
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез систем автоматического управленияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Синтез систем автоматического управления
Учебно-практическое пособие по дисциплине «Теория автоматического управления»
Составитель: В.И.Будин УДК 681.51 Синтез систем автоматического управления: Учебно-практическое пособие/ Филиал Самар. гос. техн. ун-та в г. Сызрани; Сост. В.И. Будин. Сызрань, 2011. 51 с.
Изложены основные вопросы синтеза систем автоматического управления с применением логарифмических частотных характеристик и методики последовательной коррекции с подчиненным регулированием координат. Даны рекомендации по использованию пакета прикладных программ Control System Toolbox на всех этапах проектирования. Пособие предназначено для студентов всех форм обучения специальности «Электропривод и автоматика промышленных установок и технологических комплексов» и направлений подготовки бакалавров «Электроэнергетика и электротехника» и «Автоматизация технологических процессов и производств» при выполнении курсового проекта по дисциплине «Теория автоматического управления».
Табл. 6. Ил. 18. Библиогр.: 3 назв.
Утверждено научно-методическим советом электротехнического факультета от 11 февраля 2011 г.
СОДЕРЖАНИЕ
1. Введение………………………………………………………..4 2. Техническое задание…………………………………………..6 3. Цель, содержание и объем курсовой работы…………….....13 4. Построение структурной схемы исходной системы……….14 5. Определение передаточных функций звеньев САУ……….15 6. Исследование исходной системы………………………..….21 7. Коррекция системы автоматического управления….…….28 8. Реализация регуляторов……………………………………...42 9. Анализ скорректированной системы……………………….50 10. Построение функционально-принципиальной схемы скорректированной САУ…………………………………….50 11. Заключение…………………………………………………...51 12. Библиографический список………………………………….51 Список использованной литературы…………………………….51
Введение
Задача синтеза системы автоматического управления (САУ) заключается в выборе такой ее структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе. Обычно определенная часть проектируемой системы задана. Она является исходной или нескорректированной САУ. Параметры ее основных функциональных элементов известны. В такой постановке задача проектирования сводится к определению управляющего устройства (УУ), обеспечивающего заданные показатели качества системы. Наиболее простым, наглядным и хорошо разработанным инженерным методом синтеза САУ является метод логарифмических частотных характеристик (ЛЧХ). Его идея основана на однозначной связи между переходным процессом в системе и ее ЛЧХ. Исходя из этого по заданным точностным и динамическим показателям качества сначала строится желаемая ЛЧХ, а затем путем графического построения осуществляется приближение к ней частотных характеристик исходной системы. В результате такой процедуры определяется ЛЧХ управляющего устройства. Корректирующее устройство может включаться в канал управления последовательно или встречно-параллельно. Вид коррекции предопределяет некоторые особенности синтеза, обусловленные методикой получения ЛЧХ устройства управления. Проектирование САУ с применением ЛЧХ обеспечивает наиболее широкие возможности удовлетворения противоречивых требований к статическим и динамическим свойствам системы управления. Однако имеется существенное практическое ограничение в применении данного метода синтеза. Оно предопределяется, как правило, сложностью получаемой математической модели УУ и соответственно связано с трудностью реализации этой коррекции и её настройки в реальной САУ. Для упрощения вида УУ в настоящее время оно разбивается на ряд корректирующих устройств (КУ) путем организации в САУ внутренних вложенных друг в друга контуров, каждый из которых управляется соответствующим регулирующим устройством (регулятором). Для расчета внутренних контуров целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат. В её основе лежит настройка контуров по быстродействию на так называемый модульный оптимум [2]. В результате получаются обычно простейшие КУ в виде типовых промышленных регуляторов (ПИД, ПИ и т.д.). Такие регуляторы удобны в настройке и эксплуатации. Последний (главный) контур синтезируется с помощью выше упомянутого классического метода ЛЧХ. Благодаря перераспределению коррекции по всем контурам, регулятор основного (внешнего) контура также получается в виде простого легко настраиваемого активного или пассивного фильтра. В настоящее время при проектировании и исследовании САУ широко используются специальные программно- вычислительные системы. Наиболее применяемой в области автоматики является среда MatLab с рядом своих приложений, в особенности, таких как Control System Toolbox и Simulink [3]. Их использование значительно упрощает все рутинные расчеты и исключает вычислительные ошибки. Поэтому данные пакеты расширения MatLab следует использовать на всех этапах проектирования, где это целесообразно. В рамках курсового проектирования осуществляется синтез САУ согласно заданию кафедры, которая определяет как содержание, так и объем курсовой работы (КР). Решаемые при этом задачи преследуют учебные цели, которые в основном сориентированы на закрепление и расширение знаний студентов по теории автоматического управления, развитие навыков самостоятельной работы с технической литературой, практическое применение современных инженерных методов, в том числе ЭВМ, при разработке и исследовании реальных САУ. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез САУ. К ним относятся сведения о принципе действия нескорректированной системы, ее функциональная схема, параметры всех звеньев САУ, показатели качества проектируемой системы. Кроме того, могут быть предъявлены некоторые другие требования, которые вводятся для индивидуализации содержания КР. Варианты заданий распределяются и утверждаются кафедрой.
