Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Теория автоматического управления и регулированияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Лекции Теория автоматического управления и регулирования (ЧАСТЬ 1) Содержание Введение 1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ 1.1 Основные принципы управления 1.2 Разновидности и свойства САР 1.3 Законы регулирования 1.4 Виды задающих и возмущающих воздействий 2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ САР И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ 2.1 Математическое описание элементов и систем автоматического регулирования 2.2 Передаточные функции 2.3 Структурные схемы и структурные преобразования 2.4 Структурные модели САР 3. ХАРАКТЕРИСТИКИ САР И ТИПОВЫХ ЗВЕНЬЕВ 3.1 Временные характеристики САР 3.2 Частотные характеристики САР 3.3 Разновидность типовых звеньев САР 4. УСТОЙЧИВОСТЬ И КАЧЕСТВО САР 4.1 Основные условия устойчивости 4.2 Алгебраический критерий устойчивости Гурвица 4.3 Частотный критерий устойчивости Михайлова 4.4 Частотный критерий устойчивости Найквиста 4.5 Оценки качества регулирования 4.6 Коррекция САР. регулирование устройство передаточная функция
Введение
Для того чтобы различные технические устройства и системы выполняли требуемые функции необходимо организовать тот или иной процесс управления. Процесс управления может быть реализован "ручным" способом или с помощью совокупности технических средств, которые, в общем случае, называют системами автоматического управления, Системы автоматического управления на железнодорожном транспорте призваны управлять движением поездов и перевозочным процессом. Характерная особенность этих систем заключается в необходимости обеспечения безопасности движения и высокой пропускной способности участков железных дорог. Необходимость внедрения и развитие систем автоматического управления способствовали созданию отдельного научно-технического направления, которое включает элементную базу, теоретические вопросы анализа и синтеза, вопросы проектирования и обеспечения требуемой надёжности, Вместе с тем, это отдельное направление имеет тесную связь с электроникой, электротехникой, математикой и другими разделами науки и техники, Целью данного конспекта лекций является изучение круга вопросов, которые представляют собой теории автоматического управления и регулирования. Рассматриваемые вопросы являются наиболее общими и характеризуют с единых позиций процессы, происходящие в системах автоматического управления и регулирования.
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ Основные принципы управления
Задача управления заключается в том, чтобы объект управления в условиях реальной эксплуатации обеспечивал выполнение требуемых функций. Фактическое состояние объекта управления определяется одним или несколькими рабочими параметрами y (t). Чаще всего рабочие параметры представляют собой физические величины: скорость (линейная и вращения), температура, напряжение электрического тока, линейные и угловые перемещения и т.д. В реальных условиях на объект управления оказывают влияние внешние воздействия, которые называются возмущающими z(t). Эти воздействия вызывают изменение внутреннего состояния объекта и как следствие - рабочих параметров. В связи с этим для выполнения рабочих функций по заданным алгоритмам необходимо на объект управления организовать подачу управляющих воздействий U (t) (рис 1.1).
Рис 1.1 Объект управления
Заданный алгоритм обычно предусматривает поддержание рабочего параметра постоянным во времени или же изменение во времени по известному или неизвестному закону. Задача управления, по существу, заключается в формировании такого закона изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий. Для решения этой задачи используются три фундаментальных принципа управления: разомкнутое управление, управление по возмущению (принцип компенсации) и замкнутое управление (принцип обратной связи или управление по отклонению). Структурные схемы принципов управления представлены на рис 1.2.
УУ - управляющее устройство; ОУ - объект управления; И - измеритель возмущения; К - корректирующее устройство; Рис 1.2. Основные принципы управления.
При разомкнутом принципе (рис 1.2, а) управляющее устройство вырабатывает сигнал управления U, который поступает на исполнительные элементы объекта управления. На вход управляющего устройства подается сигнал X, представляющий собой задание. Задание задается человеком или специальным задающим устройством. Данный принцип отличается простотой технической реализации, но оказывается малоэффективным при недостаточной информации о характере возмущении.
