Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принципы построения систем автоматического управленияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Построение САР базируется на ряде общих принципов регулирования, основные из которых следующие: регулирование по отклонению, регулирование по возмущению, комбинированное регулирование и принцип адаптации.
Величина ε(t), называемая отклонением или ошибкой системы регулирования, не должна превышать определенного значения.
Рисунок 2.6 — Системы автоматического регулирования а) по отклонению; б) по возмущению; в) комбинированная. Отличительной чертой систем, построенных по данному принципу, является их универсальность. Это качество проявляется в том, что любое отклонение регулируемого параметра от его заданного значения вызывает появление регулирующего воздействия независимо от числа, вида и места приложения возмущений f(t). Одним регулирующим воздействием часто достигается удовлетворительная компенсация нескольких возмущений. Это особенно важно, когда объект регулирования подвержен воздействию многочисленных возмущений, влияние которых на регулируемый параметр невозможно предусмотреть. Примером САР, построенной по принципу регулирования по отклонению, являются системы регулирования напряжения генератора (рис. 2.4). Сущность принципа регулирования по возмущению или принципа компенсации, состоит в том, что из различных возмущений, действующих в системе, выбирается одно, главное, на которое и реагирует САР (рис. 2.6, б). В этом случае компенсируется влияние на регулируемый параметр только основного возмущающего воздействия и регулирующее воздействие вырабатывается в системе в зависимости от результатов измерения основного возмущения, действующего на объект. САР, построенная по принципу регулирования по возмущению, показана на рис. 2.7. Система предназначена для поддержания напряжения генератора постоянного тока на определенном уровне. Объектом регулирования здесь является генератор G, а регулируемым параметром — напряжение на его зажимах Ur. Основными возмущающими воздействиями на генератор являются изменение тока нагрузки Iн и изменение частоты вращения n вала приводного двигателя М. Одно из них (изменение тока нагрузки Iн) измеряется обмоткой управления ОУ, включенной последовательно в цепь нагрузки. Эта же обмотка осуществляет регулирующее воздействие на объект в виде дополнительного изменения потока возбуждения генератора.
Рисунок 2.7 — САР, работающая по принципу возмущения Достоинство этого принципа регулирования заключается в том, что влияние возмущающего воздействия может быть устранено до того, как произойдет отклонение регулируемого параметра, так как регулятор действует на объект без запаздывания по отношению к возникшему возмущению. Каждый из рассмотренных принципов регулирования — по отклонению и по возмущению — имеет свои достоинства и недостатки. Поэтому для создания автоматических систем высокой точности обычно используют принцип комбинированного регулирования, сочетающий в себе оба принципа регулирования (рис. 2.6, в). На рисунке 2.8 представлена условная схема комбинированной системы автоматического регулирования частоты вращения двигателя постоянного тока. Принцип регулирования по отклонению реализован на измерении частоты вращения тахогенератором, напряжения с которого поступает на суммирующий ОУ. Основным возмущающим воздействием является изменение момента на валу двигателя – с помощью датчика момента реализуется принцип регулирования по возмущению. Операционный усилитель суммирует сигналы с датчиков и с задающего устройства и подаёт управляющее напряжение на выпрямитель, который в свою очередь управляет работой двигателя.
Рисунок 2.8 – Комбинированной системы автоматического регулирования скорости двигателя постоянного тока Принцип адаптации (приспособления) используется в самонастраивающих автоматических системах регулирования (САСР). Особенностью САСР является то, что они автоматически приспосабливаются к изменяющимся условиям работы и автоматически выбирают оптимальный закон регулирования.