Задание 1. Синтез следящей системы Исходная нескорректированная система представлена на рис. 2.1. Варианты задания приведены в табл. 2.1.
Рис. 2.1. Следящий электропривод на основе системы ЭМУ-Д
В функциональной схеме следящего электропривода обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, СД – сельсин-датчик, СП – сельсин-приемник, ФЧВ – фазочувствительный выпрямитель, УПТ – усилитель постоянного тока, АД – асинхронный двигатель, Р – редуктор, ОУ – объект управления. Задающим воздействием в этой схеме является угол поворота ротора сельсина-датчика β, регулируемой координатой − угол поворота выходного вала редуктора α, который измеряется сельсином-приемником. Пара СД и СП включены по трансформаторной схеме, которая позволяет формировать сигнал рассогласования (переменное напряжение UС), пропорциональный ошибке слежения Постоянное напряжение UВ усиливается УПТ и подается в прямую и обратную обмотки управления ЭМУ в соответствие со знаком UВ. Электромашинный усилитель выполняет роль усилителя мощности. По существу – это двухкаскадный генератор постоянного напряжения, который приводится в движение от асинхронного двигателя. Последний питается от трехфазной сети и вращается с некоторой постоянной скоростью. Напряжение на выходе электромашинного усилителя UД пропорционально напряжению, подаваемому в обмотку управления UУ. Под действием напряжения UД двигатель вращается с определенной скоростью в прямом или обратном направлении в зависимости от знака UД. Редуктор Р в следящих системах обычно существенно понижает обороты, т.е. его коэффициент передачи значительно меньше единицы. В данной системе объектом управления по существу является двигатель с редуктором, т.к. обратная связь организована по положению вала Р. Однако с учетом того, что ОУ жестко связан с валом Р можно считать, что объектом управления является система Д - ОУ. Работает САУ следующим образом. Если угол поворота Таблица 2.1
ле Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения. Задание 2. Синтез следящей системы Исходная нескорректированная система представлена на рис. 2.2. Варианты задания приведены в табл. 2.2.
Рис. 2.2. Следящий электропривод на основе системы ЭМУ-Г-Д
Данная САУ отличается от следящей системы, приведенной рис. 2.1, наличием в канале управления генератора постоянного напряжения Г со своим приводным двигателем. Совместно с ЭМУ он выполняет роль усилителя мощности. Работает эта система так же, как и следящий электропривод, построенный на основе системы ЭМУ-Д.
Таблица 2.2
Задание 3. Синтез следящей системы
Исходная нескорректированная система приведена на рис. 2.3, варианты задания − в табл. 2.3.
Рис. 2.3. Следящий электропривод на основе системы П-Д
Эта САУ по принципу действия не отличается от схемы, приведенной на рис. 2.1. Преобразователь П реально представляет собой тиристорный преобразователь, который выполняет функции усилителя мощности.
