
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез основного контура управленияСодержание книги Поиск на нашем сайте
Структурная схема контура положения представлена на рис. 7.5. Здесь
где
Рис. 7.5. Структурная схема контура положения
Синтез регулятора положения РП рекомендуется осуществлять с применением ЛЧХ. В основе этого подхода лежит процедура построения желаемой ЛАЧХ по исходным данным на проектирование. Однако сначала целесообразно построить ЛАЧХ нескорректированного разомкнутого контура положения, чтобы оценить частотный диапазон работы системы. Его ПФ равна
где
ЛАЧХ желательно строить на миллиметровой бумаге формата А4 с альбомным расположением листа. При этом целесообразно использовать следующий масштаб: по оси частот (абсцисс) – 1 декада = 5 см, по оси ординат – 1 см = 10 Наличие интегратора в ПФ Для оценки точности воспроизведения входного воздействия
и отложить ее на рис. 7.6. Если исходная ЛАЧХ проходит ниже этой точки, то требуется коррекция по точности, если выше, то не требуется. В рассматриваемом примере Далее можно перейти к построению желаемой ЛАЧХ Среднечастотная часть
Следует заметить, что эта частота обычно многократно корректируется в процессе проверки желаемой САУ на выполнение требуемых показателей качества. Пусть задано
Возьмем из этого интервала Высокочастотная часть начинается условно с частоты По виду
где
Рис. 7.6. Желаемая ЛАЧХ
Полученную желаемую систему необходимо проверить в первую очередь на выполнение динамических показателей качества Для этого сначала получим tf-модель
>> WJ=tf([56.23],[1,0])*tf([0.32,1],[1.13,1])*tf([],[0.024,1])
Transfer function: 17.99 s + 56.23 ----------------------------------- 0.02712 s^3 + 1.154 s^2 + s
Оценим запас устойчивости желаемой системы:
>> margin(WJ); grid on
Рис. 7.7. ЛЧХ желаемой системы
Из рис. 7.7. видно, что система устойчива и запас по фазе равен Передаточная функция замкнутой желаемой системы равна
или в tf-форме:
>> FJ=feedback(WJ,1)
Transfer function: 17.99 s + 56.23 ---------------------------------------------------- 0.02712 s^3 + 1.154 s^2 + 18.99 s + 56.23
Вычислим переходную характеристику для желаемой САУ
>> step(FJ); grid on
Рис.7.7. Переходная характеристика желаемой САУ.
Из данного переходного процесса можно определить перерегулирование Если хотя бы одно из неравенств не выполнилось, то пришлось бы перестраивать После выполнения всех требований к проектируемой системе определяется ПФ регулятора положения:
Далее можно переходить к этапу реализации регуляторов всех контуров управления.
РЕАЛИЗАЦИЯ РЕГУЛЯТОРОВ Корректирующие устройства (регуляторы) можно реализовать как на пассивных четырехполюсниках, так и в виде активных фильтров. Последние функционально удобнее, т.к. построены на базе операционных усилителей, которые позволяют организовывать операции вычитания и сложения аналоговых сигналов. Кроме того в отличие от пассивных цепей активные фильтры обладают усилительными свойствами. На их основе легко реализовывать типовые промышленные законы управления (ПИ, ПИД и т.п.). И ещё одно достоинство – все регуляторы, построенные на основе операционных усилителей, можно соединять между собой непосредственно без специальных согласующих устройств и располагать на одной плате, которую обычно называют платой регуляторов. В связи с этим в курсовой работе предлагается использовать активную коррекцию на базе операционных усилителей. Наиболее часто применяемые корректирующие фильтры представлены в табл. 8.1. На их основе можно реализовывать более сложные схемы путем их параллельного и последовательного соединения. Рассмотрим методику реализации всех регуляторов, полученных в процессе коррекции следящей системы. Передаточная функция РН была получена ранее в следующем виде:
Из данного выражения следует, что для реализации этого закона управления (ПИД-регулирование) необходимы усилитель, интегратор, дифференциатор и сумматор. Наиболее часто используемые типовые активные фильтры представлены в табл. 8.1. На их основе (фильтры 1, 2, 3, 7) можно построить ПИД - регулятор в виде схемы, приведенной на рис. 8.1. Для расчета параметров данной функциональной схемы используются следующие тривиальные соотношения:
Таблица 8.1
Продолжение таблицы 8.1.
Все эти соотношения имеют два неизвестных параметра, поэтому одним необходимо задаваться. При этом величины конденсаторов (ёмкостей) исходя из-за массо-габаритных ограничений не должны превышать 10 мкФ, а резисторы (сопротивления) желательно брать в диапазоне 102 – 106 Ом с использованием шкалы номинальных величин класса 1 (разброс ±5%), приведенной в табл. 8.2. Согласно этой шкале, например, с коэффициентом 1.3 изготавливаются резисторы 13 Ом, 130 Ом, 1.3 кОм, 13 кОм, 130 КОм,1.3 МОм.
Рис. 8.1. Схема реализации ПИД – регулятора
Таблица 8.2
Пусть сопротивления R 1, R 3 и R 4 равны соотношениям: R 1= 3 кОм; R 3= 3.9 кОм; R 4= 560 кОм.
В результате получим
В виду того, что операции усиления или деления на основе сумматора реализовывать не требуется, возьмем все сопротивления одинаковыми R 0=10 кОм. Аналогично реализуется регулятор скорости РС с ПИД – законом управления. Между выходом РС и входом РН следует установить дополнительный сумматор для реализации операции вычитания
Рис. 8.2. Схема организации по напряжению обратной связи
На входе РС также необходимо установить сумматор для организации обратной связи (рис. 8.3).
Рис. 8.3. Схема реализации обратной связи по скорости
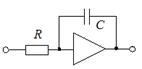
В качестве корректирующего фильтра основного контура регулирования можно взять из табл. 8.1. схему № 5 (рис. 8.4).
Рис. 8.4. Схема реализации регулятора положения
Её передаточная функция равна
Используя полученную ранее ПФ
можно записать следующее соотношение для расчета параметров РП:
Задаваясь сопротивлением R 6 = 51 кОм, получим R 5 = R 6·234.29»1.2 МОм, С 4= 0.32 / R 6 = 0.32/51000» 6.3 мФ, С 5= 1.13/ R 5» 1.13/(1.2·10 6 )» 0.94 мкФ.
В заключение все регуляторы целесообразно объединить в одну схему – управляющее устройство (УУ) (рис. 8.5). Параметры этой схемы (сопротивления и емкости) следует перенумеровать по принятым в электронных схемах правилам: слева - направо, сверху – вниз, как это показано на рис. 8.5. Спецификация элементов УУ приводится в виде табл. 8.3. На этом этап реализации заканчивается.
Таблица 8.3
Рис. 8.5. Функциональная схема УУ следящей системы
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 315; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.126.69 (0.008 с.) |

