
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическое описание элементов и систем автоматического регулированияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
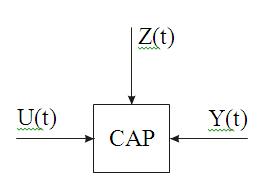
Поведение САР в процессе функционирования представляет собой сочетание статических и динамических режимов. Для проведения теоретических исследований САР и её отдельных элементов необходимо иметь уравнения, описывающие их поведение при изменяющихся внешних воздействиях. Эти уравнения представляют собой выраженные в математической форме соотношения, связывающие входные и выходные сигналы и воздействия. С целью упрощения получения математических соотношений обычно вводят следующие допущения: - САР и ее элементы обладают свойством стационарности; - элементы САР являются линейными; - протекающие процессы являются непрерывными функциями времени при выполнении нулевых начальных условий. В обобщенном виде САР представлена на рис. 2.1.
Рис 2.1 Система автоматического регулирования Здесь X и Z являются входными воздействиями, а Y – выходным параметром. В общем случае действие непрерывной линейной САР описывается неоднородным дифференциальным уравнением следующего вида:
где a, b, c - постоянные коэффициенты, зависящие от параметров системы. Введем оператор дифференцирования
В выражении (2.2) полином, стоящий при выходном параметре Y, называется собственным оператором и обозначается Q(p). Полиномы при воздействиях Х и Z называются соответственно оператором управляющего воздействия и оператором возмущающего воздействия. Оператор управляющего воздействия обозначим R1(p), а оператор возмущающего воздействия обозначим R2(p). С учётом введенных обозначений уравнение (2.2) примет вид:
Если рассматривается только установившейся режим, то уравнение (2.2) примет вид:
Таким образом, уравнение (2.2) описывает как динамику, так и статику САР, а уравнение (2.4) описывает только статику. В тех случаях, когда система или её составной элемент описывается дифференциальным уравнением не выше 2-го порядка, применяется стандартная форма записи уравнения. Например, имеем САР, содержащую один вход X и один выход Y, которая описывается уравнением:
В уравнении (2.7) параметр Т1 имеет размерность сек-2, параметр Т2 –сек-1, а параметр К является безразмерным. Выражение (2.7) представляет собой уравнение в стандартной форме, которая является наиболее удобной при дальнейшем анализе динамических процессов. В этом случае собственный оператор Q(p) принимает вид алгебраического уравнения:
Следует отметить, что используемый ваше оператор дифференцирования p имеет тесную связь с оператором интегрального преобразования Лапласа S, который является комплексной величиной. Как известно, для линейных дифференциальных уравненийс постоянными параметрами при нулевых начальных условиях и точностью до обозначения оператор p соответствует оператору S, т.е. Напомним, что для отображения Функции f(t) действительной переменной t на комплексной плоскости в виде функции комплексной переменной f(S) выполняется следующим образом:
где S=a+jb При этом f (t) называют оригиналом, а f(S) – изображением. Полагают, что функция f (t) обладает следующими свойствами: - f (t) определена и кусочно - дифференцируема на всей положительной числовой полуоси(0 - ¥); - f (t)=0 при t<0; -существуют такие положительные числа M и С, при которых выполняется соотношение:
Переход от изображения f(S) к оригиналу f(t) (обратное преобразование Лапласа) выполняется следующим образом:
Здесь интегрирование производится вдоль любой прямой, которая удовлетворяет условию Re(S)=a0>С. Символически обратное преобразование Лапласа обозначается в виде:
Передаточные функции Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью САР, т.к. полностью характеризует динамические свойства системы. Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y (S) к изображению входной величины Х (S), т.е.
Учитывая условия
Поскольку для линейных систем можно применить принцип наложения, то будет справедливым выделить следующие два случая: - сигнал Z (S) = 0, тогда - сигнал X (S) = 0, тогда Тогда, для любой САР, имеющей входы по управлению и по возмущению, можно определить две передаточные функции:
Уравнение (2.9) представляет передаточную функцию по управлению, а выражение (2.10) представляет передаточную функцию по возмущению. Как известно, собственный оператор Q (p) может быть записан в следующем виде.
Соответственно оператор управляющего воздействия R1 (р) и оператор возмущающего воздействия R2 (p) выразим следующим образом:
Следовательно, передаточные функции по управлению и по возмущению представляют собой отношения следующих полиномов:
Для физической реализуемости системы необходимо выполнить условие n>m и n>k. Передаточные функции содержат особые точки на комплексной плоскости -нули и полюса. Полюса - это те значения S, при которых передаточная функция превращается в бесконечность. Для определения полюсов необходимо собственный оператор (знаменатель передаточной функции) приравнять к нулю и произвести решение алгебраического уравнения относительно S. Нули - это те значения S, при которых передаточная функция равна нулю. Для нахождения нулей числитель передаточной функции приравнивается к нулю и полученное алгебраическое уравнение решается относительно S. В связи о этим передаточная функция может быть представлена как отношение произведений элементарных сомножителей:
где li - полюса передаточной функции; nk - нули передаточной функции. Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила и метода структурных преобразований.