Для того чтобы учесть характер возмущений в процессе управления объектом применяют управление по возмущению (рис.1.2, б). Здесь убавляющее устройство вырабатывает сигнал управления U’ в соответствии с заданием Х. Одновременно производится измерение возмущений, действующих на объект, и производится коррекция сигнала управления U’. Полученный в результате коррекции сигнал управления U поступает на объект управления. Данный принцип является более эффективным по сравнению с разомкнутым управлением, при условии, что имеется техническая возможность измерения возмущающих воздействий. Указанное условие ограничивает применение данного принципа. Принцип замкнутого управления (рис 1.2, в) позволяет решить задачу управления при любом характере действующих возмущений. В этом случае сигнал задания поступает на один из входов элемента сравнения, на другой вход которого по цепи обратной связи подается измеренное с помощью датчиков фактическое значение рабочего параметра объекта управления. На выходе элемента сравнения имеем сигнал D (ошибку, отклонение), который является разностью между заданным и фактическим значениями параметров, т.е. D=Х - Y. Управляющее устройство в зависимости от величины и знака ошибки вырабатывает сигнал управления. Таким образом, принцип замкнутого управления учитывает не только задание, но и фактическое состояние объекта и действующих возмущений. Поэтому данный принцип является наиболее универсальным и позволяет успешно решать задачи управления, несмотря на неопределенность объекта управления и характера возмущений. Класс автоматических систем, построенных на основе принципа замкнутого управления, получил название систем автоматического регулирования (САР), Примером таких систем являются системы автоведения поезда. В этих системах на борт локомотива с помощью канала связи передается заданная скорость Vз применительно к конкретному участку. Эта скорость вычисляется специальным устройством и зависит от расстояния до впередиидущего поезда, от состояния верхнего строения пути, типа локомотива, веса состава, профиля участка и т.д. На борту локомотива производится измерение фактической скорости Vj и сравнение с заданной. Если Vз> Vj то происходит включение тяговых двигателей, в противном случае включаются тормозные средства. Свойство универсальности САР позволяет предположить, что структура замкнутого управления в неявном виде широко представлена в технике и природе. Рассмотрим динамические процессы, протекающие в элементарной RC-цепи (рис 1.3).
Рис 1.3 RC-цепь
Падение напряжения на сопротивлении R (UR) равно разности между входным напряжением U1 и выходным напряжения U2, т.е. UR=U1-U2. Напряжение UR определяет ток
Рис. 1.4 Структурная модель RC – цепи Законы регулирования
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U = f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Закон регулирования определяет основные качественные и количественные характеристики систем. Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем). Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон и регулятор в этом случае называют П- регулятором. При этом U=U0+kD, где U0-постоянная величина, k - коэффициент пропорциональности. Основным достоинством П - регулятора является простота. По существу, это есть усилитель постоянного тока о коэффициентом усиления k. Недостатки П - регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами. Интегральный закон регулирования и соответствующий И - регулятор реализует следующую зависимость: Техническая реализация И - регулятора представляет собой усилитель постоянного тока с емкостной отрицательной обратной связью. И - регуляторы обеспечивают высокую точность в установившемся режиме. Вместе с тем И - регулятор вызывает уменьшение устойчивости переходного процесса и системы в целом. Пропорционально-интегральный закон регулирования позволяет объединить положительные свойства пропорционального и интегрального законов регулирования. В этом случае ПИ - регулятор реализует зависимость:
Мощным средством улучшения поведения САР в переходном режиме является введение в закон регулирования производной от ошибки. Часто эта производная вводится в пропорциональный закон регулирования. В этом случае имеем пропорционально-дифференциальный закон регулирования, регулятор является ПD- регулятором, который реализует зависимость:
Кроме ПИ и ПД регуляторов, часто на практике используют ПИД -регуляторы, которые реализуют пропорционально–интегрально- дифференциальный закон регулирования:
Среди нелинейных законов регулирования наиболее распространены релейные законы. Существуют двухпозиционный и трехпозиционный законы регулирования. Аналитически двухпозиционный закон регулирования записывается следующим образом:
Трехпозиционный закон регулирования имеет следующий вид:
На рис 1.5. представлены в графическом виде релейные законы регулирования. При трехпозиционном законе регулирования величина DН определяет зону нечувствительности регулятора. Применение релейных законов позволяет при высоком быстродействии получить такие результаты, которые невозможно осуществить с помощью линейных законов,
Рис 1.5. Релейные законы регулирования Передаточные функции Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью САР, т.к. полностью характеризует динамические свойства системы. Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y (S) к изображению входной величины Х (S), т.е.