 – ПФ замкнутого контура скорости, определяемая по методике, которая была использована для расчета ПФ контура напряжения:
– ПФ замкнутого контура скорости, определяемая по методике, которая была использована для расчета ПФ контура напряжения:

 с – эквивалентная малая постоянная времени.
с – эквивалентная малая постоянная времени.
 ,
, с-1.
с-1. (децибел), как это показано на рис. 7.6.
(децибел), как это показано на рис. 7.6. говорит о том, что низкочастотная часть ЛАЧХ исходного нескорректированного контура
говорит о том, что низкочастотная часть ЛАЧХ исходного нескорректированного контура  имеет наклон
имеет наклон  и проходит, через опорную точку
и проходит, через опорную точку  . Эту частоту необходимо откладывать по логарифмической оси lg ω, т.к. она равномерная. Таким образом, сначала вычисляется
. Эту частоту необходимо откладывать по логарифмической оси lg ω, т.к. она равномерная. Таким образом, сначала вычисляется  , откладывается на оси
, откладывается на оси  и затем через эту точку проводится прямая с отрицательным наклоном
и затем через эту точку проводится прямая с отрицательным наклоном  на одну декаду (это по существу гипотенуза треугольника со сторонами 2 см по оси ординат и 5 см по оси абсцисс). Данная
на одну декаду (это по существу гипотенуза треугольника со сторонами 2 см по оси ординат и 5 см по оси абсцисс). Данная  имеет излом в точке
имеет излом в точке  , равный
, равный  (рис. 7.6).
(рис. 7.6). с заданными
с заданными  и
и  следует определить контрольную точку на ранее рассчитанной частоте
следует определить контрольную точку на ранее рассчитанной частоте  с-1 по соотношению
с-1 по соотношению
 (рис. 7.6), поэтому коррекция по точности необходима.
(рис. 7.6), поэтому коррекция по точности необходима. . При проектировании САУ методом ЛЧХ используют типовые характеристики
. При проектировании САУ методом ЛЧХ используют типовые характеристики  , под наклоном
, под наклоном  и проводится под наклоном
и проводится под наклоном  декады. Чем шире среднечастотная часть
декады. Чем шире среднечастотная часть  . Частота среза
. Частота среза  при которой
при которой  , подбирается исходя из заданной длительности переходного процесса
, подбирается исходя из заданной длительности переходного процесса  по приближенному соотношению
по приближенному соотношению .
. Тогда в рассматриваемом примере получим
Тогда в рассматриваемом примере получим .
. и проведем через точку
и проведем через точку  прямую под наклоном
прямую под наклоном  .
. . В нашем случае
. В нашем случае ,
, с-1 – коэффициент передачи желаемой системы; а = 1.75– значение
с-1 – коэффициент передачи желаемой системы; а = 1.75– значение  на оси
на оси  с – постоянная времени, соответствующая контрольной точке АК;
с – постоянная времени, соответствующая контрольной точке АК; = 0.32 с – дополнительная постоянная времени; b = 0.5 – значение
= 0.32 с – дополнительная постоянная времени; b = 0.5 – значение  на оси
на оси 
 .
.
 .
.

 и быстродействие
и быстродействие  с
с  с.
с. , если
, если  , или расширять длину среднечастотного участка, если
, или расширять длину среднечастотного участка, если  .
. .
.

















 кОм,
кОм, мкФ;
мкФ; мкФ.
мкФ. (рис. 8.2), где
(рис. 8.2), где  - задающее напряжение, UН – напряжение обратной связи.
- задающее напряжение, UН – напряжение обратной связи.


 .
. ,
, ,
,  ,
,  .
.