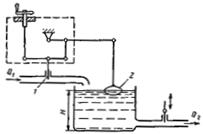
Важным признаком деления САР является зависимость между значением регулируемого параметра в установившемся режиме и величиной внешнего воздействия (возмущения) на объект регулирования. По виду этой зависимости САР делят на статические и астатические. Статической САР называется такая система, в которой в установившемся состоянии имеется однозначная зависимость между отклонением регулируемого параметра от заданного значения и величиной возмущающего воздействия, например, изменением нагрузки объекта регулирования. В статических системах регулирования значение регулирующего воздействия r(t) однозначно связано с отклонением регулируемого параметра у (t) от его заданного значения. Поэтому для создания необходимого регулирующего воздействия нужно, чтобы имело место отклонение регулируемого параметра. Вследствие этого в статической САР всегда имеется остаточное отклонение регулируемого параметра от заданного значения. Примером простейшей статической системы может служить автоматический регулятор уровня жидкости, схема которого приведена на рис. 2.9.
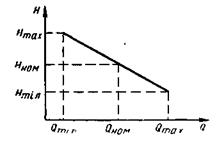
Рисунок 2.9 – Система автоматического регулирования уровня Поплавок 2, измеряющий уровень Н в резервуаре, жестко связан с регулирующим органом - задвижкой, которая изменяет величину притока Q1 жидкости в объект регулирования - резервуар. Нагрузкой объекта является сток Q2. В установившемся режиме при неизменной нагрузке сток и приток равны, и в системе поддерживается некоторый постоянный уровень жидкости. При изменении стока (нагрузки), т. е. при наличии возмущения, для поддержания постоянного уровня необходимо изменить приток, что возможно только при смене положения задвижки 1, а следовательно, положения поплавка, определяемого уровнем жидкости в резервуаре. Каждому значению нагрузки соответствует одно определенное положение уровня - регулируемого параметра. Статическая характеристика - зависимость выходной величины (регулируемого параметра) от входной (нагрузки) будет линейной. Астатической САР называется такая система, которая в установившемся режиме не имеет остаточного отклонения регулируемого параметра при любой величине возмущения. Значение регулируемого параметра не зависит от нагрузки. На рис. 2.10показана схема астатической системы регулирования уровня жидкости.
Рисунок 2.10 – Астатическая САР Поплавок 1 в этой схеме управляет ползунком реостата 5, через который питает цепь якоря исполнительного двигателя 2, перемещающего через редуктор 3задвижку 4. Среднее положение ползунка реостата соответствует заданному значению уровня жидкости. При изменении нагрузки (стока - Q2) уровень отклоняется от заданного значения, и двигатель начинает вращаться, переставляя задвижку 4до тех пор, пока уровень опять не достигнет заданного значения, а величина притока Q1 не будет равна новой величине стока Q'2 (Q'2 = Q’1). Таким образом, в установившемся режиме любому значению стока Q2 (нагрузки) соответствует одна определенная высота уровня. На рис. 2.10представлена статическая характеристика астатической системы, которая изображается отрезком горизонтальной прямой.
|
|||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 591; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.186.27 (0.011 с.) |

 Принцип регулирования по отклонению поясняется схемой (рис. 2.6, а), состоящей из двух составных частей - объекта регулирования ОР и регулятора Р, взаимосвязанных между собой цепью обратной связи. Регулируемый параметр у(t) сравнивается с заданным значением g(t). На основании разности этих двух величин ε(t) = g(t) - у(t) вырабатывается регулирующее воздействие r(t).
Принцип регулирования по отклонению поясняется схемой (рис. 2.6, а), состоящей из двух составных частей - объекта регулирования ОР и регулятора Р, взаимосвязанных между собой цепью обратной связи. Регулируемый параметр у(t) сравнивается с заданным значением g(t). На основании разности этих двух величин ε(t) = g(t) - у(t) вырабатывается регулирующее воздействие r(t). При увеличении тока нагрузки Iн поток возбуждения, создаваемый обмоткой ОУ, увеличивается и в определенной мере предотвращает падение напряжения Ur. Однако на любое другое возмущающее воздействие (в том числе на изменение частоты вращения n) эта система не реагирует.
При увеличении тока нагрузки Iн поток возбуждения, создаваемый обмоткой ОУ, увеличивается и в определенной мере предотвращает падение напряжения Ur. Однако на любое другое возмущающее воздействие (в том числе на изменение частоты вращения n) эта система не реагирует.