Учитывая условия
Поскольку для линейных систем можно применить принцип наложения, то будет справедливым выделить следующие два случая: - сигнал Z (S) = 0, тогда - сигнал X (S) = 0, тогда Тогда, для любой САР, имеющей входы по управлению и по возмущению, можно определить две передаточные функции:
Уравнение (2.9) представляет передаточную функцию по управлению, а выражение (2.10) представляет передаточную функцию по возмущению. Как известно, собственный оператор Q (p) может быть записан в следующем виде.
Соответственно оператор управляющего воздействия R1 (р) и оператор возмущающего воздействия R2 (p) выразим следующим образом:
Следовательно, передаточные функции по управлению и по возмущению представляют собой отношения следующих полиномов:
Для физической реализуемости системы необходимо выполнить условие n>m и n>k. Передаточные функции содержат особые точки на комплексной плоскости -нули и полюса. Полюса - это те значения S, при которых передаточная функция превращается в бесконечность. Для определения полюсов необходимо собственный оператор (знаменатель передаточной функции) приравнять к нулю и произвести решение алгебраического уравнения относительно S. Нули - это те значения S, при которых передаточная функция равна нулю. Для нахождения нулей числитель передаточной функции приравнивается к нулю и полученное алгебраическое уравнение решается относительно S. В связи о этим передаточная функция может быть представлена как отношение произведений элементарных сомножителей:
где li - полюса передаточной функции; nk - нули передаточной функции. Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила и метода структурных преобразований.
2.3 Структурные схемы и структурные преобразования
Обычно структурная схема САР состоит из отдельных элементов, соединенных последовательно, параллельно или с помощью обратных связей. Каждый элемент имеет один вход и один выход и заданную передаточную функцию. Существуют следующие правила структурных преобразований, позволяющие по передаточным функциям отдельных элементов определить требуемую передаточную функцию. При последовательном соединении элементов передаточные функции перемножаются. При параллельном соединении передаточные функции суммируются. Правила структурных преобразований при наличии обратных связей представлены на рис 2.2.
Рис2.2. Правила структурных преобразований при наличии обратных связей: а - положительная, б - отрицательная. Рассмотренные правила позволяют для одноконтурных структур САР получить эквивалентные передаточные функции по управлению, по возмущению, по ошибке и разомкнутой САР. Пусть задана структура одноконтурной САР в виде, представленном на рис 2.3
Рис 2.3. Структурная схема одноконтурной САР. Передаточная функция разомкнутой системы Wp (S) определяется выражением:
Передаточная функция замкнутой САР по управлению Wy(S) имеет следующий вид:
Передаточная функция замкнутой САР по возмущению определяется выражением:
Передаточная функция замкнутой САР по ошибке имеет следующий вид.
Приведенные здесь передаточные функции получены на основе применения правила последовательного соединения элементов и соединения в виде обратных связей. Если задана многоконтурная структура САР, то с помощью структурных преобразований она может быть приведена к одноконтурной. При этом используется ряд дополнительных правил, связанных с переносом элементов структурной схемы. Эти правила сведены в таблицу 2.1.
Таблица 2.1 Правила структурных преобразований
Более полный перечень правил структурных преобразований представлен в учебном пособии [1]. Найденные с помощью правил структурных преобразований передаточные функции позволяют достаточно просто определить временные и частотные характеристики и получить качественные и количественные оценки динамики и статики САР.
Структурные модели САР
В данном вопросе рассматривается аналитическая форма представления динамических САР и материализация математических понятий и аналитических приемов в виде структурных математических модулей. Это положение в значительной степени упрощает процесс технической реализации как модулей, так и реальных элементов и систем. Допустим, что САР содержит один вход X (t), один выход Y (t), и имеет передаточную функцию следующего вида:
Запишем уравнение в операторном виде, связывающее входные и выходные сигналы и соответствующее заданной передаточной функции:
Выразим уравнение (2.12) относительно старшей степени S:
Входной сигнал Y (t) можно получить путем последовательного интегрирования старшей производной Sny(t). Для этого потребуется n последовательно включенных интеграторов, сигналы на входах которых представляют собой производные от Sny (t) до Sy(t) (рис.2.3).
Рис. 2.3. Последовательное интегрирование Согласно уравнению (2.13) очевидно, что старшая производная Sny(t) равна переменной bmx (t) минус сумма выходных сигналов интеграторов, умноженных на коэффициенты а1, а2... аn. Тогда получим структурную модель, представленную на рис. 2.4.