2.3 Структурные схемы и структурные преобразования
Обычно структурная схема САР состоит из отдельных элементов, соединенных последовательно, параллельно или с помощью обратных связей. Каждый элемент имеет один вход и один выход и заданную передаточную функцию. Существуют следующие правила структурных преобразований, позволяющие по передаточным функциям отдельных элементов определить требуемую передаточную функцию. При последовательном соединении элементов передаточные функции перемножаются. При параллельном соединении передаточные функции суммируются. Правила структурных преобразований при наличии обратных связей представлены на рис 2.2.
Рис2.2. Правила структурных преобразований при наличии обратных связей: а - положительная, б - отрицательная. Рассмотренные правила позволяют для одноконтурных структур САР получить эквивалентные передаточные функции по управлению, по возмущению, по ошибке и разомкнутой САР. Пусть задана структура одноконтурной САР в виде, представленном на рис 2.3
Рис 2.3. Структурная схема одноконтурной САР. Передаточная функция разомкнутой системы Wp (S) определяется выражением:
Передаточная функция замкнутой САР по управлению Wy(S) имеет следующий вид:
Передаточная функция замкнутой САР по возмущению определяется выражением:
Передаточная функция замкнутой САР по ошибке имеет следующий вид.
Приведенные здесь передаточные функции получены на основе применения правила последовательного соединения элементов и соединения в виде обратных связей. Если задана многоконтурная структура САР, то с помощью структурных преобразований она может быть приведена к одноконтурной. При этом используется ряд дополнительных правил, связанных с переносом элементов структурной схемы. Эти правила сведены в таблицу 2.1.
Таблица 2.1 Правила структурных преобразований
Более полный перечень правил структурных преобразований представлен в учебном пособии [1]. Найденные с помощью правил структурных преобразований передаточные функции позволяют достаточно просто определить временные и частотные характеристики и получить качественные и количественные оценки динамики и статики САР.
Структурные модели САР
В данном вопросе рассматривается аналитическая форма представления динамических САР и материализация математических понятий и аналитических приемов в виде структурных математических модулей. Это положение в значительной степени упрощает процесс технической реализации как модулей, так и реальных элементов и систем. Допустим, что САР содержит один вход X (t), один выход Y (t), и имеет передаточную функцию следующего вида:
Запишем уравнение в операторном виде, связывающее входные и выходные сигналы и соответствующее заданной передаточной функции:
Выразим уравнение (2.12) относительно старшей степени S:
Входной сигнал Y (t) можно получить путем последовательного интегрирования старшей производной Sny(t). Для этого потребуется n последовательно включенных интеграторов, сигналы на входах которых представляют собой производные от Sny (t) до Sy(t) (рис.2.3).
Рис. 2.3. Последовательное интегрирование Согласно уравнению (2.13) очевидно, что старшая производная Sny(t) равна переменной bmx (t) минус сумма выходных сигналов интеграторов, умноженных на коэффициенты а1, а2... аn. Тогда получим структурную модель, представленную на рис. 2.4.
Рис 2.4 Структурная модель САР
Введем обозначения Z1(t)=y(t), Z2(t)=S×y(t)…Zn(t)=Sn-1×y(t) и уравнение n-го порядка (2.12) запишем в виде системы n дифференциальных уравнений первого порядка:
Система уравнений (2.14) является одной из форм представления динамических процессов структурной модели, изображенной на рис. 2.4. В матричной форме система уравнений (2.14) имеет вид:
В сокращенном виде матричная форма записывается следующим образом:
где A – квадратная матрица размером n ´ n; b - Структурная математическая модель динамических процессов САР обладает рядом преимуществ перед аналитическими описаниями или передаточными функциями. Во-первых, структурная модель дает ясное и наглядное представление понятию "состояние систем", как совокупность сигналов на выходах интеграторов. Во-вторых, однозначно представляется структура взаимодействий между переменными в виде системы с обратными связями, которые и определяют протекание динамических процессов. Одновременно структурные модели оказывают помощь при моделировании САР на аналоговых или цифровых вычислительных машинах.
|
||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 815; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.38 (0.008 с.) |

 (2.1)
(2.1) . Тогда уравнение (2.1) может быть представлено в операторном виде:
. Тогда уравнение (2.1) может быть представлено в операторном виде: (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4)

 Это обстоятельство позволяет использовать для решения уравнений типа (2.1), а также для моделирования САР интегральное преобразование Лапласа.
Это обстоятельство позволяет использовать для решения уравнений типа (2.1), а также для моделирования САР интегральное преобразование Лапласа.




 (2.8)
(2.8)














 Перенос сумматора через элемент
Перенос сумматора через элемент



 Вынос точки разветвления из параллельного соединения
Вынос точки разветвления из параллельного соединения



 Вынос точки разветвления из контура обратной связи
Вынос точки разветвления из контура обратной связи


 (2.13)
(2.13)

 (2.14)
(2.14)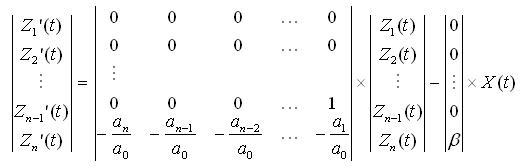

 n-мерный вектор состояния;
n-мерный вектор состояния; - вектор-столбец управления.
- вектор-столбец управления.