Таблица 2.3
Выполнение курсовой работы является заключительным этапом обучения студентов по дисциплине «Теория автоматического управления» и имеет своей целью систематизацию, закрепление и расширение теоретических знаний и практических навыков самостоятельной работы с технической литературой и приобретение творческих навыков при решении технических задач. Анализ исходных данных на проектирование и предлагаемых во Введении подходов синтеза САУ позволяет выделить следующие основные этапы проектирования: Ø Построение структурной схемы нескорректированной системы и определение передаточных функций ее звеньев. Ø Определение показателей качества исходной системы, в том числе, оценка точности, запаса устойчивости и быстродействия. Ø Синтез внутренних контуров САУ методом последовательной коррекции с подчиненным регулированием координат. Ø Синтез основного контура регулирования с использованием логарифмических частотных характеристик. На этом этапе обычно решаются три задачи: - построение желаемой логарифмической амплитудно-частотной характеристики; - оценка точности и динамических показателей качества желаемой системы; - определение передаточной функции (ПФ) последовательного корректирующего устройства (фильтра). Ø Реализация корректирующих устройств (регуляторов) всех контуров САУ в виде активных и пассивных фильтров. Ø Оценка качества скорректированной системы. Ø Построение функциональной схемы скорректированной системы. Курсовая работа состоит из расчетно-пояснительной записки (РПЗ) объемом 23-25 листов формата А4 (с иллюстрациями). РПЗ должна содержать обоснование принятых решений, соответствующие расчеты на всех этапах проектирования, заключение по результатам проделанной работы, в том числе о соответствии полученных показателей качества САУ техническому заданию.
РЕАЛИЗАЦИЯ РЕГУЛЯТОРОВ Корректирующие устройства (регуляторы) можно реализовать как на пассивных четырехполюсниках, так и в виде активных фильтров. Последние функционально удобнее, т.к. построены на базе операционных усилителей, которые позволяют организовывать операции вычитания и сложения аналоговых сигналов. Кроме того в отличие от пассивных цепей активные фильтры обладают усилительными свойствами. На их основе легко реализовывать типовые промышленные законы управления (ПИ, ПИД и т.п.). И ещё одно достоинство – все регуляторы, построенные на основе операционных усилителей, можно соединять между собой непосредственно без специальных согласующих устройств и располагать на одной плате, которую обычно называют платой регуляторов. В связи с этим в курсовой работе предлагается использовать активную коррекцию на базе операционных усилителей. Наиболее часто применяемые корректирующие фильтры представлены в табл. 8.1. На их основе можно реализовывать более сложные схемы путем их параллельного и последовательного соединения. Рассмотрим методику реализации всех регуляторов, полученных в процессе коррекции следящей системы. Передаточная функция РН была получена ранее в следующем виде:
Из данного выражения следует, что для реализации этого закона управления (ПИД-регулирование) необходимы усилитель, интегратор, дифференциатор и сумматор. Наиболее часто используемые типовые активные фильтры представлены в табл. 8.1. На их основе (фильтры 1, 2, 3, 7) можно построить ПИД - регулятор в виде схемы, приведенной на рис. 8.1. Для расчета параметров данной функциональной схемы используются следующие тривиальные соотношения:
Таблица 8.1
Продолжение таблицы 8.1.
Все эти соотношения имеют два неизвестных параметра, поэтому одним необходимо задаваться. При этом величины конденсаторов (ёмкостей) исходя из-за массо-габаритных ограничений не должны превышать 10 мкФ, а резисторы (сопротивления) желательно брать в диапазоне 102 – 106 Ом с использованием шкалы номинальных величин класса 1 (разброс ±5%), приведенной в табл. 8.2. Согласно этой шкале, например, с коэффициентом 1.3 изготавливаются резисторы 13 Ом, 130 Ом, 1.3 кОм, 13 кОм, 130 КОм,1.3 МОм.
Рис. 8.1. Схема реализации ПИД – регулятора
Таблица 8.2
Пусть сопротивления R 1, R 3 и R 4 равны соотношениям: R 1= 3 кОм; R 3= 3.9 кОм; R 4= 560 кОм.
В результате получим
В виду того, что операции усиления или деления на основе сумматора реализовывать не требуется, возьмем все сопротивления одинаковыми R 0=10 кОм. Аналогично реализуется регулятор скорости РС с ПИД – законом управления. Между выходом РС и входом РН следует установить дополнительный сумматор для реализации операции вычитания
Рис. 8.2. Схема организации по напряжению обратной связи
На входе РС также необходимо установить сумматор для организации обратной связи (рис. 8.3).