Рис 2.4 Структурная модель САР
Введем обозначения Z1(t)=y(t), Z2(t)=S×y(t)…Zn(t)=Sn-1×y(t) и уравнение n-го порядка (2.12) запишем в виде системы n дифференциальных уравнений первого порядка:
Система уравнений (2.14) является одной из форм представления динамических процессов структурной модели, изображенной на рис. 2.4. В матричной форме система уравнений (2.14) имеет вид:
В сокращенном виде матричная форма записывается следующим образом:
где A – квадратная матрица размером n ´ n; b - Структурная математическая модель динамических процессов САР обладает рядом преимуществ перед аналитическими описаниями или передаточными функциями. Во-первых, структурная модель дает ясное и наглядное представление понятию "состояние систем", как совокупность сигналов на выходах интеграторов. Во-вторых, однозначно представляется структура взаимодействий между переменными в виде системы с обратными связями, которые и определяют протекание динамических процессов. Одновременно структурные модели оказывают помощь при моделировании САР на аналоговых или цифровых вычислительных машинах.
Таблица 3.3 Частотные характеристики звеньев
В табл. 3.2 и 3.3 указаны лишь характеристики основных типовых звеньев. Кроме того существуют интегро-дифференцирующие звенья и неминимально-фазовые звенья. Интегро-дифференцирующие звенья имеют передаточные функции вида:
Где k-постоянный коэффициент R(S) и Q(S)- полиномы от S первого или второго порядков. К неминимально-фазовым звеньям относятся неустойчивые звенья, передаточные функции которые имеют хотя 6ы один положительный полюс. Неминимально-фазовыми являются также звенья, которые имеют бесконечное число полюсов в левой части комплексной плоскости. Эти звенья известны под названием звенья чистого запаздывания.
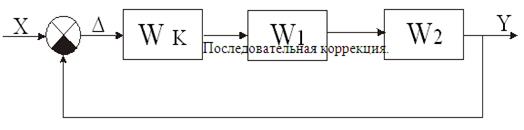
УСТОЙЧИВОСТЬ И КАЧЕСТВО САР Коррекция САР В тех случаях, когда устойчивость и необходимые качества не могут быть достигнуты путем изменения параметров системы (коэффициентов передачи, постоянных времени), то применяется коррекция. Коррекция представляет собой введение в систему дополнительных элементов, называемых корректирующими. Корректирующие элементы (устройства) могут быть включены в структуру САР различными способами. Корректирующее устройство может быть включено в пряную цепь последовательно (рис 4.2.).
Рис 4.2. Последовательная коррекция. Последовательное корректирующее устройства обычно применяют в тех случаях, когда сигнал управления представляет собой напряжение постоянного тока. Корректирующие устройства обычно выполняются в виде пассивных или активных электрических четырехполюсников постоянного тока. Если корректирующее устройство вводит производную от сигнала рассогласования D, то происходит увеличение запаса устойчивости и повышение качества переходного процесса. При введение интеграла и производной от сигнала рассогласования обеспечивается астатизм в сочетании с сохранением устойчивости и качества переходной характеристики. Применяется также включение корректирующего устройства в виде обратной связи (рис. 4.З.)
Рис. 4.3. Коррекция в виде обратной связи
Обычно параметры корректирующего устройства выбирают таким образом, чтобы выполнялось соотношение:
В этом случае свойства участка цепи, где включена коррекция и изменение её параметров не оказывают влияния на свойства всей системы. Это важное свойство является причиной широкого применения коррекции в виде обратной связи. Обратная связь здесь обычно является отрицательной. Применяется третий способ коррекции - параллельный (рис 4.4) Параллельная коррекция имеет меньшие возможности, чем две предыдущих разновидности. Вместе с тем, параллельное корректирующее устройство при меньшей сложности обеспечивает нужное преобразование сигнала рассогласования.
Рис. 4.4 Параллельная коррекция
Выбор параметров корректирующих устройств производится исходя из критериев устойчивости и проверяется по оценкам качества переходных процессов.
