ x 1]+ U [ x 2].
Модели, которые описываются линейными операторами, называются линейными. С ними можно работать с помощью методов теории линейных систем, которая наиболее развита и по-зволяет точно решать большинство известных практических задач.
2 В математике эти свойства называют однородность и аддитивность.
© К.Ю. Поляков, 2008
Однако, все модели реальных систем – нелинейные. Это легко понять хотя бы потому, что всегда есть предельно допустимое значение входного сигнала – при его превышении объект может просто выйти из строя или даже разрушиться (линейность нарушается). Методы иссле-дования нелинейных операторов очень сложны математически, в теории нелинейных систем точные решения известны только для достаточно узкого круга задач. Здесь пока больше «белых пятен», чем полученных результатов, хотя это научное направление активно развивается в по-следние годы.
Что же делать? Чаще всего сначала проводят линеаризацию нелинейной модели объекта (привода), то есть строят приближенную линейную модель. Затем на основе этой модели про-ектируют закон управления, применяя точные методы теории линейных систем. Наконец, про-веряют полученный регулятор с помощью компьютерного моделирования на полной нелиней-ной модели.
Нужно отметить, что если объект или привод имеют так называемую «существенную» не-линейность, этот подход может не сработать. Тогда приходится использовать методы нелиней-ной теории, а также компьютерное моделирование. Моделирование стало очень популярным в последнее время, поскольку появились мощные компьютерные программы для проведения вы-числительных экспериментов, и можно проверить поведение системы при разнообразных до-пустимых входных сигналах.
Таким образом, в классификацию систем управления в разделе 1.3 нужно добавить еще одно деление, может быть, самое существенное – системы бывают линейные и нелинейные. В линейных системах все звенья описываются линейными операторами, и это значительно упро-щает работу с ними.
Линеаризация уравнений
Вы уже знаете, что в теории управления лучше всего разработаны методы исследования линейных систем. Однако строго линейных систем в окружающем нас мире не существует. По-этому для того, чтобы эти методы можно было применить на практике, нужно выполнить ли-неаризацию –построить приближенную линейную модель на основе более реалистичной нели-нейной модели объекта.
2.5.1. Алгебраические уравнения
S 0 q
v –ско-
рость вытекания жидкости (в м/с). Отсюда получаем v = 2 gh. Учитывая, что расход воды вы-
числяется как q = S 0 ⋅ v, находим
q = α
где α = S 0 2 g – постоянная величина. Это статическая модель, потому что она не содержит
производных, характеризующих изменение сигналов во времени. Статическая модель описыва-ет установившееся состояние (статический режим), когда в баке поддерживается постоянный уровень воды и поток вытекающей воды тоже постоянный.
© К.Ю. Поляков, 2008
Очевидно, что модель (2) – нелинейная, поскольку содержит
эффициент. Как его выбрать? На этот вопрос нет однозначного ответа.
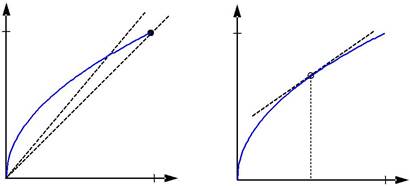
Предположим, что уровень воды изменяется в интервале от 0 до 1 м. Тогда один из вари-антов – вычислить коэффициент как угол наклона отрезка, соединяющего точки кривой
q = α
получаем k =1.
Конечно, эта модель очень грубая и дает большую ошибку, особенно для уровней в диапа-зоне от 0,1 до 0,6. Чтобы уменьшить ошибку, можно попробовать несколько изменить k (на-пример, увеличив его до 1,2), однако точность приближения по-прежнему будет невысока, хотя
Теперь предположим, что обычно уровень мало изменяется вблизи среднего значения h =0,5м.В этом случае можно применить другой подход.Заметим,что в этой области кривая
Принцип суперпозиции также не выполняется. Для того, чтобы получить из (3) линейную модель, нужно записать уравнения в откло-нениях от рабочей точки (h 0; q 0),в которой мы определяли наклон касательной.Из(3)следу-
ет, что
всего соответствует объекту вблизи этой точки, а при больших отклонениях от нее ошибка мо-жет значительно возрастать.
На этом простом примере мы познакомились с основными принципами линеаризации не-линейных алгебраических уравнений. В следующем параграфе те же самые идеи используются для более сложной модели, которая описывает динамику системы (изменение во времени).
2.5.2. Дифференциальные уравнения
Реальные объекты не могут мгновенно изменять свое состояние, поэтому вместо статиче-ских моделей типа (2) для их исследования используют динамические модели, которые описы-ваются дифференциальными уравнениями, содержащими производные (скорости изменения сигналов). Как мы видели в разделе 2.3, такие модели могут быть получены из физических за-конов. Во многих случаях более или менее точные модели представляют собой нелинейные дифференциальные уравнения, поэтому для того, чтобы применить теорию линейных систем, требуется линеаризация. При этом применяется почти та же методика, что и для алгебраических уравнений.
Идея линеаризации заключается в том, что в системах регулирования (поддержания за-данных значений величин) сигналы мало отклоняются от рабочей точки – некоторого положе-ния равновесия, в котором все сигналы имеют «правильные» значения и их производные равны нулю. Поэтому для решения задач управления часто достаточно использовать линейную модель в отклонениях от этой рабочей точки.
Модель, только что построенная для бака с водой, не совсем правильная, потому что не учитывает, что уровень в баке изменяется – уменьшается по мере вытекания воды. Кроме того, предположим, что для поддержания уровня используется насос, который подкачивает воду в бак, его расход обозначим через Q. Для такого объекта входом является расход Q, а выходом –
изменение уровня h.
Предположим, что в течение маленького интервала ∆ t расходы Q и q можно считать по-стоянным. За это время объем воды, добавленной в бак насосом, равен Q ⋅∆ t, а объем «ушед-
Эта модель учитывает, что уровень воды и расходы изменяются во времени. Вспомним, что
© К.Ю. Поляков, 2008
Здесь остались только две изменяющиеся величины: расход насоса Q (t) (вход объекта) и уро-вень воды h (t) (выход). Далее для упрощения записи мы не будем явно указывать зависимость
этих сигналов от времени.
В установившемся (статическом) режиме, когда сигналы не изменяются, все производ-
ные равны нулю. В нашем случае, приняв dhdt (t) = 0 в (6), получаем
Теперь предположим, что задана некоторая рабочая точка, то есть, значения входа Q = Q 0 и выхода h = h 0 удовлетворяют уравнению (7), и система все время работает около этого поло-
жения равновесия. Вблизи этой точки
Q = Q 0+ ∆ Q и h = h 0+ ∆ h,
где ∆ Q и ∆ h – малые отклонения входа и выхода от рабочей точки.
Дальше для линеаризации используется разложение функций в ряд Тейлора. Для некото-
F (x, y)зависит от высших производных в той же точке(второй,третьей и т.д.).При малых зна-
|