Рис. 8.3. Схема реализации обратной связи по скорости
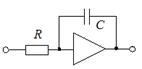
В качестве корректирующего фильтра основного контура регулирования можно взять из табл. 8.1. схему № 5 (рис. 8.4).
Рис. 8.4. Схема реализации регулятора положения
Её передаточная функция равна
Используя полученную ранее ПФ
можно записать следующее соотношение для расчета параметров РП:
Задаваясь сопротивлением R 6 = 51 кОм, получим R 5 = R 6·234.29»1.2 МОм, С 4= 0.32 / R 6 = 0.32/51000» 6.3 мФ, С 5= 1.13/ R 5» 1.13/(1.2·10 6 )» 0.94 мкФ.
В заключение все регуляторы целесообразно объединить в одну схему – управляющее устройство (УУ) (рис. 8.5). Параметры этой схемы (сопротивления и емкости) следует перенумеровать по принятым в электронных схемах правилам: слева - направо, сверху – вниз, как это показано на рис. 8.5. Спецификация элементов УУ приводится в виде табл. 8.3. На этом этап реализации заканчивается.
Таблица 8.3
Рис. 8.5. Функциональная схема УУ следящей системы ПОСТРОЕНИЕ ЗАКЛЮЧЕНИЕ
В заключении необходимо привести основные результаты работы, в том числе полученные показатели качества спроектированной системы и выводы о их соответствии заданным показателям на проектирование. Кроме того приветствуется предложения о дополнительных мерах по повышению качества спроектированной САУ. Можно дать оценку влияния ограничений координат САУ (величины напряжений и т.п.) на качество системы.
В библиографический список включается вся учебная, научная и справочная литература, которая была использована при проектировании.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления: Учебное пособие. 3-е изд., доп. и перераб. – СПб.: Издательство «Лань», 2010. – 224 с.: ил. 2. Первозванский А.А. Курс теории автоматического управления: учебное пособие для вузов. – 2-е изд., стер. – СПб.: Издательство «Лань», 2010. – 624 с.: ил. 3. Теория автоматического управления: учеб. для вузов/ под ред. проф. В.Б. Яковлева. – 3-е изд., стер. – М.: Высш. шк., 2009. – 567 с.: ил.
Синтез систем автоматического управления
Учебно-практическое пособие по дисциплине «Теория автоматического управления»
Составитель: В.И.Будин УДК 681.51 Синтез систем автоматического управления: Учебно-практическое пособие/ Филиал Самар. гос. техн. ун-та в г. Сызрани; Сост. В.И. Будин. Сызрань, 2011. 51 с.
Изложены основные вопросы синтеза систем автоматического управления с применением логарифмических частотных характеристик и методики последовательной коррекции с подчиненным регулированием координат. Даны рекомендации по использованию пакета прикладных программ Control System Toolbox на всех этапах проектирования. Пособие предназначено для студентов всех форм обучения специальности «Электропривод и автоматика промышленных установок и технологических комплексов» и направлений подготовки бакалавров «Электроэнергетика и электротехника» и «Автоматизация технологических процессов и производств» при выполнении курсового проекта по дисциплине «Теория автоматического управления».
Табл. 6. Ил. 18. Библиогр.: 3 назв.
Утверждено научно-методическим советом электротехнического факультета от 11 февраля 2011 г.