Список литературы
1. Теория автоматического управления. /Под ред. Воронова А.А.-М.; Высш.шк., 1986—-367 с. 2. Макаров И.М., Менский Б.М. Линейные автоматические системы.-М.: Машиностроение, 1982.-505 с. 3. Ящугин В.А Теория линейных непрерывных систем автоматического управления в вопросах и ответах.-М.: Высш. шк., 1986.-224 с. 4. Сборник задач со теории автоматического регулирования я управления. /Под ред. Бесекероского В.А. –М.: Наука, 1978.-510 с.
Лекции Теория автоматического управления и регулирования (ЧАСТЬ 1) Содержание Введение 1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ 1.1 Основные принципы управления 1.2 Разновидности и свойства САР 1.3 Законы регулирования 1.4 Виды задающих и возмущающих воздействий 2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ САР И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ 2.1 Математическое описание элементов и систем автоматического регулирования 2.2 Передаточные функции 2.3 Структурные схемы и структурные преобразования 2.4 Структурные модели САР 3. ХАРАКТЕРИСТИКИ САР И ТИПОВЫХ ЗВЕНЬЕВ 3.1 Временные характеристики САР 3.2 Частотные характеристики САР 3.3 Разновидность типовых звеньев САР 4. УСТОЙЧИВОСТЬ И КАЧЕСТВО САР 4.1 Основные условия устойчивости 4.2 Алгебраический критерий устойчивости Гурвица 4.3 Частотный критерий устойчивости Михайлова 4.4 Частотный критерий устойчивости Найквиста 4.5 Оценки качества регулирования 4.6 Коррекция САР. регулирование устройство передаточная функция
Введение
Для того чтобы различные технические устройства и системы выполняли требуемые функции необходимо организовать тот или иной процесс управления. Процесс управления может быть реализован "ручным" способом или с помощью совокупности технических средств, которые, в общем случае, называют системами автоматического управления, Системы автоматического управления на железнодорожном транспорте призваны управлять движением поездов и перевозочным процессом. Характерная особенность этих систем заключается в необходимости обеспечения безопасности движения и высокой пропускной способности участков железных дорог. Необходимость внедрения и развитие систем автоматического управления способствовали созданию отдельного научно-технического направления, которое включает элементную базу, теоретические вопросы анализа и синтеза, вопросы проектирования и обеспечения требуемой надёжности, Вместе с тем, это отдельное направление имеет тесную связь с электроникой, электротехникой, математикой и другими разделами науки и техники, Целью данного конспекта лекций является изучение круга вопросов, которые представляют собой теории автоматического управления и регулирования. Рассматриваемые вопросы являются наиболее общими и характеризуют с единых позиций процессы, происходящие в системах автоматического управления и регулирования.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1932; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.254.100 (0.015 с.) |




 , от которого зависит заряд ёмкости,
, от которого зависит заряд ёмкости,  .
.  Напряжение на конденсаторе U2 определяется его зарядом,
Напряжение на конденсаторе U2 определяется его зарядом,  . Таким образом, можно выделить внутреннею обратную связь, определяющую зависимость тока i (t) не только от входного напряжения U1, но и от напряжения U2, до которого зарядилась ёмкость под действием тока i (t). В результате получим структуру, представленную на рис 1.4.
. Таким образом, можно выделить внутреннею обратную связь, определяющую зависимость тока i (t) не только от входного напряжения U1, но и от напряжения U2, до которого зарядилась ёмкость под действием тока i (t). В результате получим структуру, представленную на рис 1.4.
 , где Т -постоянная времени интегрирования.
, где Т -постоянная времени интегрирования.





 для линейных систем уравнение (2.3) запишем в следующем виде:
для линейных систем уравнение (2.3) запишем в следующем виде: (2.8)
(2.8)














 Перенос сумматора через элемент
Перенос сумматора через элемент



 Вынос точки разветвления из параллельного соединения
Вынос точки разветвления из параллельного соединения



 Вынос точки разветвления из контура обратной связи
Вынос точки разветвления из контура обратной связи


 (2.13)
(2.13)

 (2.14)
(2.14)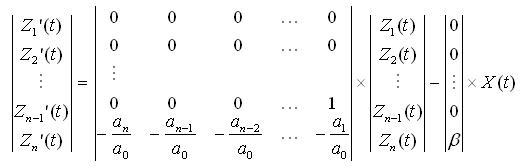

 n-мерный вектор состояния;
n-мерный вектор состояния; - вектор-столбец управления.
- вектор-столбец управления.