 U
U



 i (t)= C dudt (t)= C p u (t) u
i (t)= C dudt (t)= C p u (t) u Здесь C – емкость конденсатора (измеряется в фарадах). Кроме того, падение напряжения u на катушке индуктивности пропорционально производной от проходящего тока i:
Здесь C – емкость конденсатора (измеряется в фарадах). Кроме того, падение напряжения u на катушке индуктивности пропорционально производной от проходящего тока i:
 u (t)= L didt (t)= L p i (t) u
u (t)= L didt (t)= L p i (t) u где L – индуктивность (измеряется в генри).
где L – индуктивность (измеряется в генри).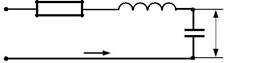



 Здесь ρ – плотность жидкости (в кг/м3), g ≈ 9,81 м/с2 – ускорение свободного падения,
Здесь ρ – плотность жидкости (в кг/м3), g ≈ 9,81 м/с2 – ускорение свободного падения,

 h, (2)
h, (2)

 k =0,707 k =1
k =0,707 k =1 
 q = α h почти совпадает с касательной в точке(0,5;
q = α h почти совпадает с касательной в точке(0,5;



 Это линейное уравнение, однако модель (3) – нелинейная, поскольку для нее не выполняется, например, свойство умножения на константу. Это легко проверить, сравнив U [2 ⋅ h ] и 2 ⋅ U [ h ]:
Это линейное уравнение, однако модель (3) – нелинейная, поскольку для нее не выполняется, например, свойство умножения на константу. Это легко проверить, сравнив U [2 ⋅ h ] и 2 ⋅ U [ h ]:

 Поскольку график зависимости (3) проходит через точку (h 0; q 0), можно применить равенство
Поскольку график зависимости (3) проходит через точку (h 0; q 0), можно применить равенство q
q
 Полученное таким образом уравнение – это линейная модель объекта, записанная в отклонени-ях входа и выхода от номинальной (рабочей) точки (h 0; q 0). Приближенная модель (5) точнее
Полученное таким образом уравнение – это линейная модель объекта, записанная в отклонени-ях входа и выхода от номинальной (рабочей) точки (h 0; q 0). Приближенная модель (5) точнее


 Эта зависимость между установившимися значениями входа Q и выхода h называется статиче-ской характеристикой. Она позволяет для любого заданного постоянного значения Q на входеполучить значение выхода h.
Эта зависимость между установившимися значениями входа Q и выхода h называется статиче-ской характеристикой. Она позволяет для любого заданного постоянного значения Q на входеполучить значение выхода h.