СОДЕРЖАНИЕ
1. Введение………………………………………………………..4 2. Техническое задание…………………………………………..6 3. Цель, содержание и объем курсовой работы…………….....13 4. Построение структурной схемы исходной системы……….14 5. Определение передаточных функций звеньев САУ……….15 6. Исследование исходной системы………………………..….21 7. Коррекция системы автоматического управления….…….28 8. Реализация регуляторов……………………………………...42 9. Анализ скорректированной системы……………………….50 10. Построение функционально-принципиальной схемы скорректированной САУ…………………………………….50 11. Заключение…………………………………………………...51 12. Библиографический список………………………………….51 Список использованной литературы…………………………….51
Введение
Задача синтеза системы автоматического управления (САУ) заключается в выборе такой ее структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе. Обычно определенная часть проектируемой системы задана. Она является исходной или нескорректированной САУ. Параметры ее основных функциональных элементов известны. В такой постановке задача проектирования сводится к определению управляющего устройства (УУ), обеспечивающего заданные показатели качества системы. Наиболее простым, наглядным и хорошо разработанным инженерным методом синтеза САУ является метод логарифмических частотных характеристик (ЛЧХ). Его идея основана на однозначной связи между переходным процессом в системе и ее ЛЧХ. Исходя из этого по заданным точностным и динамическим показателям качества сначала строится желаемая ЛЧХ, а затем путем графического построения осуществляется приближение к ней частотных характеристик исходной системы. В результате такой процедуры определяется ЛЧХ управляющего устройства. Корректирующее устройство может включаться в канал управления последовательно или встречно-параллельно. Вид коррекции предопределяет некоторые особенности синтеза, обусловленные методикой получения ЛЧХ устройства управления. Проектирование САУ с применением ЛЧХ обеспечивает наиболее широкие возможности удовлетворения противоречивых требований к статическим и динамическим свойствам системы управления. Однако имеется существенное практическое ограничение в применении данного метода синтеза. Оно предопределяется, как правило, сложностью получаемой математической модели УУ и соответственно связано с трудностью реализации этой коррекции и её настройки в реальной САУ. Для упрощения вида УУ в настоящее время оно разбивается на ряд корректирующих устройств (КУ) путем организации в САУ внутренних вложенных друг в друга контуров, каждый из которых управляется соответствующим регулирующим устройством (регулятором). Для расчета внутренних контуров целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат. В её основе лежит настройка контуров по быстродействию на так называемый модульный оптимум [2]. В результате получаются обычно простейшие КУ в виде типовых промышленных регуляторов (ПИД, ПИ и т.д.). Такие регуляторы удобны в настройке и эксплуатации. Последний (главный) контур синтезируется с помощью выше упомянутого классического метода ЛЧХ. Благодаря перераспределению коррекции по всем контурам, регулятор основного (внешнего) контура также получается в виде простого легко настраиваемого активного или пассивного фильтра. В настоящее время при проектировании и исследовании САУ широко используются специальные программно- вычислительные системы. Наиболее применяемой в области автоматики является среда MatLab с рядом своих приложений, в особенности, таких как Control System Toolbox и Simulink [3]. Их использование значительно упрощает все рутинные расчеты и исключает вычислительные ошибки. Поэтому данные пакеты расширения MatLab следует использовать на всех этапах проектирования, где это целесообразно. В рамках курсового проектирования осуществляется синтез САУ согласно заданию кафедры, которая определяет как содержание, так и объем курсовой работы (КР). Решаемые при этом задачи преследуют учебные цели, которые в основном сориентированы на закрепление и расширение знаний студентов по теории автоматического управления, развитие навыков самостоятельной работы с технической литературой, практическое применение современных инженерных методов, в том числе ЭВМ, при разработке и исследовании реальных САУ. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез САУ. К ним относятся сведения о принципе действия нескорректированной системы, ее функциональная схема, параметры всех звеньев САУ, показатели качества проектируемой системы. Кроме того, могут быть предъявлены некоторые другие требования, которые вводятся для индивидуализации содержания КР. Варианты заданий распределяются и утверждаются кафедрой.
Задание 1. Синтез следящей системы Исходная нескорректированная система представлена на рис. 2.1. Варианты задания приведены в табл. 2.1.
Рис. 2.1. Следящий электропривод на основе системы ЭМУ-Д
В функциональной схеме следящего электропривода обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, СД – сельсин-датчи
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 778; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.108 (0.01 с.) |

 Сызрань 2011
Сызрань 2011


 . Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
. Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ. не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование
не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование  , с
, с




















 кОм,
кОм, мкФ;
мкФ; мкФ.
мкФ. (рис. 8.2), где
(рис. 8.2), где  - задающее напряжение, UН – напряжение обратной связи.
- задающее напряжение, UН – напряжение обратной связи.


 .
. ,
, ,
,  ,
,  .
.



