
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приведение дифференциальных уравнений к виду, удобному для цифрового моделированияСодержание книги
Поиск на нашем сайте
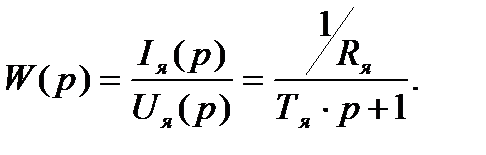
При цифровом моделировании важным является выбор способа математического описания моделируемой системы. Чаще этот выбор является многовариантным и зависит от многих, в том числе и субъективных факторов. Например, динамические системы автоматического регулирования в качестве математического описания используют дифференциальные уравнения, которые могут быть: · Составлены непосредственно по элементам системы; · Составлены по передаточным функциям; · Основаны на понятиях пространства состояний. Выбор формы дифференциальных уравнений определяется, во-первых, тем, что без «физического чутья» моделируемого процесса и понимания процедуры его математизации, трудно осуществить эффективное проектирование. Во-вторых, необходимо учитывать этап реализации. Проанализируем способы записи дифференциальных уравнений на примере якорной цепи двигателя постоянного тока. В качестве примера рассмотрим два варианта математического описания – составление по передаточным функциям и методом прямого программирования. I. Передаточная функция якорной цепи имеет вид:
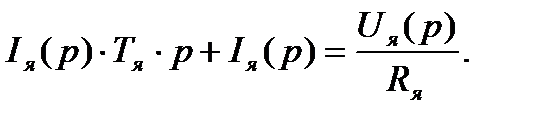
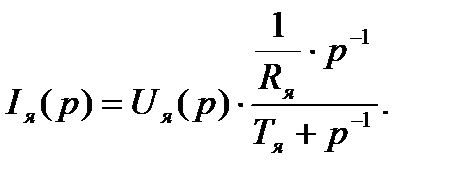
Переход к дифференциальному уравнению:
Во временной области уравнение (62) будет иметь вид:
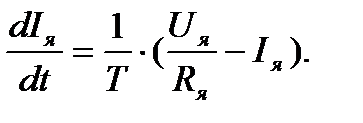
Из выражения (63) можно получить дифференциальное уравнение в привычной для большинства пользователей форме записи:
Полученное дифференциальное уравнение (см. выражение 64) представляет собой математическое описание для якорной цепи пригодное для построения цифровой модели. Оно в полной мере отвечает приведённому выше первому критерию – наглядно отражает физическую сущность объекта. Не решая уравнение можно сказать, что: 1. решение представляет собой возрастание тока якоря 2. установившаяся величина тока якоря известна – это отношение напряжения на якоре к его активному сопротивлению ( 3. скорость переходного процесса определяется величиной II. Составим математическое описание, использующее понятие метода переменных состояний (прямое программирование). Исходная передаточная функция якорной цепи ДПТ:
Разделим числитель и знаменатель выражения (65) на
выразим
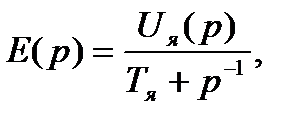
Введём вспомогательную переменную
тогда
Введём вторую вспомогательную переменную:
Переходим во временную область, для этого произведём замену:
Выразим
с учётом вспомогательной переменной
Окончательно, производя замену по уравнению (71), получаем дифференциальное уравнение:
Алгебраическое уравнение, для тока якоря ДПТ, выразим из соотношения (69):
Используя понятие расширенного вектора состояний необходимо, будущую систему уравнений описывающую якорную цепь ДПТ, дополнить дифференциальным уравнением имитирующее входной сигнал (ступенька).
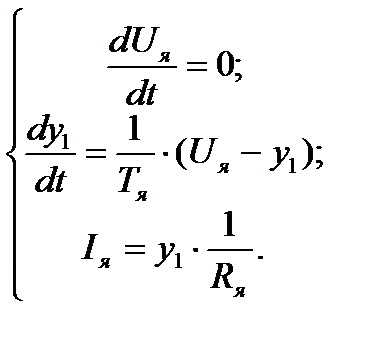
Итак, математическое описание пригодное для создания модели использующее метод пространства состояний имеет вид:
Такое описание апериодического звена (якорной цепи ДПТ) не отображает наглядности протекающих физических процессов, которое имеет математическое выражение в примере моделирования по передаточным функциям (см. (64)). Необходимо также учитывать, что формализация форм представления сигналов в системе продолжается дальше и приходится иметь дело с матрицей коэффициентов, матрицей перехода, которые ещё больше оторваны от физической реальности объекта.
|
||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 184; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.27.154 (0.006 с.) |

 (61)
(61) (62)
(62) (63)
(63) (64)
(64) (при нулевых начальных условиях и скачке входного параметра – напряжения) до некоторой установившейся величины;
(при нулевых начальных условиях и скачке входного параметра – напряжения) до некоторой установившейся величины; ), т.к. только в этом случае при реальных параметрах
), т.к. только в этом случае при реальных параметрах  и
и  производная равна нулю;
производная равна нулю; , чем меньше постоянная времени якоря, тем процесс протекает быстрее.
, чем меньше постоянная времени якоря, тем процесс протекает быстрее.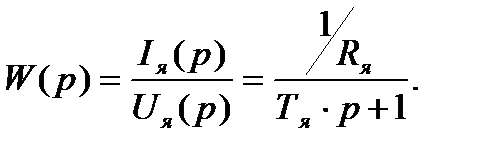 (65)
(65) , получим:
, получим: (66)
(66) :
: (67)
(67) :
: (68)
(68) (69)
(69) (70)
(70) (71)
(71) из формулы (68):
из формулы (68): (72)
(72) :
: (73)
(73) (74)
(74) (75)
(75) (76)
(76) (77)
(77) (78)
(78)


